使用DRV777和PIC32MZ2048EFM100体验无缝负载管理
驱动创新,一次驱动一个负载

已发布 6月 25, 2024
点击板
Driver Click
开发板
Curiosity PIC32 MZ EF
编译器
NECTO Studio
微控制器单元
PIC32MZ2048EFM100
我们的创新解决方案采用七个集成的高电流驱动器,提供了一个多功能平台,用于驱动各种负载,助力您的创造性突破。
A
A
硬件概览
它是如何工作的?
Driver Click 基于德州仪器的 DRV777,这是一款集成的电机和继电器驱动器。该 IC 具有七个集成的电流下沉驱动器。每个通道都有一个自由回转二极管,连接到用于感应回踢电压保护的公共引脚 (COM)。这种回踢电压通常在电动机和继电器中观察到,因此这种保护的存在使该驱动器成为驱动电动机、继电器和其他可以产生反电动势的感应负载的良好选择。每个输出由一个输入引脚控制。输入的逻辑高电平将导致相应输出的低电平状态,允许单个驱动器下沉高达 140mA 的电流。输入逻辑电压电平可以在 1.8V 到 5V 之间,从而允许使用各种 MCU。输入级通过 RC 缓冲滤波器过滤,允许 Click board™ 在嘈杂的环境中使用。输入引脚上的逻辑低电平将设置输出驱动器为高电平状态,允许引
脚和地之间的电压高达 16V(绝对最大值为 20V)。在高电平状态下,输出驱动器将不下沉电流。出于这个原因,输入配备了弱下拉电阻,允许输入保持悬空或三态,确保输出驱动器不会意外驱动连接的负载。输出驱动器每通道能够下沉高达 140mA 的电流。然而,DRV777 IC 允许输出并联使用,组合可以下沉的电流。这允许在所有驱动器组合时下沉高达 1A 的电流。此外,可以组合更多的 Click board™,允许下沉更多电流。此 Click board™ 配备了九极弹簧端子。每个输出都路由到端子,外加 COM 引脚和 GND。此引脚是所有自由回转二极管的公共阴极引脚,应特别注意将此引脚连接到与连接负载相同的电压电位。如果不连接,可能会对输出驱动器造成永久性损坏。负载的 GND 应连接到九
极弹簧端子的 GND 输入。通过使用输出连接器,可以使用相同的 Click board™ 实现各种连接。驱动器可以驱动继电器、电机或这些的组合。DRV777 数据手册提供了几种连接和驱动解决方案。它还提供了有关 IC 本身的更深入信息。虽然 IC 仅使用来自 mikroBUS™ 的 5V 电源轨,但 Driver Click 可以自由地与 3.3V 或 5V MCU 接口。它不需要特殊的逻辑电压电平选择跳线。然而,它有两个标记为 IN6 和 IN7 的 SMD 跳线,用于启用或禁用这些驱动器输入。这样做是为了防止在某些情况下与 UART 模块干扰,因为这两个引脚路由到 mikroBUS™ 的 RX 和 TX 引脚。

功能概述
开发板
Curiosity PIC32 MZ EF 开发板是一个完全集成的 32 位开发平台,特点是高性能的 PIC32MZ EF 系列(PIC32MZ2048EFM),该系列具有 2MB Flash、512KB RAM、集成的浮点单元(FPU)、加密加速器和出色的连接选项。它包括一个集成的程序员和调试器,无需额外硬件。用户可以通过 MIKROE
mikroBUS™ Click™ 适配器板扩展功能,通过 Microchip PHY 女儿板添加以太网连接功能,使用 Microchip 扩展板添加 WiFi 连接能力,并通过 Microchip 音频女儿板添加音频输入和输出功能。这些板完全集成到 PIC32 强大的软件框架 MPLAB Harmony 中,该框架提供了一个灵活且模块化的接口
来应用开发、一套丰富的互操作软件堆栈(TCP-IP、USB)和易于使用的功能。Curiosity PIC32 MZ EF 开发板提供了扩展能力,使其成为连接性、物联网和通用应用中快速原型设计的绝佳选择。

微控制器概述
MCU卡片 / MCU

建筑
PIC32
MCU 内存 (KB)
2048
硅供应商
Microchip
引脚数
100
RAM (字节)
524288
使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
Click board™ 原理图

