使用ATmega644检测正弦波形中的过渡点
感知正弦信号的起伏

已发布 6月 27, 2024
点击板
Zero-Cross Click
开发板
EasyAVR v7
编译器
NECTO Studio
微控制器单元
ATmega644
为工程师和创新者设计的我们的正弦变化检测解决方案确保您捕捉到信号中的每一次变化,让您能够有效地应对应用程序中的动态变化。
A
A
硬件概览
它是如何工作的?
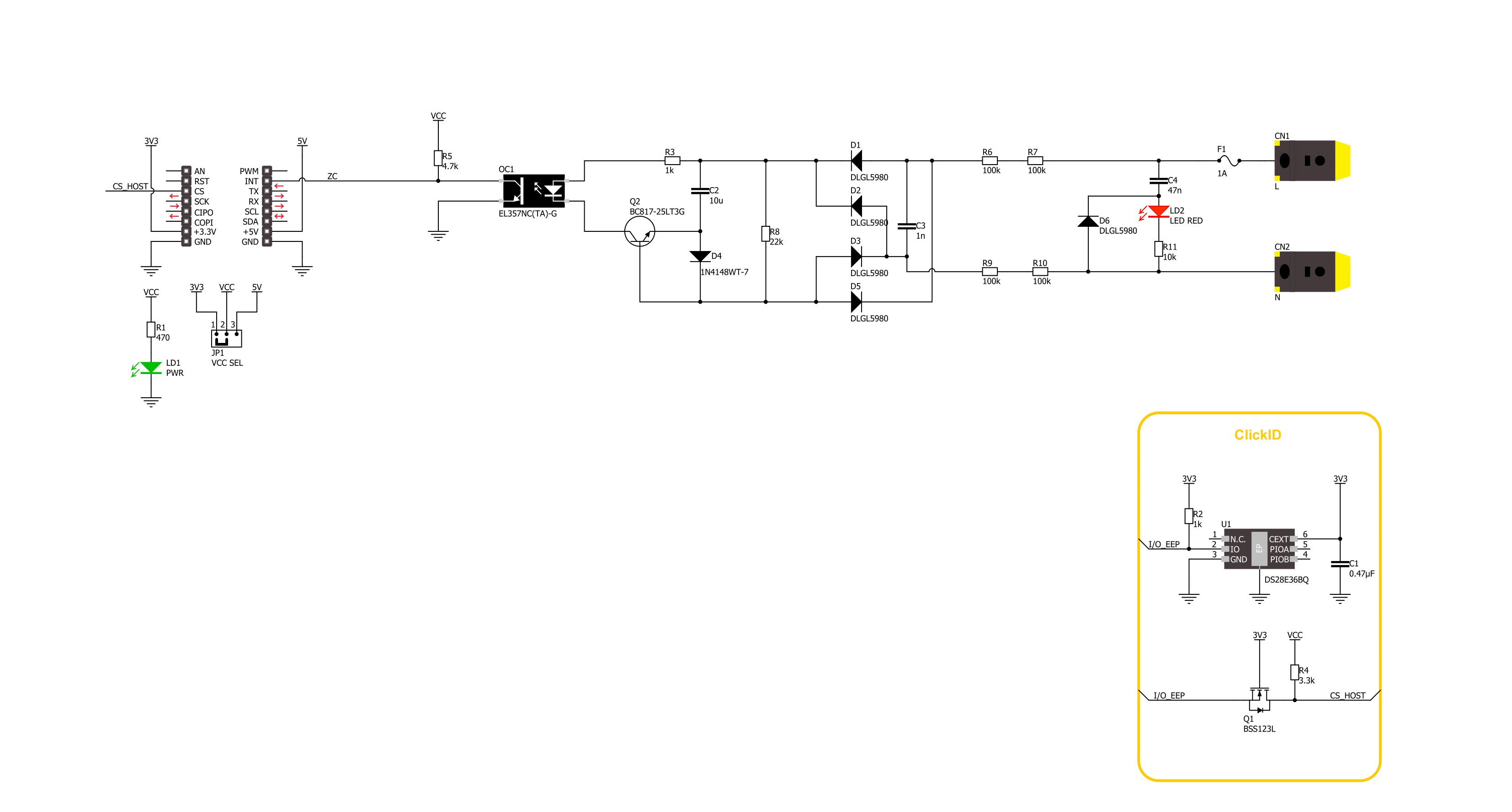
Zero-Cross Click基于提供零点穿越检测(ZCD)的电路。交流电可以通过两个块端子连接。由于此Click板™旨在与高电压一起使用,关键组件放置在底部,但在使用此Click板™时仍需采取所有预防措施。顶部有一个交流开启LED,以可视方式表示交流存在。所有的魔法都发生在这个Click板™底部的电
路中。电流通过Graetz桥电路,由四个DLGL5980组成。交流电转换为直流电,这对于驱动EL357N-G,来自Everlight的光电晶体光耦合器中的LED是必要的。当激活时,光耦合器将低逻辑状态发送到ZC引脚,该引脚用于Zero-Cross Click与主机MCU通信。此Click板™可以通过VCC SEL跳线选择3.3V或5V逻
辑电压电平。这样,既能使3.3V也能使5V能力的MCU正确使用通信线路。此外,此Click板™配备了一个包含易于使用的函数和示例代码的库,可用作进一步开发的参考。

