使用 TLC59401 和 STM32F410RB 实现平稳的舵机电机运动
面向机器人与自动化应用的高精度 16 通道舵机电机控制解决方案
已发布 7月 02, 2025
点击板
Servo 2 Click
开发板
Nucleo 64 with STM32F410RB MCU
编译器
NECTO Studio
微控制器单元
STM32F410RB
通过高分辨率 PWM 和强大安全功能,控制多达 16 个舵机电机,完美适用于机器人和自动化系统
A
A
硬件概览
它是如何工作的?
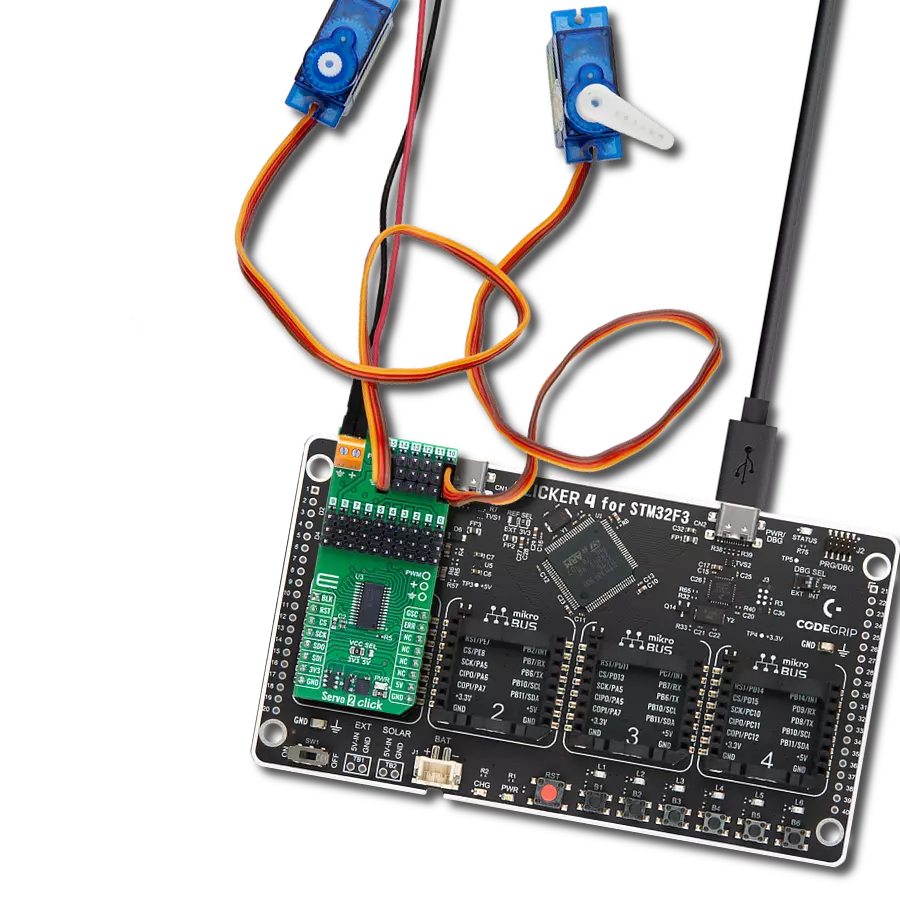
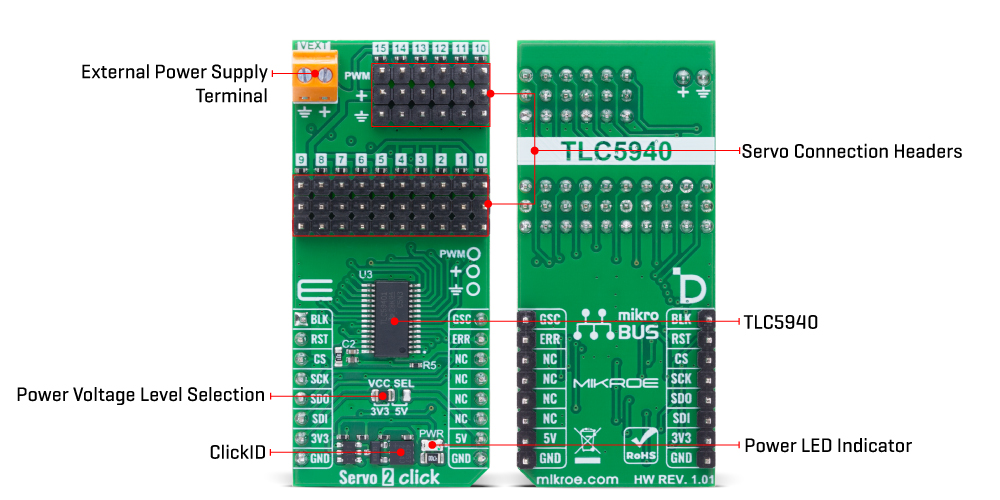
Servo 2 Click 基于德州仪器(Texas Instruments)的 TLC59401,这是一款 16 通道 LED 驱动器,采用高精度恒流输出架构,专为多通道控制设计。每个通道配备独立可编程的 12 位灰度 PWM 控制,支持每通道 4096 级脉宽调节,所有通道均可通过串行接口灵活访问与配置,实现高精度、同步控制。每通道的最大输出电流由一个外部电阻设定,在 Servo 2 Click 板上,该电阻(R7)设置为 330Ω,从而每个通道可输出约 120mA 电流。除了用于精密舵机控制,该板也非常适合驱动大电流 LED,适用于单色、多色、全
彩 LED 显示、广告牌与背光系统等对亮度控制和电流调节要求较高的场景。本 Click 板通过 4 线 SPI 接口与主控 MCU 通信,最高支持 30MHz 时钟频率,确保高速可靠的数据传输。除 SPI 引脚外,板上还包含多个辅助控制与状态引脚增强其功能性。其中,BLK 引脚可同时屏蔽所有输出通道 —— 当 BLK 设为高电平时,所有输出关闭,灰度计数器重置;设为低电平时,输出通道恢复工作,由内部 PWM 引擎控制。该设计支持多个通道并联使用,以提升总输出电流能力。负载电源通过 VEXT 端子供电,所有输出通道共