一步一步来
项目组装

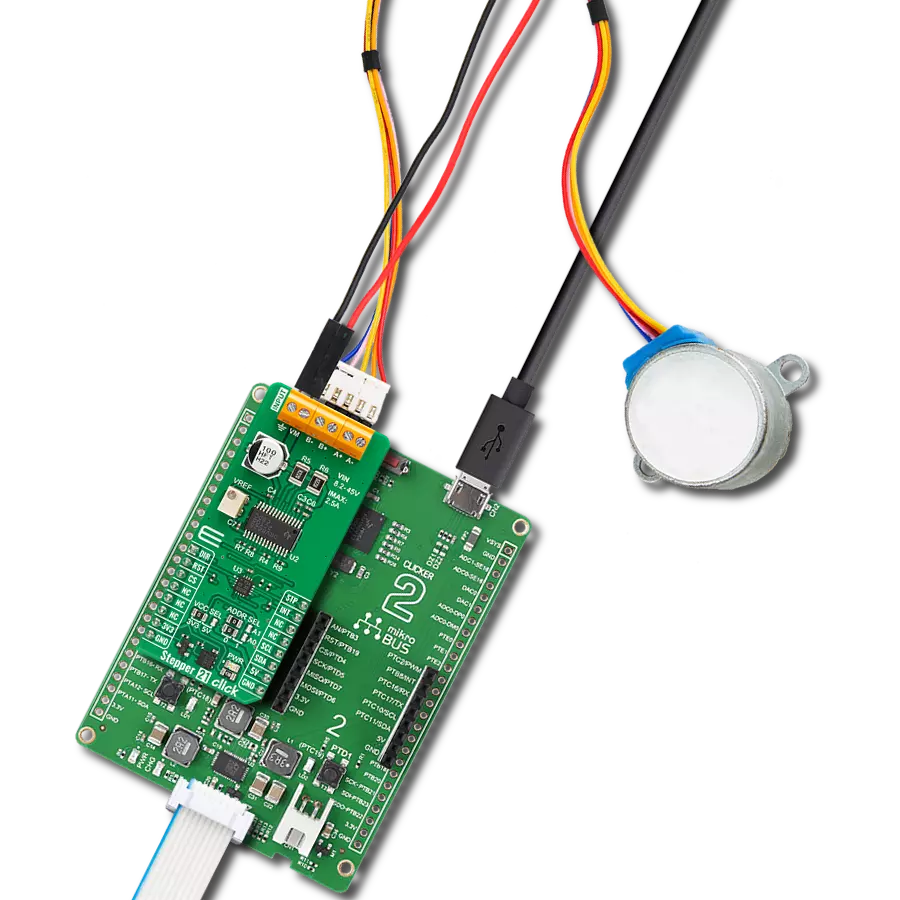
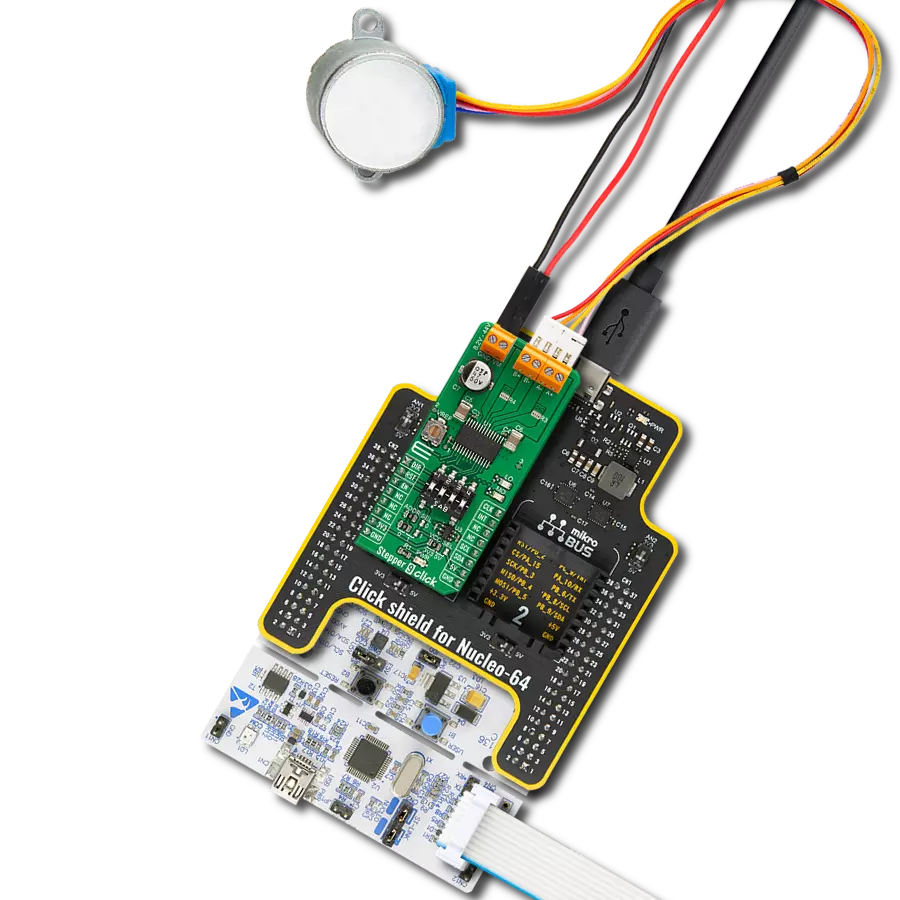
从选择您的开发板和Click板™开始。以Curiosity PIC32 MZ EF作为您的开发板开始。














