使用IQS263B和STM32L496AG现代化用户体验
升级触控体验
已发布 7月 22, 2025
点击板
Cap Wheel 2 Click
开发板
Discovery kit with STM32L496AG MCU
编译器
NECTO Studio
微控制器单元
STM32L496AG
这种电容式解决方案旨在彻底改变用户交互,提供响应灵敏且直观的方式来通过简单触摸控制设备。
A
A
硬件概览
它是如何工作的?
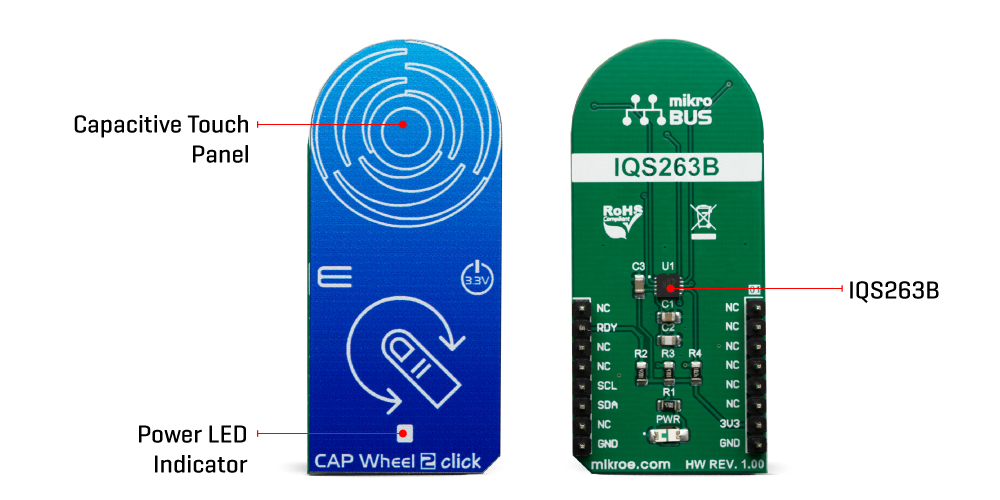
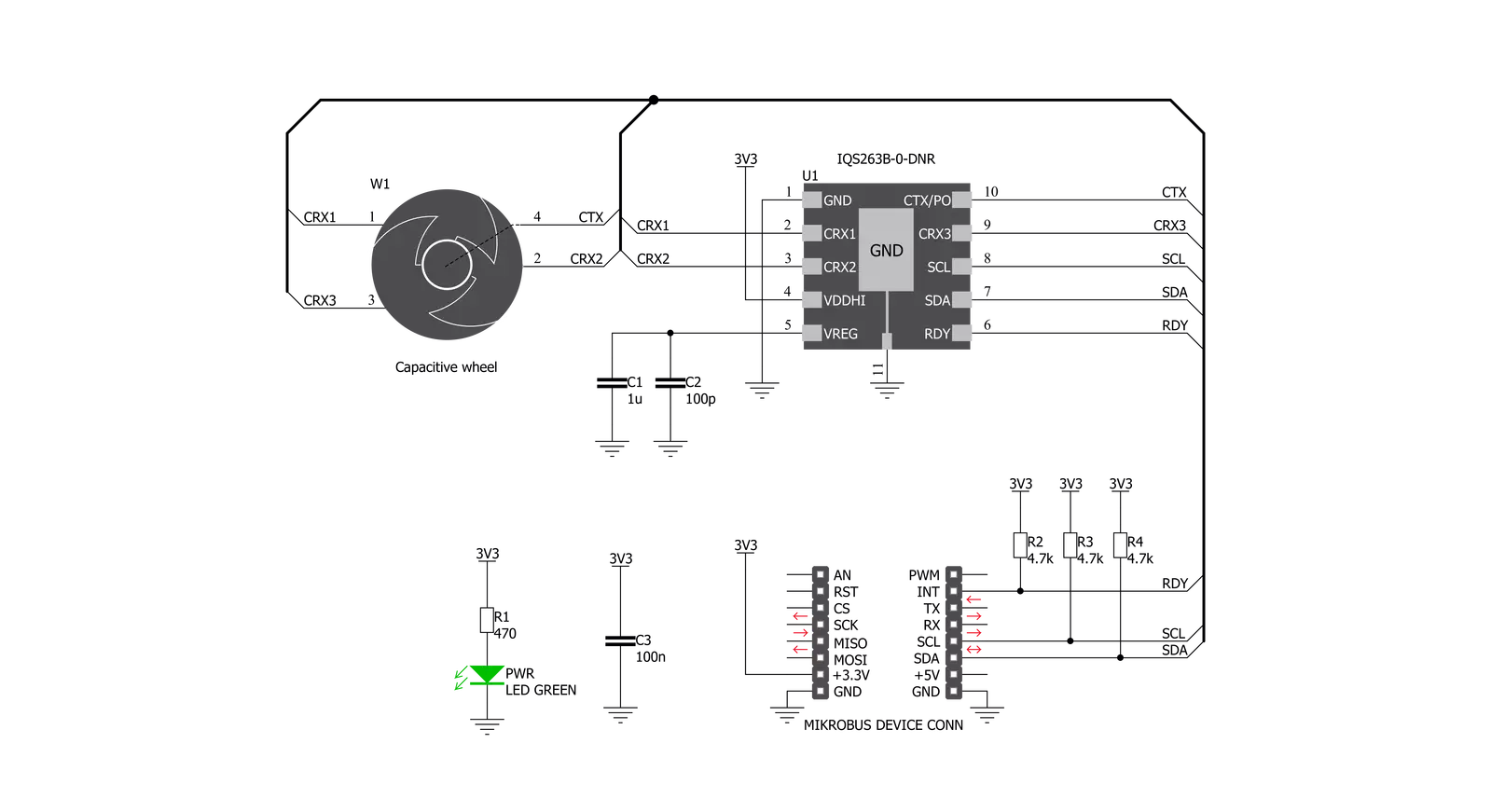
Cap Wheel 2 Click基于Azoteq的IQS263B ProxSense® IC,这是一个3通道的投影式(或自身)电容接近和触摸控制器。该IC具有高级功能,如自动漂移补偿、高达80Hz的报告速率、长距离接近范围、自动调整以获得最佳性能(ATI)和可配置的8位2/3通道滑块或3通道滚轮。这些功能使Cap Wheel 2 Click能够展现出可靠和准确的触摸检测。电容式触摸传感是基于检测到由外部物体影