享该电压,支持最高 17V,兼容多种舵机与 LED 设备。此外,ERR 引脚通过两种集成功能提供故障检测:LED 开路检测(LOD)用于标记断开或损坏的 LED;热故障标志(TEF)用于提示过温状态,增强系统安全性与稳定性。Servo 2 Click 支持 3.3V 与 5V 逻辑电压,通过 VCC SEL 跳线选择,兼容不同电压等级的主控 MCU。板载软件库提供易于使用的函数及示例代码,便于快速集成与二次开发。
功能概述
开发板
Nucleo-64 搭载 STM32F410RB MCU 提供了一种经济高效且灵活的平台,供开发者探索新想法并原型设计他们的项目。该板利用 STM32 微控制器的多功能性,使用户能够为他们的项目选择最佳的性能与功耗平衡。它配备了 LQFP64 封装的 STM32 微控制器,并包含了如用户 LED(同时作为 ARDUINO® 信号)、用户和复位按钮,以及 32.768kHz 晶体振荡器用于精确的计时操作等基本组件。Nucleo-64 板设计考虑到扩展性和灵活性,它特有的 ARDUINO® Uno
V3 扩展连接器和 ST morpho 扩展引脚头,提供了对 STM32 I/O 的完全访问,以实现全面的项目整合。电源供应选项灵活,支持 ST-LINK USB VBUS 或外部电源,确保在各种开发环境中的适应性。该板还配备了一个具有 USB 重枚举功能的板载 ST-LINK 调试器/编程器,简化了编程和调试过程。此外,该板设计旨在简化高级开发,它的外部 SMPS 为 Vcore 逻辑供电提供高效支持,支持 USB 设备全速或 USB SNK/UFP 全速,并内置加密功能,提升了项目的功效
和安全性。通过外部 SMPS 实验的专用连接器、 用于 ST-LINK 的 USB 连接器以及 MIPI® 调试连接器,提供了更多的硬件接口和实验可能性。开发者将通过 STM32Cube MCU Package 提供的全面免费软件库和示例得到广泛支持。这些,加上与多种集成开发环境(IDE)的兼容性,包括 IAR Embedded Workbench®、MDK-ARM 和 STM32CubeIDE,确保了流畅且高效的开发体验,使用户能够充分利用 Nucleo-64 板在他们的项目中的能力。

微控制器概述
MCU卡片 / MCU

建筑
ARM Cortex-M4
MCU 内存 (KB)
128
硅供应商
STMicroelectronics
引脚数
64
RAM (字节)
32768
你完善了我!