功能概述
开发板
EasyAVR v7 是第七代AVR开发板,专为快速开发嵌入式应用的需求而设计。它支持广泛的16位AVR微控制器,来自Microchip,并具有一系列独特功能,如强大的板载mikroProg程序员和通过USB的在线电路调试器。开发板布局合理,设计周到,使得最终用户可以在一个地方找到所有必要的元素,如开关、按钮、指示灯、连接器等。EasyAVR v7 通过每个端口的四种不同连接器,比以往更高效地连接附件板、传感器和自定义电子产品。EasyAVR v7 开发板的每个部分
都包含了使同一板块运行最高效的必要组件。一个集成的mikroProg,一个快速的USB 2.0程序员,带有mikroICD硬件在线电路调试器,提供许多有价值的编 程/调试选项和与Mikroe软件环境的无缝集成。除此之外,它还包括一个干净且调节过的开发板电源供应模块。它可以使用广泛的外部电源,包括外部12V电源供应,7-12V交流或9-15V直流通过DC连接器/螺丝端子,以及通过USB Type-B(USB-B)连接器的电源。通信选项如USB-UART和RS-232也包括在内,与
广受好评的mikroBUS™标准、三种显示选项(7段、图形和基于字符的LCD)和几种不同的DIP插座一起,覆盖了广泛的16位AVR MCU。EasyAVR v7 是Mikroe快速开发生态系统的一个组成部分。它由Mikroe软件工具原生支持,得益于大量不同的Click板™(超过一千块板),其数量每天都在增长,它涵盖了原型制作和开发的许多方面。

微控制器概述
MCU卡片 / MCU
建筑
AVR
MCU 内存 (KB)
64
硅供应商
Microchip
引脚数
40
RAM (字节)
4096
使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
Click board™ 原理图
一步一步来
项目组装

从选择您的开发板和Click板™开始。以EasyAVR v7作为您的开发板开始。














实时跟踪您的结果
应用程序输出
1. 应用程序输出 - 在调试模式下,“应用程序输出”窗口支持实时数据监控,直接提供执行结果的可视化。请按照提供的教程正确配置环境,以确保数据正确显示。

2. UART 终端 - 使用UART Terminal通过USB to UART converter监视数据传输,实现Click board™与开发系统之间的直接通信。请根据项目需求配置波特率和其他串行设置,以确保正常运行。有关分步设置说明,请参考提供的教程。

3. Plot 输出 - Plot功能提供了一种强大的方式来可视化实时传感器数据,使趋势分析、调试和多个数据点的对比变得更加直观。要正确设置,请按照提供的教程,其中包含使用Plot功能显示Click board™读数的分步示例。在代码中使用Plot功能时,请使用以下函数:plot(insert_graph_name, variable_name);。这是一个通用格式,用户需要将“insert_graph_name”替换为实际图表名称,并将“variable_name”替换为要显示的参数。

软件支持
库描述
该库包含 Zero-Cross Click 驱动程序的 API。
关键功能:
zerocross_pin_read- 零点穿越引脚读取函数。zerocross_get_freq- 零点穿越频率读取函数。
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* @file main.c
* @brief Zero-Cross Click Example.
*
* # Description
* This example demonstrates the use of the Zero-Cross Click board.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization of the log UART and basic Click initialisation.
*
* ## Application Task
* Reading frequency value approximately once every second.
*
* @author Stefan Ilic
*
*/
#include "board.h"
#include "log.h"
#include "zerocross.h"
static zerocross_t zerocross; /**< Zero-Cross Click driver object. */
static log_t logger; /**< Logger object. */
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
zerocross_cfg_t zerocross_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
zerocross_cfg_setup( &zerocross_cfg );
ZEROCROSS_MAP_MIKROBUS( zerocross_cfg, MIKROBUS_1 );
if ( DIGITAL_OUT_UNSUPPORTED_PIN == zerocross_init( &zerocross, &zerocross_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
float freq_val = 0;
zerocross_get_freq( &zerocross, &freq_val );
log_printf( &logger, " Freq %.2f Hz \n\r", freq_val );
}
void main ( void )
{
application_init( );
for ( ; ; )
{
application_task( );
}
}
// ------------------------------------------------------------------------ END