使用 LC26G-T(AA)和 STM32G071RB 实现精确的 GNSS 定时与定位
面向先进工业应用的高精度定时与定位解决方案

已发布 7月 16, 2025
点击板
GNSS 26 Click
开发板
Nucleo 64 with STM32G071RB MCU
编译器
NECTO Studio
微控制器单元
STM32G071RB
非常适用于 5G ORAN 网络中对高精度基站定时的需求,提供满足下一代基础设施所需的同步精度
A
A
硬件概览
它是如何工作的?
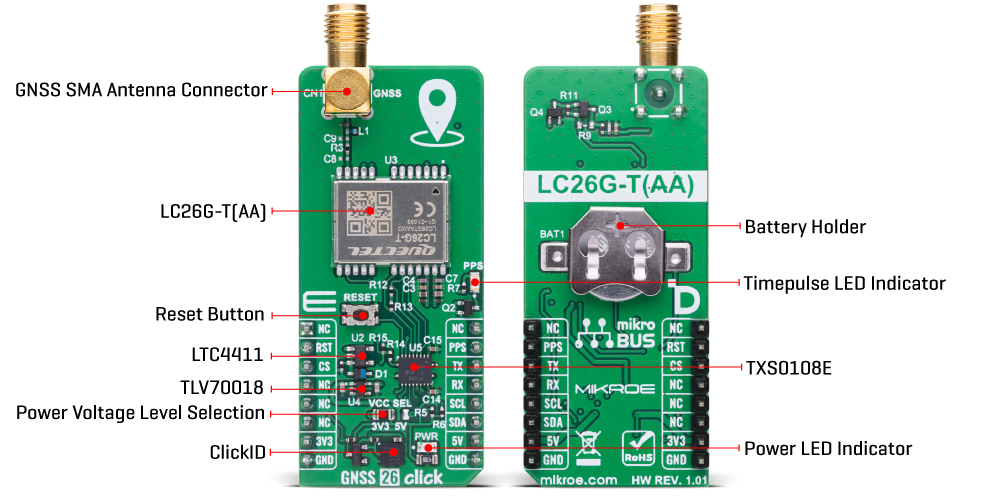
GNSS 26 Click 是一款基于 Quectel 的 LC26G-T(AA)单频多星座 GNSS 接收模块的高性能附加板,通过先进的卫星导航技术(支持 GPS、GLONASS、Galileo、BDS 和 QZSS 系统)提供高精度定时和标准精度定位功能。该模块专为对稳定性和精度要求极高的应用而设计,具备与协调世界时(UTC)同步的纳秒级定时能力,非常适用于精确定时场景。集成的低噪声放大器使其具有高达 -165dBm 的跟踪灵敏度和 -148dBm 的捕获灵敏度,即使在城市密集或遮挡严重的环境中,也能实现快速、可靠的信号捕获。通过多星座支持,LC26G-T(AA)提升了卫星可见性和抗干扰能力,在高达 10km 的海拔下依然能保持精准定位和稳定表现。该模块还支持接收机自主完整性监测(RAIM)和连续相位不确定性估算,
确保定时输出的可靠性和可信度。模块采用高动态范围无线架构,具备模拟与数字干扰抑制功能,增强信号鲁棒性。其 AGNSS 功能显著缩短首次定位时间(冷启动条件下约为 28 秒),即便初始缺乏位置信息、时间和频率数据,仍可迅速获取定位。该 GNSS 解决方案特别适用于新兴的 5G ORAN 网络中的基站定时,以及电网监测与同步等工业级应用。LC26G-T(AA)工作电压为 1.8V,由板载 TLV70018 低压差稳压器提供,该稳压器将 mikroBUS™ 电源轨稳定转换为模块所需的电压等级。除了主电源配置外,GNSS 26 Click 还支持独立运行,板载背面配有一颗纽扣电池,为备份电路供电,即使主电源断开也能保留关键的定时和卫星数据。该板通过标准 UART RX 和 TX 引脚与主控 MCU 进行通信,默认通信速率为
115200bps,确保数据传输高效稳定。同时还支持 I²C快速模式(400kHz)通信,仅限外设模式使用。此外,该 Click 板还包括复位引脚(RST)与一个手动 RESET 按钮,方便模块复位;板载蓝色 PPS LED 指示灯配合 PPS 引脚可检测模块每秒输出的同步脉冲信号;另配有一个 SMA 接头,方便连接 MIKROE 提供的 GNSS 天线(如 Active GPS Antenna),以实现灵活高效的连接方式。GNSS 26 Click 支持 3.3V 和 5V 逻辑电平的主控系统,通过 VCC SEL 跳帽进行选择。考虑到 LC26G-T(AA)模块本身使用 1.8V 电平,板载集成 TXS0108E 电平转换器,确保信号正确传输,使不同电压等级的 MCU 均可无缝通信。此外,该 Click 板配备功能丰富的软件库及示例代码,为用户的二次开发提供了便捷参考。
功能概述
开发板