配件
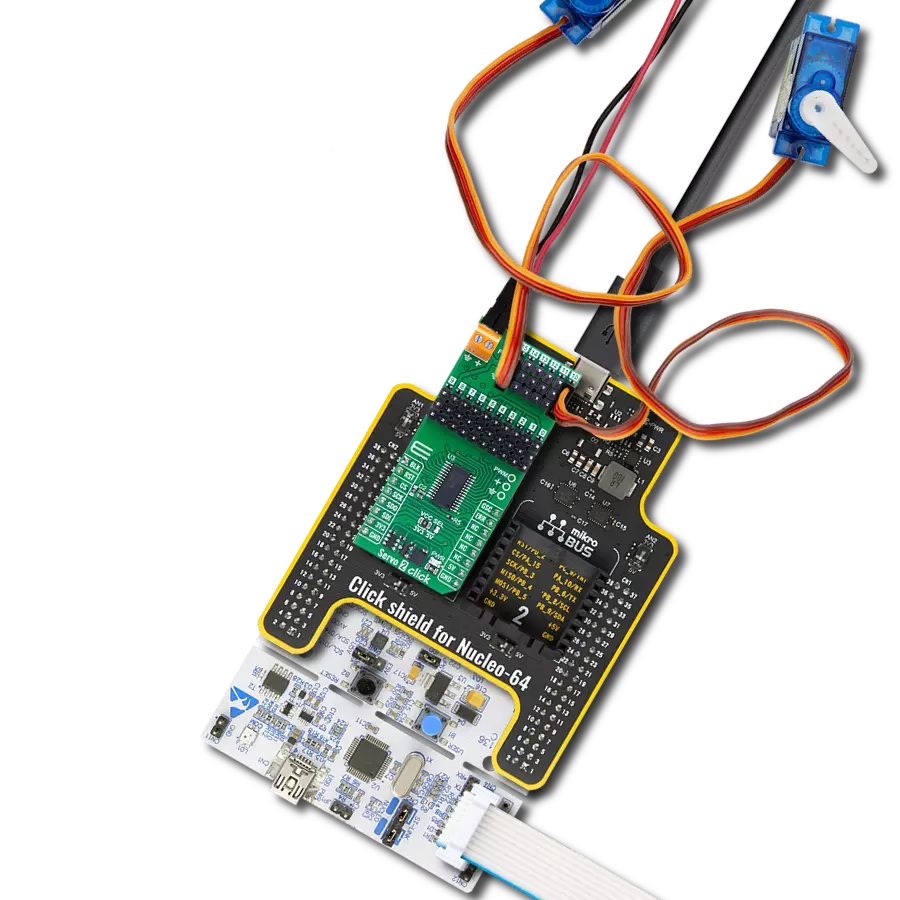
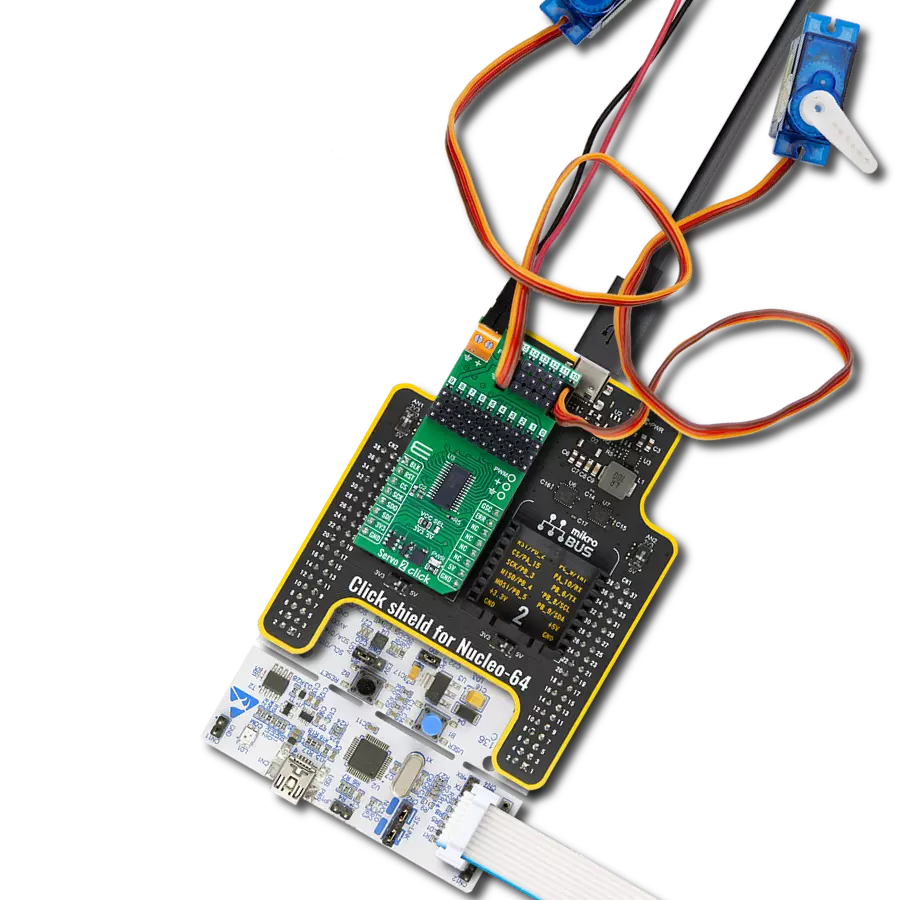
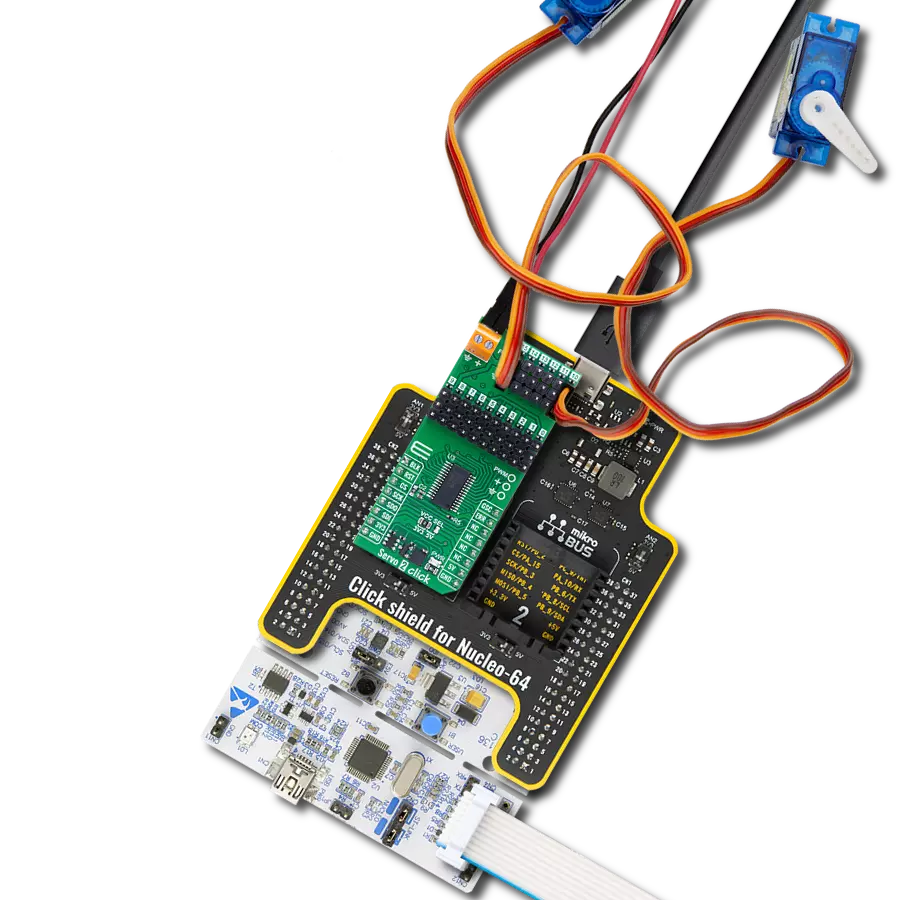
Click Shield for Nucleo-64 配备了两个专有的 mikroBUS™ 插座,使得所有的 Click board™ 设备都可以轻松地与 STM32 Nucleo-64 开发板连接。这样,Mikroe 允许其用户从不断增长的 Click boards™ 范围中添加任何功能,如 WiFi、GSM、GPS、蓝牙、ZigBee、环境传感器、LED、语音识别、电机控制、运动传感器等。您可以使用超过 1537 个 Click boards™,这些 Click boards™ 可以堆叠和集成。STM32 Nucleo-64 开发板基于 64 引脚封装的微控制器,采用 32 位 MCU,配备 ARM Cortex M4 处理器,运行速度为 84MHz,具有 512Kb Flash 和 96KB SRAM,分为两个区域,顶部区域代表 ST-Link/V2 调试器和编程器,而底部区域是一个实际的开发板。通过 USB 连接方便地控制和供电这些板子,以便直接对 Nucleo-64 开发板进行编程和高效调试,其中还需要额外的 USB 线连接到板子上的 USB 迷你接口。大多数 STM32 微控制器引脚都连接到了板子左右边缘的 IO 引脚上,然后连接到两个现有的 mikroBUS™ 插座上。