响而引起的电容变化。传感器的电容,也称为天线,被测量和监测,如果在检测积分器处理后发生显著变化,则确认触摸事件。Cap Wheel 2 Click是根据这些要求设计的,电极是“自电容轮”形状。IQS263B IC通过3线(SDA、SCL和RDY)串行接口总线与主控制器进行接口连接,该接口与I2C™兼容,最大通信速度为400kbit/s。主MCU可以通过拉低RDY线来随时强制通信。通信将直接在
当前转换周期之后开始。如果看门狗定时器终止事件,设备将复位。在每个上电周期后,设备都会重新校准自身。这需要一些时间,因此在构建自定义应用程序时应考虑这一点。MikroElektronika提供库和演示应用程序,供未来设计参考。正如之前提到的,这个Click板™是I2C兼容的,并使用SCL、SDA和RDY引脚进行通信,路由到mikroBUS™上的SCL、SDA和INT引脚。
功能概述
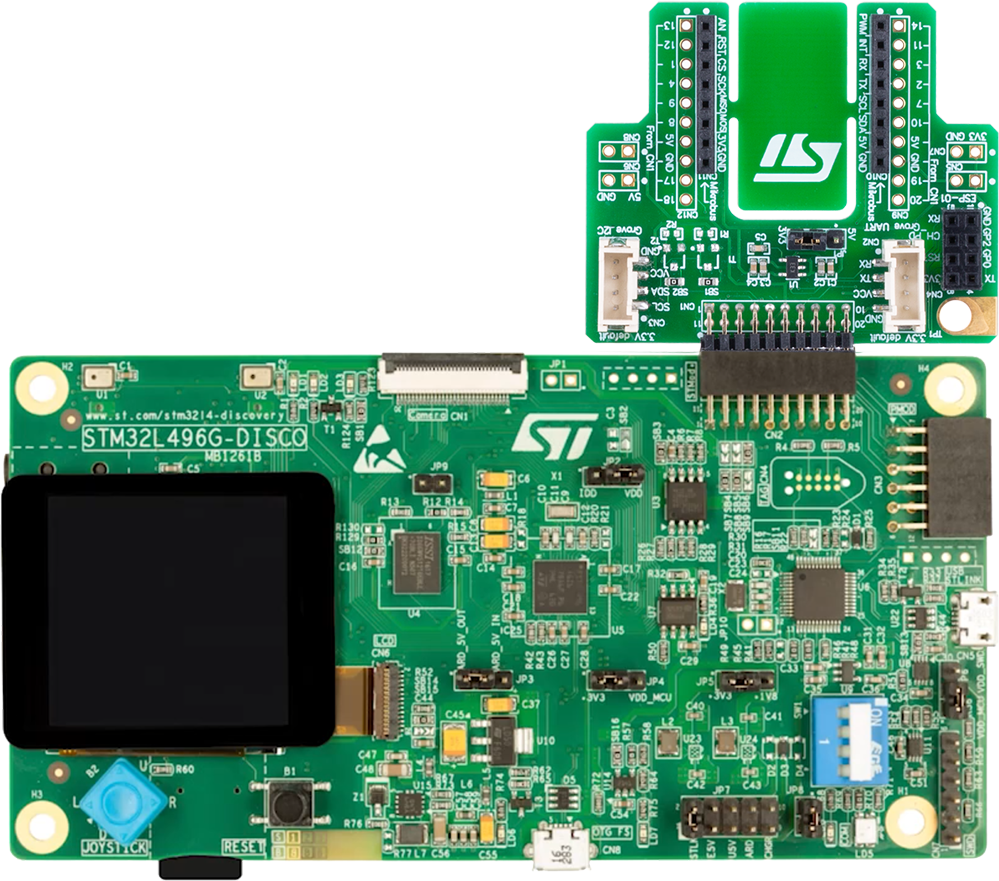