实时跟踪您的结果
应用程序输出
1. 应用程序输出 - 在调试模式下,“应用程序输出”窗口支持实时数据监控,直接提供执行结果的可视化。请按照提供的教程正确配置环境,以确保数据正确显示。

2. UART 终端 - 使用UART Terminal通过USB to UART converter监视数据传输,实现Click board™与开发系统之间的直接通信。请根据项目需求配置波特率和其他串行设置,以确保正常运行。有关分步设置说明,请参考提供的教程。

3. Plot 输出 - Plot功能提供了一种强大的方式来可视化实时传感器数据,使趋势分析、调试和多个数据点的对比变得更加直观。要正确设置,请按照提供的教程,其中包含使用Plot功能显示Click board™读数的分步示例。在代码中使用Plot功能时,请使用以下函数:plot(insert_graph_name, variable_name);。这是一个通用格式,用户需要将“insert_graph_name”替换为实际图表名称,并将“variable_name”替换为要显示的参数。

软件支持
库描述
该库包含用于 Driver Click 驱动程序的 API。
关键功能:
driver_set_in1- 设置 IN1 的功能driver_set_in2- 设置 IN2 的功能driver_set_in3- 设置 IN3 的功能
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* \file
* \brief Driver Click example
*
* # Description
* This application offering a nine-pole spring terminal that can be used to implement and realize a wide range of different applications.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes GPIO driver and selects which inputs will be set in operation.
Bits from 0 to 6 (selectIN) select inputs from IN1 to IN7, respectively.
*
* ## Application Task
* Performs cycles in which selected inputs will be turned on for pulseWidth
delay time one by one. When one input is turned on, it will be turned off after desired delay time before the next input be turned on.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "driver.h"
// ------------------------------------------------------------------ VARIABLES
static driver_t driver;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
driver_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info(&logger, "---- Application Init ----");
// Click initialization.
driver_cfg_setup( &cfg );
DRIVER_MAP_MIKROBUS( cfg, MIKROBUS_1 );
driver_init( &driver, &cfg );
}
void application_task ( void )
{
uint8_t select_in;
uint8_t temp;
uint8_t count;
select_in = 0x7F;
temp = 1;
for (count = 0; count < 7; count++)
{
switch ( select_in & temp )
{
case 0x01 :
{
driver_set_in1( &driver, ENABLE_IN );
log_printf( &logger, "OUT1 enabled\r\n" );
Delay_ms( PULSE_WIDTH );
driver_set_in1( &driver, DISABLE_IN );
log_printf( &logger, "OUT1 disabled\r\n" );
break;
}
case 0x02 :
{
driver_set_in2( &driver, ENABLE_IN );
log_printf( &logger, "OUT2 enabled\r\n" );
Delay_ms( PULSE_WIDTH );
driver_set_in2( &driver, DISABLE_IN );
log_printf( &logger, "OUT2 disabled\r\n" );
break;
}
case 0x04 :
{
driver_set_in3( &driver, ENABLE_IN );
log_printf( &logger, "OUT3 enabled\r\n" );
Delay_ms( PULSE_WIDTH );
driver_set_in3( &driver, DISABLE_IN );
log_printf( &logger, "OUT3 disabled\r\n" );
break;
}
case 0x08 :
{
driver_set_in4( &driver, ENABLE_IN );
log_printf( &logger, "OUT4 enabled\r\n" );
Delay_ms( PULSE_WIDTH );
driver_set_in4( &driver, DISABLE_IN );
log_printf( &logger, "OUT4 disabled\r\n" );
break;
}
case 0x10 :
{
driver_set_in5( &driver, ENABLE_IN );
log_printf( &logger, "OUT5 enabled\r\n" );
Delay_ms( PULSE_WIDTH );
driver_set_in5( &driver, DISABLE_IN );
log_printf( &logger, "OUT5 disabled\r\n" );
break;
}
case 0x20 :
{
driver_set_in6( &driver, ENABLE_IN );
log_printf( &logger, "OUT6 enabled\r\n" );
Delay_ms( PULSE_WIDTH );
driver_set_in6( &driver, DISABLE_IN );
log_printf( &logger, "OUT6 disabled\r\n" );
break;
}
case 0x40 :
{
driver_set_in7( &driver, ENABLE_IN );
log_printf( &logger, "OUT7 enabled\r\n" );
Delay_ms( PULSE_WIDTH );
driver_set_in7( &driver, DISABLE_IN );
log_printf( &logger, "OUT7 disabled\r\n" );
break;
}
default :
{
break;
}
}
log_printf( &logger, "----------------------\r\n" );
temp <<= 1;
Delay_ms( 1000 );
}
}
void main ( void )
{
application_init( );
for ( ; ; )
{
application_task( );
}
}
// ------------------------------------------------------------------------ END