该 Click Shield 还有几个开关,用于选择 mikroBUS™ 插座上模拟信号的逻辑电平和 mikroBUS™ 插座本身的逻辑电压电平。此外,用户还可以通过现有的双向电平转换器,使用任何 Click board™,无论 Click board™ 是否在 3.3V 或 5V 逻辑电压电平下运行。一旦将 STM32 Nucleo-64 开发板与我们的 Click Shield for Nucleo-64 连接,您就可以访问数百个工作于 3.3V 或 5V 逻辑电压电平的 Click boards™。

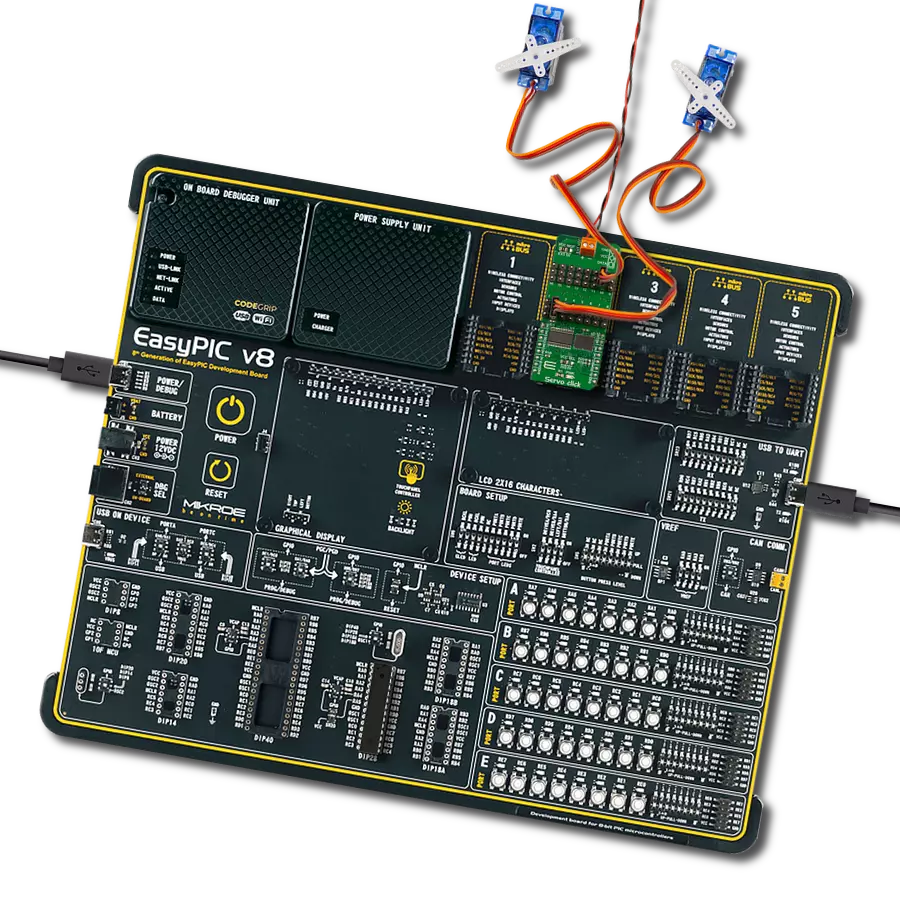
TowerPro 的 SG90 数字舵机是一款紧凑轻便的 9g 舵机,以其性能、可靠性与性价比兼具而广受认可。作为经典 SG90 模拟版的升级数字版本,该舵机具备更高的精度与响应速度,深受业余爱好者与专业用户的青睐。SG90 在 4.8V 工作电压下具备 1.8kg/cm 的堵转扭矩与 0.1 秒/60 度的高响应速度,非常适用于需要快速且精准运动控制的应用场景。其内部采用坚固的 POM(聚甲醛)齿轮组,确保运行顺畅且在中等负载下具备较长寿命。舵机支持 0°C 至 55°C 的工作温度范围,能在室内及部分受控环境中保持稳定性能。SG90 的死区宽度仅为 1μs,确保其具备极高的位置精度,是机器人、遥控模型和小型自动化系统等应用的理想选择。舵机配备 25cm 长的连接线,采用 JR 接头,兼容市面上主流的遥控接收器与微控制器平台,包括 JR 和 Futaba 系统。其尺寸为 23 × 12.2 × 29mm,结构紧凑,便于集成至空间受限的设计中。

