使用COM-09032和STM32L496AG实现精确自然的控制
提升您的HMI体验
已发布 7月 22, 2025
点击板
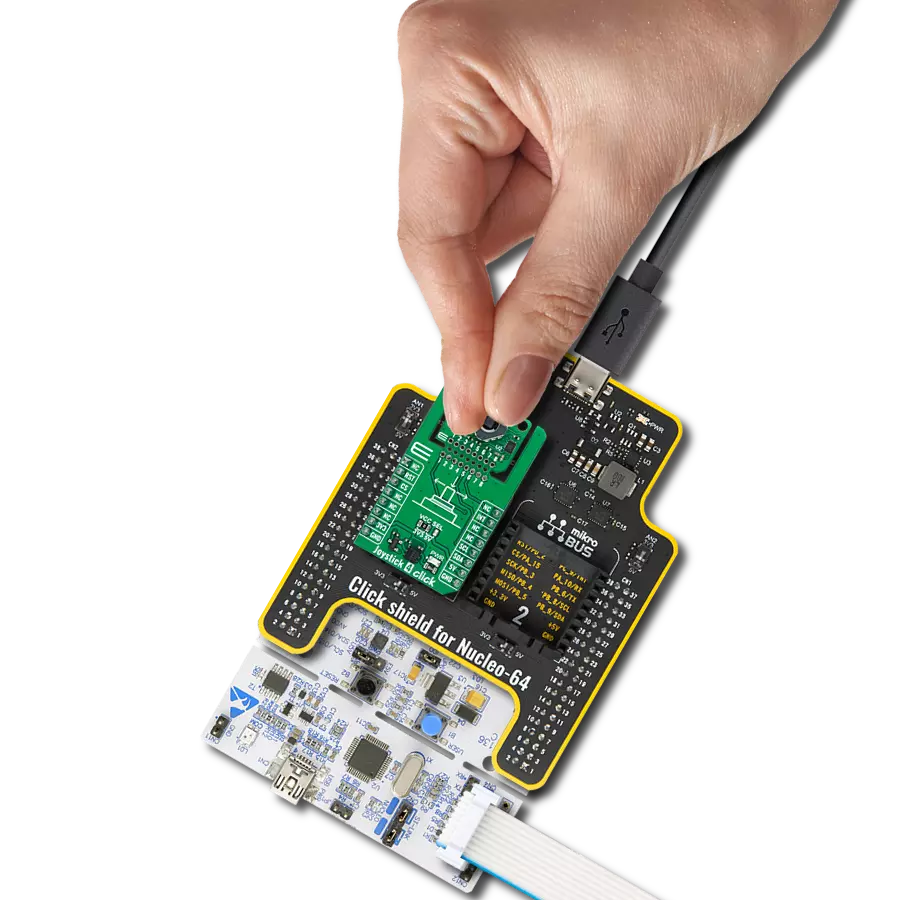
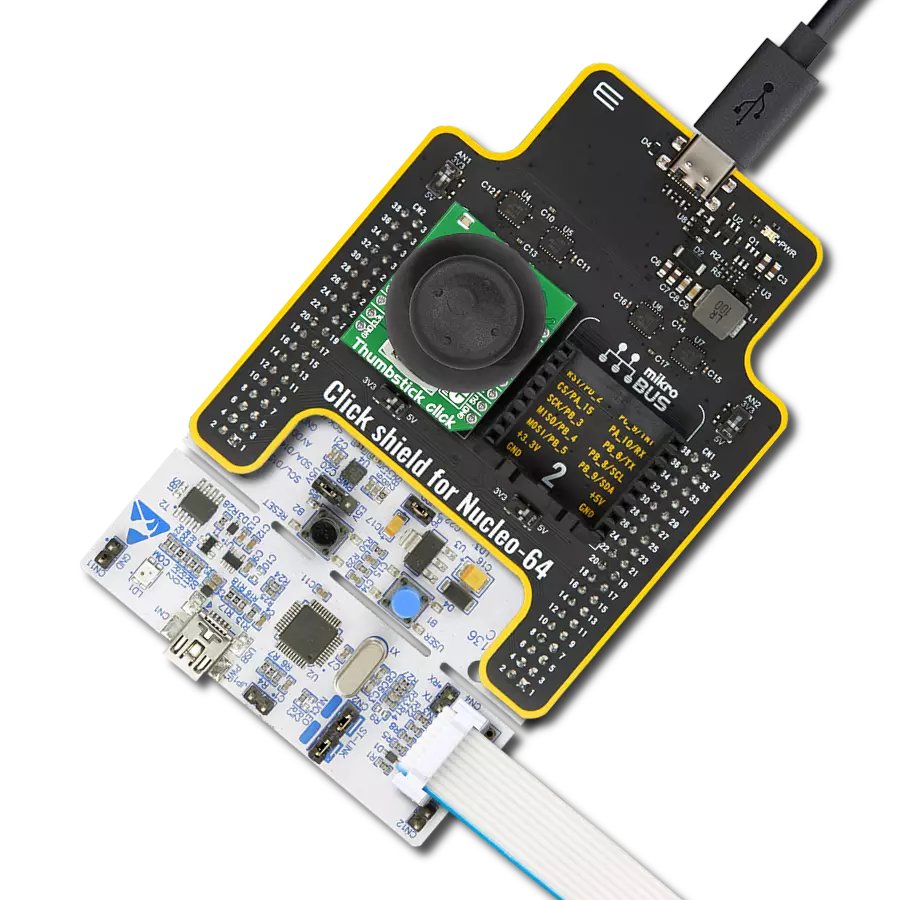
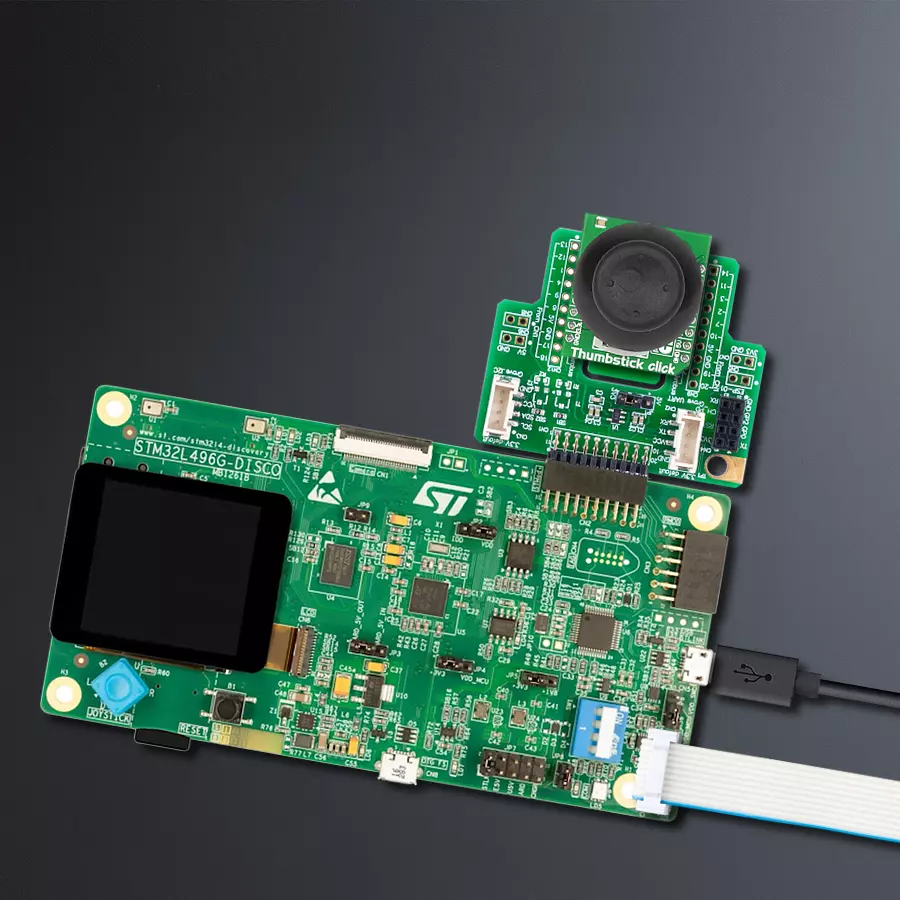
THUMBSTICK Click
开发板
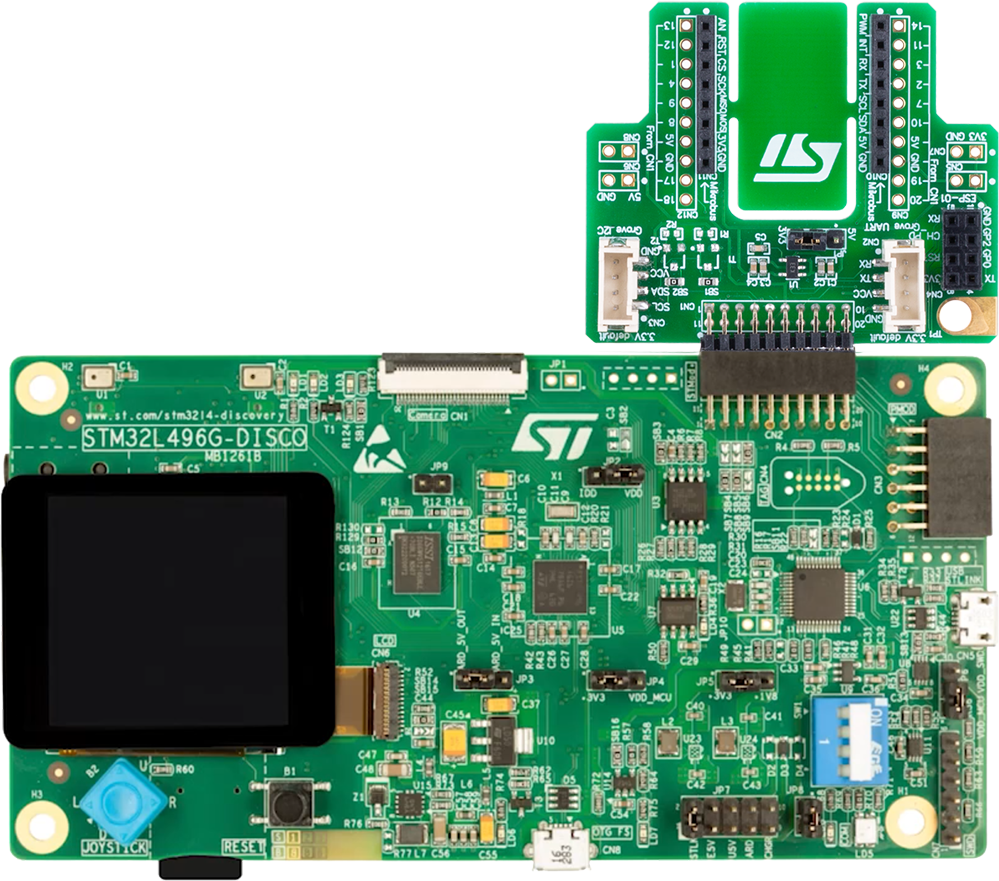
Discovery kit with STM32L496AG MCU
编译器
NECTO Studio
微控制器单元
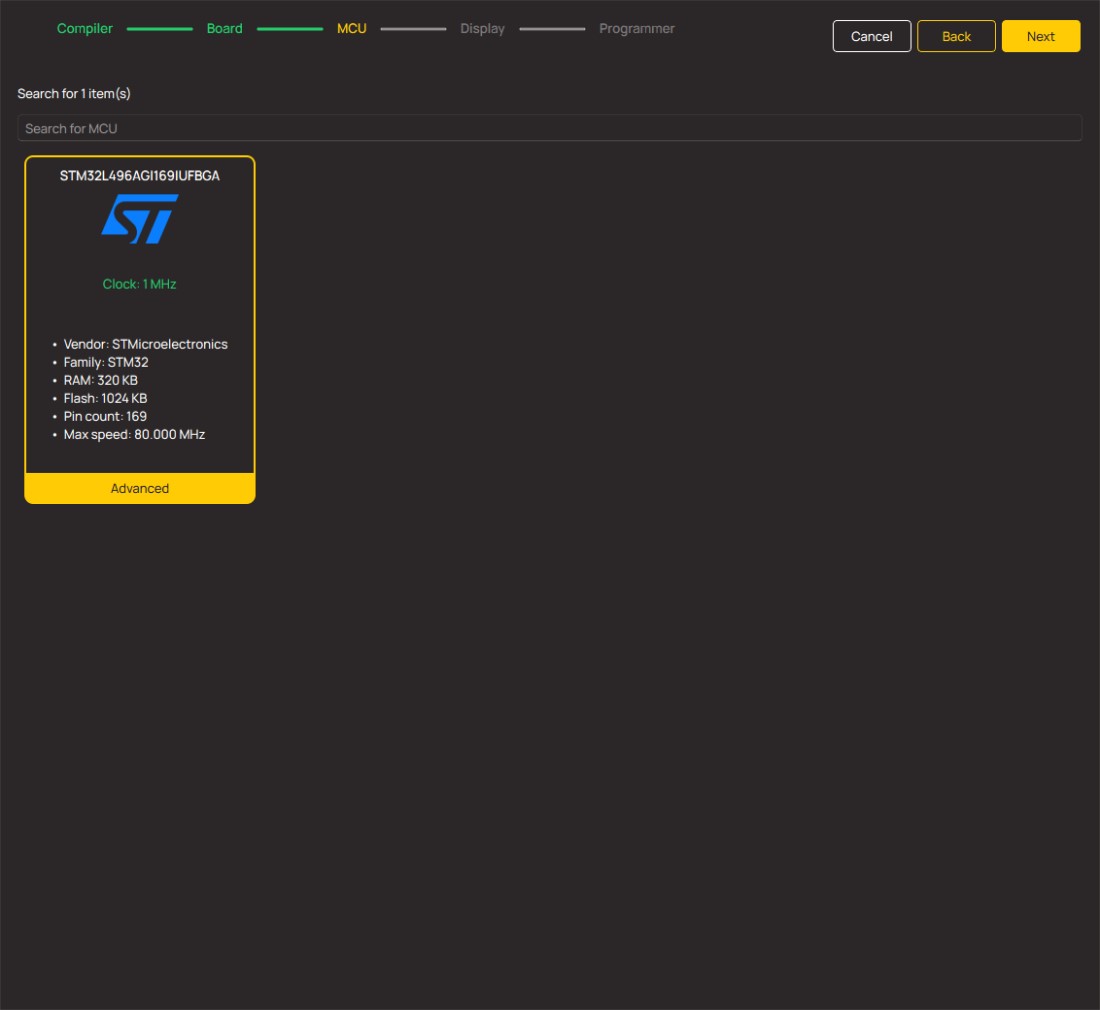
