使用VCNL4010和TM4C1294KCPDT提供近距离接近感应功能
检测到物体靠近而无需物理接触

已发布 6月 24, 2024
点击板
Proximity Click
开发板
Fusion for Tiva v8
编译器
NECTO Studio
微控制器单元
TM4C1294KCPDT
通过提供对附近物体或个体的实时感知,增强安全和保障。
A
A
硬件概览
它是如何工作的?
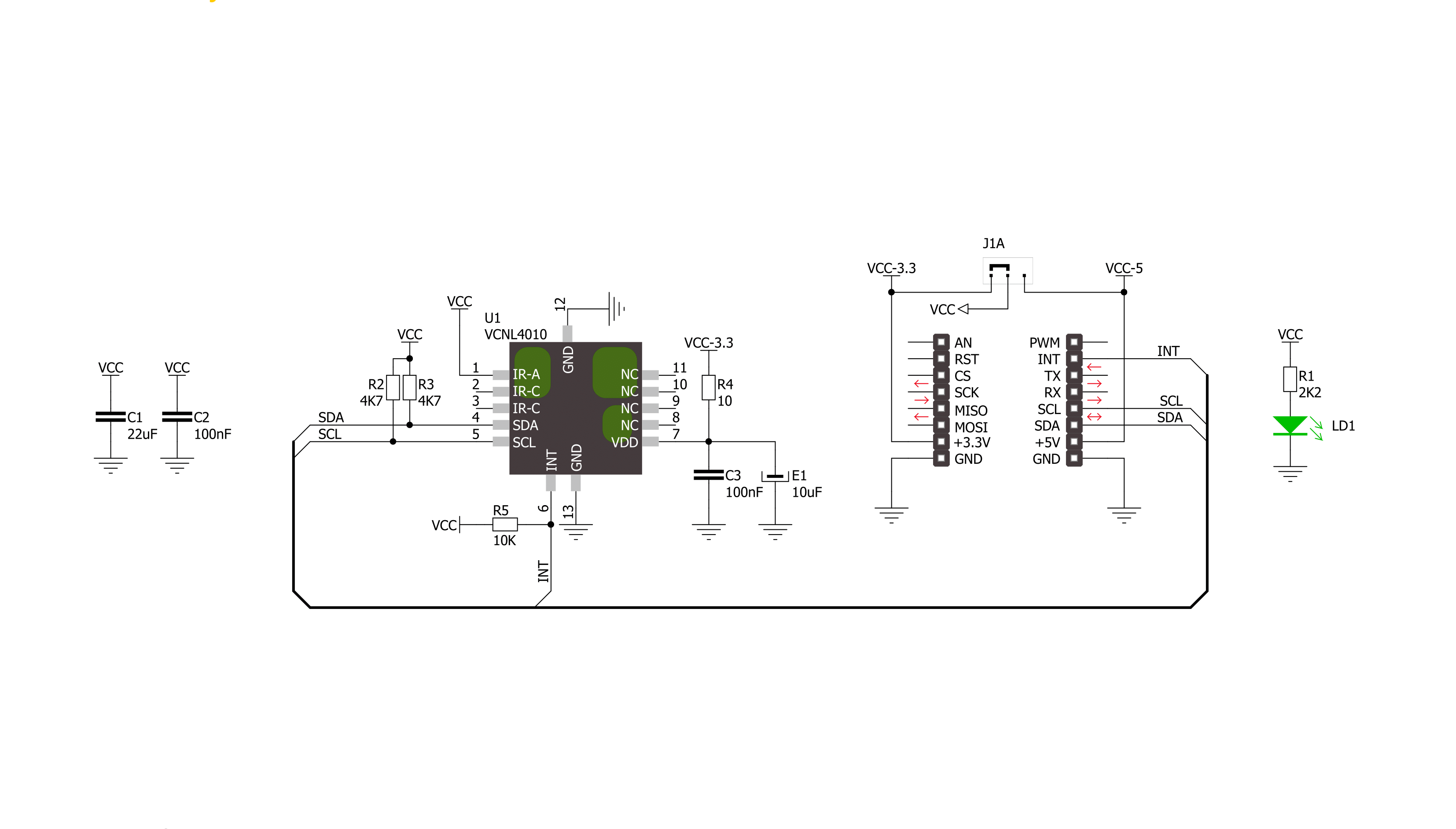
Proximity Click 基于 Vishay Semiconductors 的 VCNL4010,这是一个集成了接近和环境光传感器的全功能设备。VCNL4010 结合了用于接近测量的红外发射器和 PIN 光电二极管、环境光传感器以及信号处理集成电路,这些都封装在一个带有 16 位 ADC 的单元中。其接近范围可达 20cm(7.9英寸),光线范围从 0.25lx 到 16klx,支持传统背光、显示亮度自动调 节以及接近感应,以减少消费者和工业应用中因不需
要机械障碍物来光学隔离发射器和探测器而可能导致的意外触摸输入。VCNL4010 通过标准的 I2C 两线接口与 MCU 通信,用以读取数据和配置设置,兼容所有高达 3.4MHz 的 I2C 模式。标准的串行数字接口可以访问“接近信号”和“光强度”,无需外部控制器进行复杂的计算和编程。此外,可编程的中断功能,连接到 mikroBUS™ 插座上的 INT 引脚,为主 MCU 提供了在接近事件或环境光变化发生时的唤醒功能,这通过
消除连续轮询的需求,减少了处理开销。此 Click board™ 可以通过 I/O 级别跳线选择使用 3.3V 或 5V 的逻辑电压水平,使得 3.3V 和 5V 能力的 MCU 都可以正确使用通信线路。此外,这款 Click board™ 配备了包含易于使用的功能和示例代码的库,可用于开发。