Nucleo-64 搭载 STM32G071RB MCU 提供了一种经济高效且灵活的平台,供开发者探索新想法并原型设计他们的项目。该板利用 STM32 微控制器的多功能性,使用户能够为他们的项目选择最佳的性能与功耗平衡。它配备了 LQFP64 封装的 STM32 微控制器,并包含了如用户 LED(同时作为 ARDUINO® 信号)、用户和复位按钮,以及 32.768kHz 晶体振荡器用于精确的计时操作等基本组件。Nucleo-64 板设计考虑到扩展性和灵活性,它特有的 ARDUINO® Uno
V3 扩展连接器和 ST morpho 扩展引脚头,提供了对 STM32 I/O 的完全访问,以实现全面的项目整合。电源供应选项灵活,支持 ST-LINK USB VBUS 或外部电源,确保在各种开发环境中的适应性。该板还配备了一个具有 USB 重枚举功能的板载 ST-LINK 调试器/编程器,简化了编程和调试过程。此外,该板设计旨在简化高级开发,它的外部 SMPS 为 Vcore 逻辑供电提供高效支持,支持 USB 设备全速或 USB SNK/UFP 全速,并内置加密功能,提升了项目的功效
和安全性。通过外部 SMPS 实验的专用连接器、 用于 ST-LINK 的 USB 连接器以及 MIPI® 调试连接器,提供了更多的硬件接口和实验可能性。开发者将通过 STM32Cube MCU Package 提供的全面免费软件库和示例得到广泛支持。这些,加上与多种集成开发环境(IDE)的兼容性,包括 IAR Embedded Workbench®、MDK-ARM 和 STM32CubeIDE,确保了流畅且高效的开发体验,使用户能够充分利用 Nucleo-64 板在他们的项目中的能力。

微控制器概述
MCU卡片 / MCU

建筑
ARM Cortex-M0
MCU 内存 (KB)
128
硅供应商
STMicroelectronics
引脚数
64
RAM (字节)
36864
你完善了我!
配件
Click Shield for Nucleo-64 配备了两个专有的 mikroBUS™ 插座,使得所有的 Click board™ 设备都可以轻松地与 STM32 Nucleo-64 开发板连接。这样,Mikroe 允许其用户从不断增长的 Click boards™ 范围中添加任何功能,如 WiFi、GSM、GPS、蓝牙、ZigBee、环境传感器、LED、语音识别、电机控制、运动传感器等。您可以使用超过 1537 个 Click boards™,这些 Click boards™ 可以堆叠和集成。STM32 Nucleo-64 开发板基于 64 引脚封装的微控制器,采用 32 位 MCU,配备 ARM Cortex M4 处理器,运行速度为 84MHz,具有 512Kb Flash 和 96KB SRAM,分为两个区域,顶部区域代表 ST-Link/V2 调试器和编程器,而底部区域是一个实际的开发板。通过 USB 连接方便地控制和供电这些板子,以便直接对 Nucleo-64 开发板进行编程和高效调试,其中还需要额外的 USB 线连接到板子上的 USB 迷你接口。大多数 STM32 微控制器引脚都连接到了板子左右边缘的 IO 引脚上,然后连接到两个现有的 mikroBUS™ 插座上。该 Click Shield 还有几个开关,用于选择 mikroBUS™ 插座上模拟信号的逻辑电平和 mikroBUS™ 插座本身的逻辑电压电平。此外,用户还可以通过现有的双向电平转换器,使用任何 Click board™,无论 Click board™ 是否在 3.3V 或 5V 逻辑电压电平下运行。一旦将 STM32 Nucleo-64 开发板与我们的 Click Shield for Nucleo-64 连接,您就可以访问数百个工作于 3.3V 或 5V 逻辑电压电平的 Click boards™。