STM32L496AG
实现游戏控制台和手柄的精确模拟控制,增强游戏体验,或者满足需要精确控制输入的应用,如机器人学或无人机导航系统。
A
A
硬件概览
它是如何工作的?
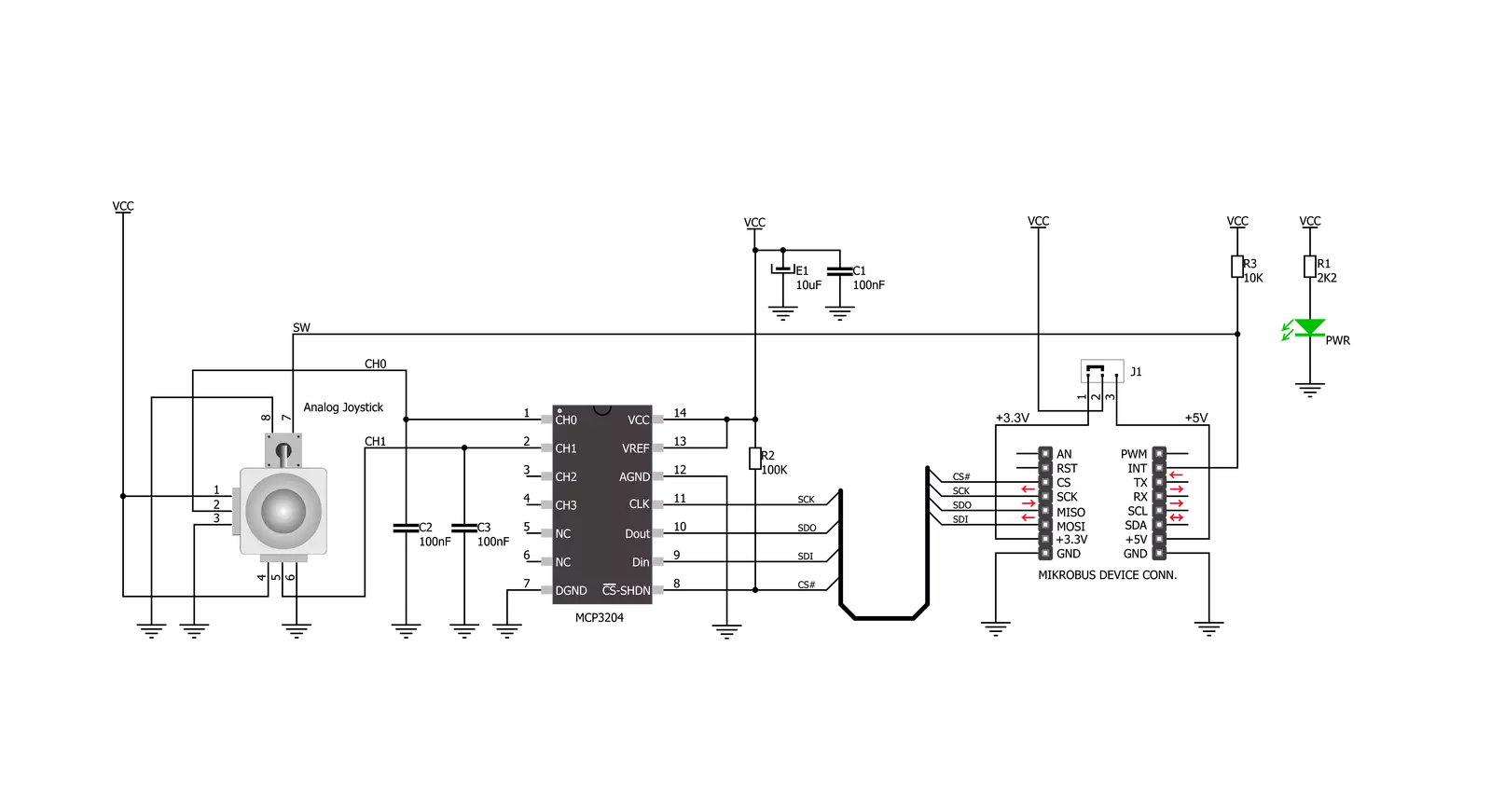
Thumbstick Click基于Sparkfun的COM-09032,这是一款高品质的2轴模拟型拇指杆。这种类型的拇指杆具有自动居中功能(弹簧回位),使其在释放时能够自动居中。它还包含一个舒适的杯状黑色旋钮/帽子,使其感觉像一个拇指杆,非常类似于流行游戏机(如PSP)手柄上使用的“模拟”摇杆。这个特性使它适用于众多应用作为人机界面。它由两个10kΩ电位器组成,一个用于上/下,另一个用于左/右方向,作为双可调电压分压器,在控制杆形式中提供2轴模拟输入。随