使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
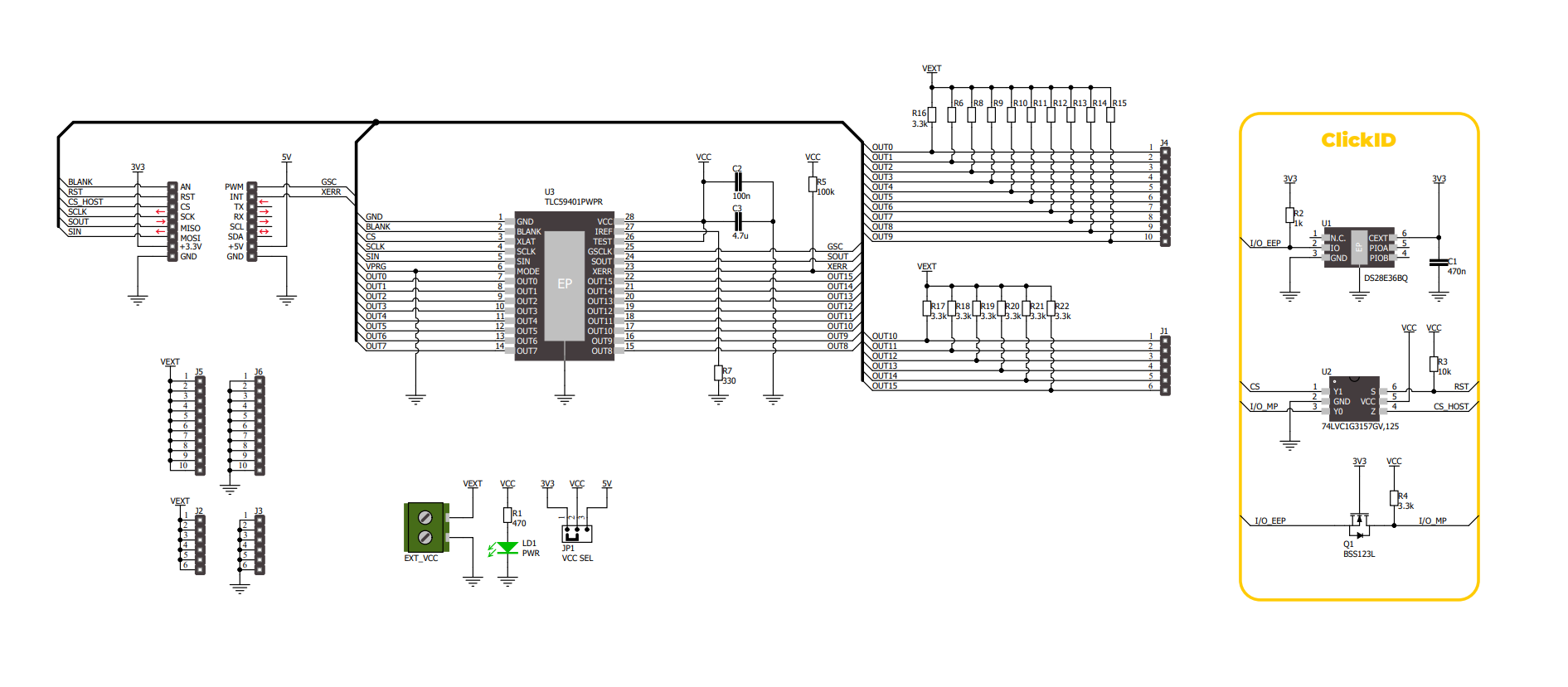
Click board™ 原理图
一步一步来
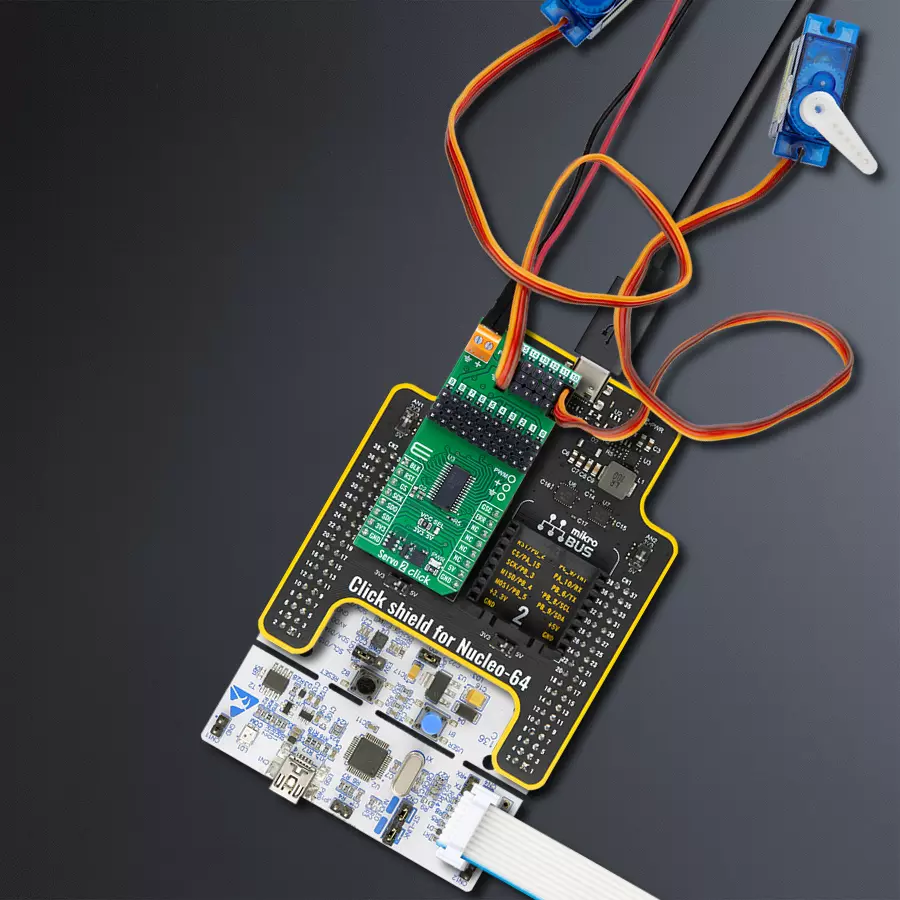
项目组装
从选择您的开发板和Click板™开始。以Nucleo 64 with STM32F410RB MCU作为您的开发板开始。













软件支持
库描述
Servo 2 Click 演示应用程序使用 NECTO Studio开发,确保与 mikroSDK 的开源库和工具兼容。该演示设计为即插即用,可与所有具有 mikroBUS™ 插座的 开发板、入门板和 mikromedia 板完全兼容,用于快速实现和测试。
示例描述
本示例演示如何使用 Servo 2 Click 板控制舵机电机的转角。该板可驱动多个舵机,本示例展示如何在预定义角度范围内同时调节所有连接舵机的角度。
关键功能:
servo2_cfg_setup- 配置对象初始化函数。servo2_init- 初始化函数。servo2_set_angle- 设置指定通道或全部通道的舵机角度。servo2_update_output- 通过写入设备,更新所有通道的 PWM 输出值。servo2_set_channel_pwm- 设置指定通道或全部通道的 PWM 输出。