主动 GPS 天线旨在增强您的 GPS 和 GNSS Click 板™ 的性能。这款外置天线结构坚固,适用于各种天气条件。凭借 1575.42MHz 的频率范围和 50Ohm 的阻抗,它确保了可靠的信号接收。天线在较宽的角度范围内提供大于 -4dBic 的增益,确保超过 75% 的覆盖率。± 5MHz 的带宽进一步保证了精确的数据采集。天线采用右旋圆极化 (RHCP),提供稳定的信号接收。其紧凑的尺寸为 48.5×39×15mm,配有 2 米长的电缆,安装方便。磁性天线类型与 SMA 公连接器确保了安全便捷的连接。如果您需要为定位设备提供可靠的外置天线,我们的主动 GPS 天线是完美的解决方案。

使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
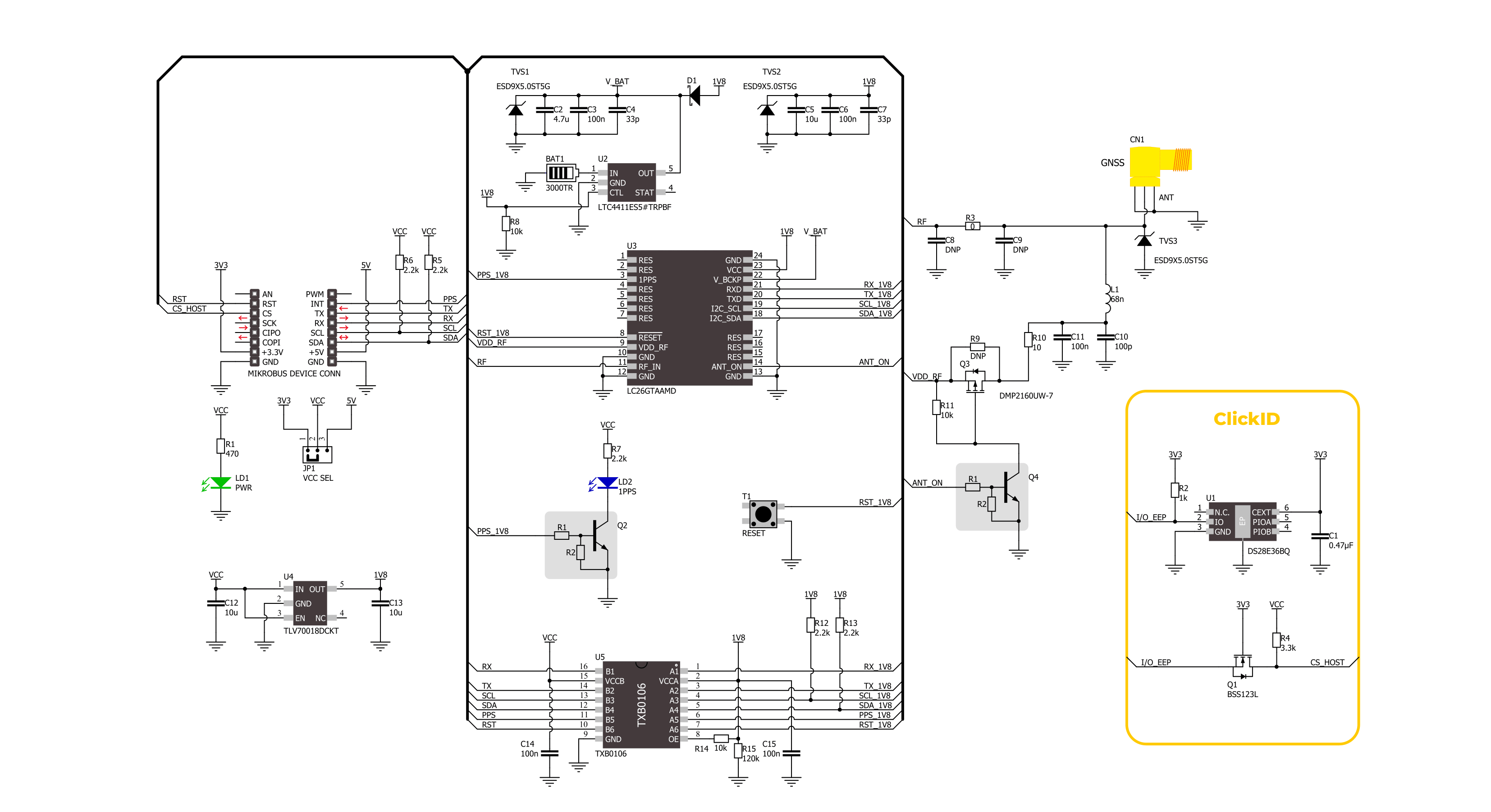
Click board™ 原理图
一步一步来
项目组装
从选择您的开发板和Click板™开始。以Nucleo 64 with STM32G071RB MCU作为您的开发板开始。












软件支持
库描述
GNSS 26 Click 演示应用程序使用 NECTO Studio开发,确保与 mikroSDK 的开源库和工具兼容。该演示设计为即插即用,可与所有具有 mikroBUS™ 插座的 开发板、入门板和 mikromedia 板完全兼容,用于快速实现和测试。
示例描述
本示例演示了如何使用 GNSS 26 Click 读取并显示 GNSS 坐标数据。
关键功能:
gnss26_cfg_setup- 初始化 Click 配置结构体为默认值。gnss26_init- 初始化使用该 Click 板所需的所有引脚和外设。gnss26_generic_read- 通过 UART 或 I²C 接口读取指定数量的数据字节。gnss26_parse_gga- 从接收缓冲区中解析 NMEA GGA 定位信息。gnss26_get_pps_pin- 返回 PPS(每秒脉冲)引脚的逻辑状态。
应用初始化
初始化驱动和日志系统。
应用任务
读取接收到的数据,从中解析 NMEA GGA 信息,并在接收到定位数据后,通过 USB UART 显示经纬度坐标。
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* @file main.c
* @brief GNSS 26 Click Example.
*
* # Description
* This example demonstrates the use of GNSS 26 Click by reading and displaying
* the GNSS coordinates.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and logger.
*
* ## Application Task
* Reads the received data, parses the NMEA GGA info from it, and once it receives
* the position fix it will start displaying the coordinates on the USB UART.