着拇指杆完全组装并工作,电压将随着拇指杆的移动 而变化。需要测量电位器阻值变化来读取拇指杆的物理位置。这就是为什么MCP3204,一款Microchip公司提供的具有高达100ksps转换速率的12位A/D转换器,通过与SPI协议兼容的简单串行接口连接拇指杆与mikroBUS™插座,以确定摇杆的X和Y的值。由于MCP3204的分辨率为12位,每个模拟通道(轴)上的值可以从0变化到4095。因此,如果杆在X轴上从一端移动到另一端,则X值将从0变化到4095,当沿Y轴移
动时也会发生类似的情况。拇指杆保持在中心位置的值大约为2048。此外,拇指杆具有一个按键功能,通过mikroBUS™插座的INT线向主机MCU发送中断信号。这个Click板™可以通过SMD跳线选择3.3V和5V逻辑电压电平运行。这样,3.3V和5V功能的MCU都可以正确使用通信线路。但是,Click板™配备了一个包含易于使用的功能和示例代码的库,可用作进一步开发的参考。

功能概述
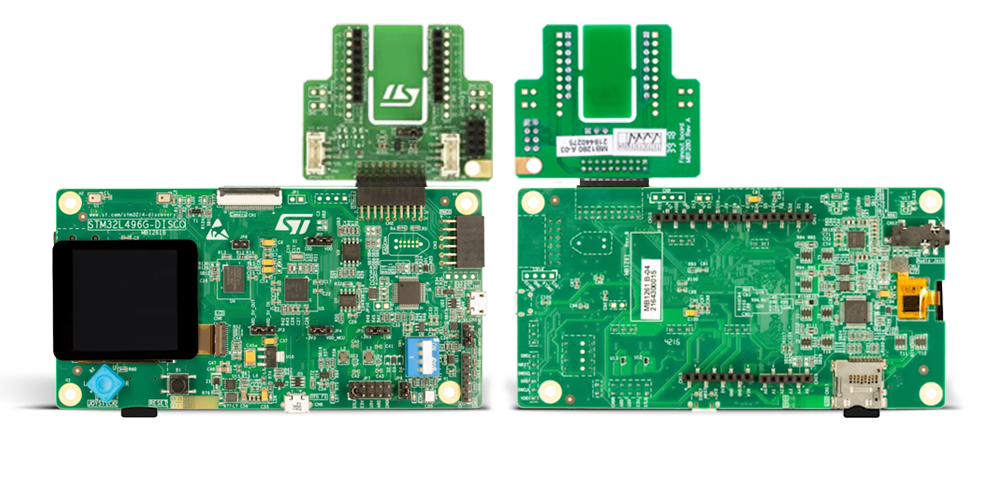
开发板
32L496GDISCOVERY Discovery 套件是一款功能全面的演示和开发平台,专为搭载 Arm® Cortex®-M4 内核的 STM32L496AG 微控制器设计。该套件适用于需要在高性能、先进图形处理和超低功耗之间取得平衡的应用,支持无缝原型开发,适用于各种嵌入式解决方案。STM32L496AG 采用创新的节能架构,集成