应用初始化
初始化日志模块并配置 Servo 2 Click 板,建立 PWM 通信,设备准备就绪以控制舵机。
应用任务
将所有连接的舵机电机角度从最小值逐步增加到最大值,再逐步返回最小值,形成往复摆动动作。每次更新时都会记录当前角度。
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* @file main.c
* @brief Servo 2 Click example
*
* # Description
* This example demonstrates the use of the Servo 2 Click board for controlling the angle of servo motors.
* The board is capable of driving multiple servos, and the example illustrates how to change the angle
* of all connected servos simultaneously within a defined range.
*
* The demo application is composed of two sections:
*
* ## Application Init
* Initializes the logger module and configures the Servo 2 Click board. The PWM communication is
* established, and the device is prepared for controlling the servos.
*
* ## Application Task
* Gradually changes the angle of all connected servo motors from a minimum to a maximum value, and
* then back to the minimum, creating a sweeping motion. The current angle is logged during each update.
*
* @note
* Ensure that the servo motors are properly connected to the Servo 2 Click board and are compatible
* with the specified angle range such as the SG90 Micro Servo motors.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "servo2.h"
static servo2_t servo2;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
servo2_cfg_t servo2_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
servo2_cfg_setup( &servo2_cfg );
SERVO2_MAP_MIKROBUS( servo2_cfg, MIKROBUS_1 );
if ( PWM_ERROR == servo2_init( &servo2, &servo2_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
static uint8_t angle = SERVO2_ANGLE_MIN;
static int8_t step = 1;
log_printf( &logger, "All channels angle: %u\r\n\n", angle );
servo2_set_angle ( &servo2, SERVO2_CHANNEL_ALL, angle );
servo2_update_output ( &servo2 );
angle += step;
if ( angle > SERVO2_ANGLE_MAX )
{
step = -step;
angle += step;
}
else if ( angle < SERVO2_ANGLE_MIN )
{
step = -step;
angle += step;
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
额外支持
资源
类别:伺服