*
* ## Additional Function
* - static void gnss26_clear_app_buf ( void )
* - static void gnss26_log_app_buf ( void )
* - static err_t gnss26_process ( gnss26_t *ctx )
* - static void gnss26_parser_application ( uint8_t *rsp )
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "gnss26.h"
// Application buffer size
#define APP_BUFFER_SIZE 800
#define PROCESS_BUFFER_SIZE 400
static gnss26_t gnss26;
static log_t logger;
static uint8_t app_buf[ APP_BUFFER_SIZE ] = { 0 };
static int32_t app_buf_len = 0;
static uint8_t i2c_data_ready = 0;
/**
* @brief GNSS 26 clearing application buffer.
* @details This function clears memory of application buffer and reset its length.
* @note None.
*/
static void gnss26_clear_app_buf ( void );
/**
* @brief GNSS 26 log application buffer.
* @details This function logs data from application buffer to USB UART.
* @note None.
*/
static void gnss26_log_app_buf ( void );
/**
* @brief GNSS 26 data reading function.
* @details This function reads data from device and concatenates data to application buffer.
* @param[in] ctx : Click context object.
* See #gnss26_t object definition for detailed explanation.
* @return @li @c 0 - Read some data.
* @li @c -1 - Nothing is read.
* See #err_t definition for detailed explanation.
* @note None.
*/
static err_t gnss26_process ( gnss26_t *ctx );
/**
* @brief GNSS 26 parser application.
* @details This function logs GNSS data on the USB UART.
* @param[in] rsp Response buffer.
* @return None.
* @note None.