了扩展 RAM 和 Chrom-ART 图形加速器,在提升图形性能的同时保持低功耗,使其特别适用于音频处理、图形用户界面和实时数据采集等对能效要求较高的应用。为了简化开发流程,该开发板配备了板载 ST-LINK/V2-1 调试器/编程器,提供即插即用的调试和编程体验,使用户无需额外硬件即可轻松加载、调
试和测试应用程序。凭借低功耗特性、增强的内存能力以及内置调试工具,32L496GDISCOVERY 套件是开发先进嵌入式系统、实现高效能解决方案的理想选择。
微控制器概述
MCU卡片 / MCU

建筑
ARM Cortex-M4
MCU 内存 (KB)
1024
硅供应商
STMicroelectronics
引脚数
169
RAM (字节)
327680
使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
Click board™ 原理图
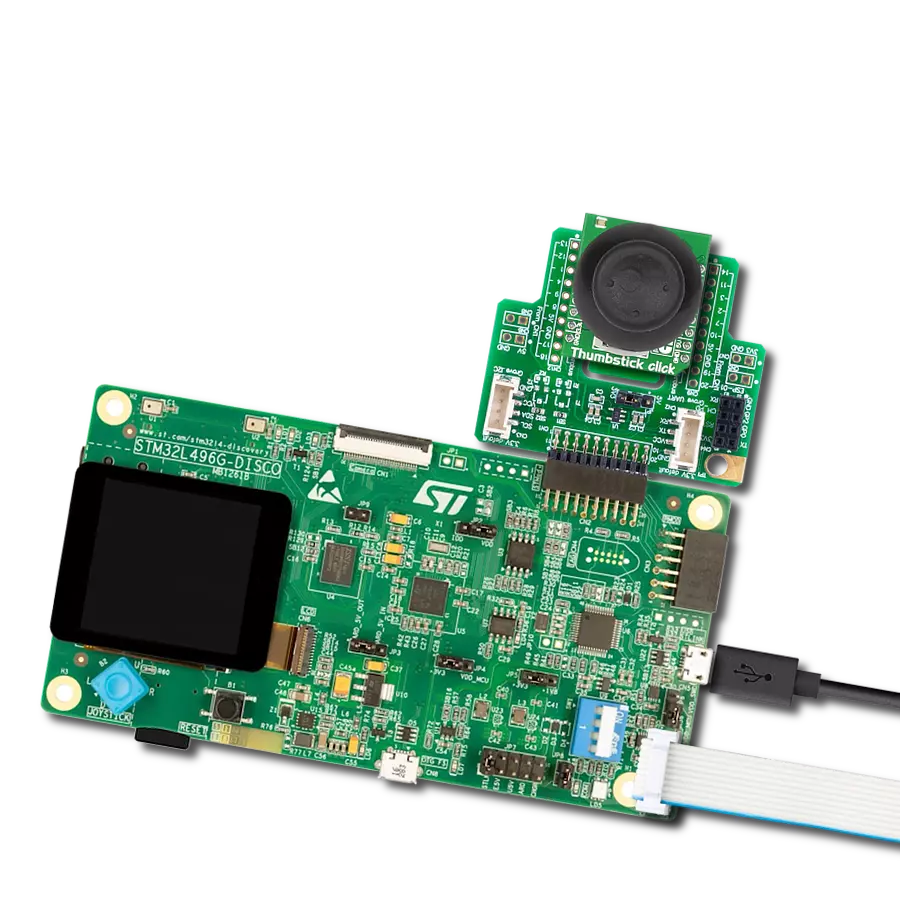
一步一步来
项目组装
从选择您的开发板和Click板™开始。以Discovery kit with STM32L496AG MCU作为您的开发板开始。










软件支持
库描述
这个库包含Thumbstick Click驱动的API。
关键函数:
thumbstick_button_state- 获取拇指杆按钮状态的函数thumbstick_get_position- 通过轴函数获取拇指杆位置