功能概述
开发板
Fusion for TIVA v8 是一款专为快速开发嵌入式应用的需求而特别设计的开发板。它支持广泛的微控制器,如不同的32位ARM® Cortex®-M基础MCUs,来自Texas Instruments,无论它们的引脚数量如何,并且具有一系列独特功能,例如首次通过WiFi网络实现的嵌入式调试器/程序员。开发板布局合理,设计周到,使得最终用户可以在一个地方找到所有必要的元素,如开关、按钮、指示灯、连接器等。得益于创新的制造技术,Fusion for TIVA v8 提供了流畅而沉浸式的工作体验,允许在任何情况下、任何地方、任何
时候都能访问。Fusion for TIVA v8开发板的每个部分都包含了使同一板块运行最高效的必要组件。一个先进的集成CODEGRIP程序/调试模块提供许多有价值的编程/调试选项,包括对JTAG、SWD和SWO Trace(单线输出)的支持,并与Mikroe软件环境无缝集成。此外,它还包括一个干净且调节过的开发板电源供应模块。它可以使用广泛的外部电源,包括电池、外部12V电源供应和通过USB Type-C(USB-C)连接器的电源。通信选项如USB-UART、USB HOST/DEVICE、CAN(如果MCU卡支持的话)和以
太网也包括在内。此外,它还拥有广受好评的 mikroBUS™标准,为MCU卡提供了标准化插座(SiBRAIN标准),以及两种显示选项,用于TFT板线产品和基于字符的LCD。Fusion for TIVA v8 是Mikroe快速开发生态系统的一个组成部分。它由Mikroe软件工具原生支持,得益于大量不同的Click板™(超过一千块板),其数量每天都在增长,它涵盖了原型制作和开发的许多方面。

微控制器概述
MCU卡片 / MCU

类型
8th Generation
建筑
ARM Cortex-M4
MCU 内存 (KB)
512
硅供应商
Texas Instruments
引脚数
128
RAM (字节)
262144
使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
Click board™ 原理图
一步一步来
项目组装

从选择您的开发板和Click板™开始。以Fusion for Tiva v8作为您的开发板开始













实时跟踪您的结果
应用程序输出
1. 应用程序输出 - 在调试模式下,“应用程序输出”窗口支持实时数据监控,直接提供执行结果的可视化。请按照提供的教程正确配置环境,以确保数据正确显示。

2. UART 终端 - 使用UART Terminal通过USB to UART converter监视数据传输,实现Click board™与开发系统之间的直接通信。请根据项目需求配置波特率和其他串行设置,以确保正常运行。有关分步设置说明,请参考提供的教程。

3. Plot 输出 - Plot功能提供了一种强大的方式来可视化实时传感器数据,使趋势分析、调试和多个数据点的对比变得更加直观。要正确设置,请按照提供的教程,其中包含使用Plot功能显示Click board™读数的分步示例。在代码中使用Plot功能时,请使用以下函数:plot(insert_graph_name, variable_name);。这是一个通用格式,用户需要将“insert_graph_name”替换为实际图表名称,并将“variable_name”替换为要显示的参数。

软件支持
库描述
此库包含 Proximity Click 驱动程序的 API。
关键功能:
proximity_write_data- 用于写入数据的函数。proximity_read_prox_data- 用于读取接近数据的函数。proximity_read_ambient_light- 用于读取环境光数据的函数。
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* \file
* \brief Proximity Click example
*
* # Description
* Measures proximity data and ambient light.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization driver init and sets chip on the default mode
*
* ## Application Task
* Reads Proximity data and Ambient light data and logs data to USBUART every 500 ms.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "proximity.h"
// ------------------------------------------------------------------ VARIABLES
static proximity_t proximity;
static log_t logger;
uint16_t proximity_ambi_value;
uint16_t proximity_proxi_value;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
proximity_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
proximity_cfg_setup( &cfg );
PROXIMITY_MAP_MIKROBUS( cfg, MIKROBUS_1 );
proximity_init( &proximity, &cfg );
proximity_set_default_mode( &proximity );
}
void application_task ( void )
{
// Task implementation.
proximity_ambi_value = proximity_read_ambient_light( &proximity );
proximity_proxi_value = proximity_read_prox_data( &proximity );
log_printf( &logger, "Proximity: %u\r\n", proximity_proxi_value );
log_printf( &logger, " Ambient: %u LUX\r\n ", proximity_ambi_value );
Delay_ms( 500 );
}
void main ( void )
{
application_init( );
for ( ; ; )
{
application_task( );
}
}
// ------------------------------------------------------------------------ END