*/
static void gnss26_parser_application ( uint8_t *rsp );
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
gnss26_cfg_t gnss26_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
gnss26_cfg_setup( &gnss26_cfg );
GNSS26_MAP_MIKROBUS( gnss26_cfg, MIKROBUS_1 );
if ( UART_ERROR == gnss26_init( &gnss26, &gnss26_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
if ( GNSS26_OK == gnss26_process( &gnss26 ) )
{
gnss26_parser_application( app_buf );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
static void gnss26_clear_app_buf ( void )
{
memset( app_buf, 0, app_buf_len );
app_buf_len = 0;
}
static void gnss26_log_app_buf ( void )
{
for ( int32_t buf_cnt = 0; buf_cnt < app_buf_len; buf_cnt++ )
{
log_printf( &logger, "%c", app_buf[ buf_cnt ] );
}
}
static err_t gnss26_process ( gnss26_t *ctx )
{
uint8_t rx_buf[ PROCESS_BUFFER_SIZE ] = { 0 };
int32_t overflow_bytes = 0;
int32_t rx_cnt = 0;
int32_t rx_size = 0;
if ( ( GNSS26_DRV_SEL_I2C == ctx->drv_sel ) && ( !i2c_data_ready ) )
{
uint16_t pps_wait_log_cnt = 0;
while ( !gnss26_get_pps_pin ( ctx ) )
{
if ( ++pps_wait_log_cnt > 5000 )
{
log_printf( &logger, " Waiting for the position fix (PPS signal)...\r\n\n" );
pps_wait_log_cnt = 0;
}
Delay_ms ( 1 );
}
i2c_data_ready = 1;
Delay_ms ( 500 );
}
rx_size = gnss26_generic_read( ctx, rx_buf, PROCESS_BUFFER_SIZE );
if ( ( rx_size > 0 ) && ( rx_size <= APP_BUFFER_SIZE ) )
{
if ( ( app_buf_len + rx_size ) > APP_BUFFER_SIZE )
{
overflow_bytes = ( app_buf_len + rx_size ) - APP_BUFFER_SIZE;
app_buf_len = APP_BUFFER_SIZE - rx_size;
memmove ( app_buf, &app_buf[ overflow_bytes ], app_buf_len );
memset ( &app_buf[ app_buf_len ], 0, overflow_bytes );
}
for ( rx_cnt = 0; rx_cnt < rx_size; rx_cnt++ )
{
if ( rx_buf[ rx_cnt ] && ( GNSS26_DUMMY != rx_buf[ rx_cnt ] ) )
{
app_buf[ app_buf_len++ ] = rx_buf[ rx_cnt ];
}
}
return GNSS26_OK;
}
return GNSS26_ERROR;
}
static void gnss26_parser_application ( uint8_t *rsp )
{
uint8_t element_buf[ 200 ] = { 0 };
if ( GNSS26_OK == gnss26_parse_gga( rsp, GNSS26_GGA_LATITUDE, element_buf ) )
{
static uint8_t wait_for_fix_cnt = 0;
if ( strlen( element_buf ) > 0 )
{
log_printf( &logger, "\r\n Latitude: %.2s degrees, %s minutes\r\n", element_buf, &element_buf[ 2 ] );
memset( element_buf, 0, sizeof( element_buf ) );
gnss26_parse_gga( rsp, GNSS26_GGA_LONGITUDE, element_buf );
log_printf( &logger, " Longitude: %.3s degrees, %s minutes\r\n", element_buf, &element_buf[ 3 ] );
memset( element_buf, 0, sizeof( element_buf ) );
gnss26_parse_gga( rsp, GNSS26_GGA_ALTITUDE, element_buf );
log_printf( &logger, " Altitude: %s m\r\n", element_buf );
wait_for_fix_cnt = 0;
}
else
{
if ( wait_for_fix_cnt % 5 == 0 )
{
log_printf( &logger, " Waiting for the position fix...\r\n\n" );
wait_for_fix_cnt = 0;
}
wait_for_fix_cnt++;
}
gnss26_clear_app_buf( );
i2c_data_ready = 0;
}
}
// ------------------------------------------------------------------------ END
额外支持
资源
类别:GPS/GNSS