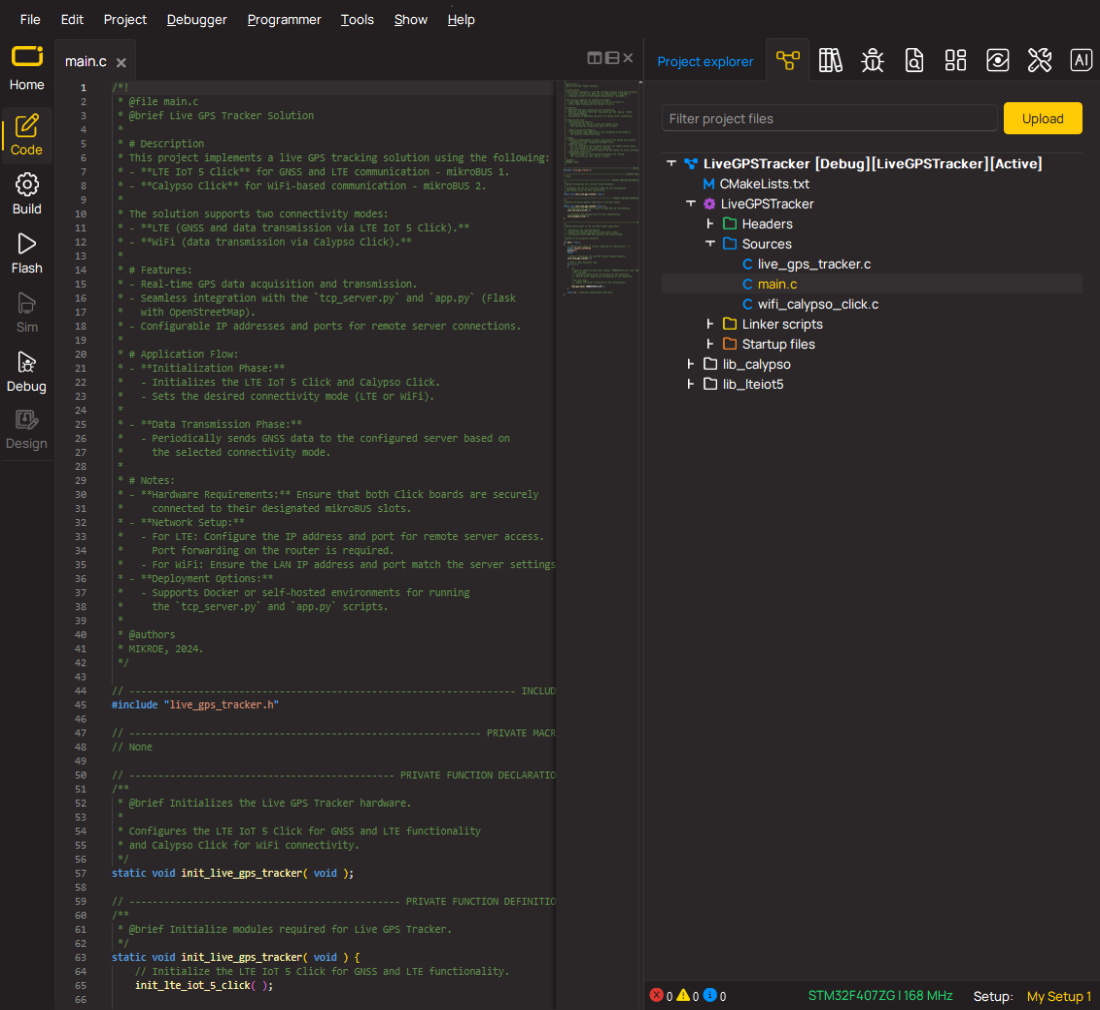
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* \file
* \brief Thumbstick Click example
*
* # Description
* The demo application shows Clickboard axis postioning and button pressed.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization of Click board's and log's objects.
*
* ## Application Task
* It reads the position of the thumbstick,
* - You will get data on log on every change of thumbstick axis position, or if you hold
* thumbstick in one postion it will repeat the same log when timer reaches timeout.
* - You will get data on log whenever you press thumbstick button and release it.
*
* \author Luka Filipovic
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "thumbstick.h"
// ------------------------------------------------------------------ VARIABLES
static thumbstick_t thumbstick;
static log_t logger;
static uint8_t old_butt_state;
static uint8_t button_state;
static thumbstick_position_t old_pos;
static thumbstick_position_t thumbstick_pos;
static uint16_t timer_cnt;
#define TIMER_FLAG 1000
static bool change_state;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
thumbstick_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
thumbstick_cfg_setup( &cfg );
THUMBSTICK_MAP_MIKROBUS( cfg, MIKROBUS_1 );
thumbstick_init( &thumbstick, &cfg );
thumbstick_set_sensitivity( POSTION_SENS_DEFAULT );
thumbstick_get_position( &thumbstick, &old_pos );
old_butt_state = thumbstick_button_state( &thumbstick );
timer_cnt = 0;
change_state = false;
}
void application_task ( void )
{
//Button pressed
button_state = thumbstick_button_state( &thumbstick );
if ( old_butt_state != button_state )
{
if ( button_state == THUMBSTICK_PRESS_BUTTON )
{
log_printf( &logger, ">> Button is pressed \r\n" );
Delay_ms ( 100 );
}
else
{
log_printf( &logger, ">> Button is released \r\n" );
Delay_ms ( 100 );
}
old_butt_state = button_state;
}
//Thumbstick postion
thumbstick_get_position( &thumbstick, &thumbstick_pos );
if ( ( old_pos.vertical != thumbstick_pos.vertical ) || ( timer_cnt >= TIMER_FLAG ) )
{
if ( thumbstick_pos.vertical == THUMBSTICK_POSITION_TOP )
{
log_printf( &logger, ">> TOP \r\n" );
change_state = true;
}
else if ( thumbstick_pos.vertical == THUMBSTICK_POSITION_BOTTOM )
{
log_printf( &logger, ">> BOTTOM \r\n" );
change_state = true;
}
old_pos = thumbstick_pos;
}
if ( (old_pos.horizontal != thumbstick_pos.horizontal ) || ( timer_cnt >= TIMER_FLAG ) )
{
if ( thumbstick_pos.horizontal == THUMBSTICK_POSITION_LEFT )
{
log_printf( &logger, ">> LEFT \r\n" );
change_state = true;
}
else if ( thumbstick_pos.horizontal == THUMBSTICK_POSITION_RIGHT )
{
log_printf( &logger, ">> RIGHT \r\n" );
change_state = true;
}
old_pos = thumbstick_pos;
}
if ( ( timer_cnt >= TIMER_FLAG ) || ( change_state == true ) )
{
timer_cnt = 0;
change_state = false;
}
timer_cnt++;
Delay_ms ( 1 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
额外支持
资源
类别:按钮/开关