开发板
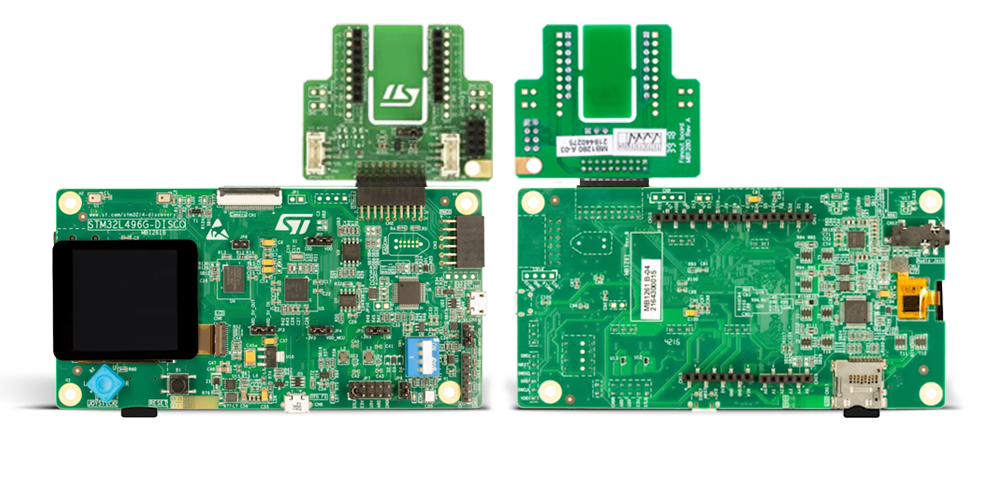
32L496GDISCOVERY Discovery 套件是一款功能全面的演示和开发平台,专为搭载 Arm® Cortex®-M4 内核的 STM32L496AG 微控制器设计。该套件适用于需要在高性能、先进图形处理和超低功耗之间取得平衡的应用,支持无缝原型开发,适用于各种嵌入式解决方案。STM32L496AG 采用创新的节能架构,集成
了扩展 RAM 和 Chrom-ART 图形加速器,在提升图形性能的同时保持低功耗,使其特别适用于音频处理、图形用户界面和实时数据采集等对能效要求较高的应用。为了简化开发流程,该开发板配备了板载 ST-LINK/V2-1 调试器/编程器,提供即插即用的调试和编程体验,使用户无需额外硬件即可轻松加载、调
试和测试应用程序。凭借低功耗特性、增强的内存能力以及内置调试工具,32L496GDISCOVERY 套件是开发先进嵌入式系统、实现高效能解决方案的理想选择。
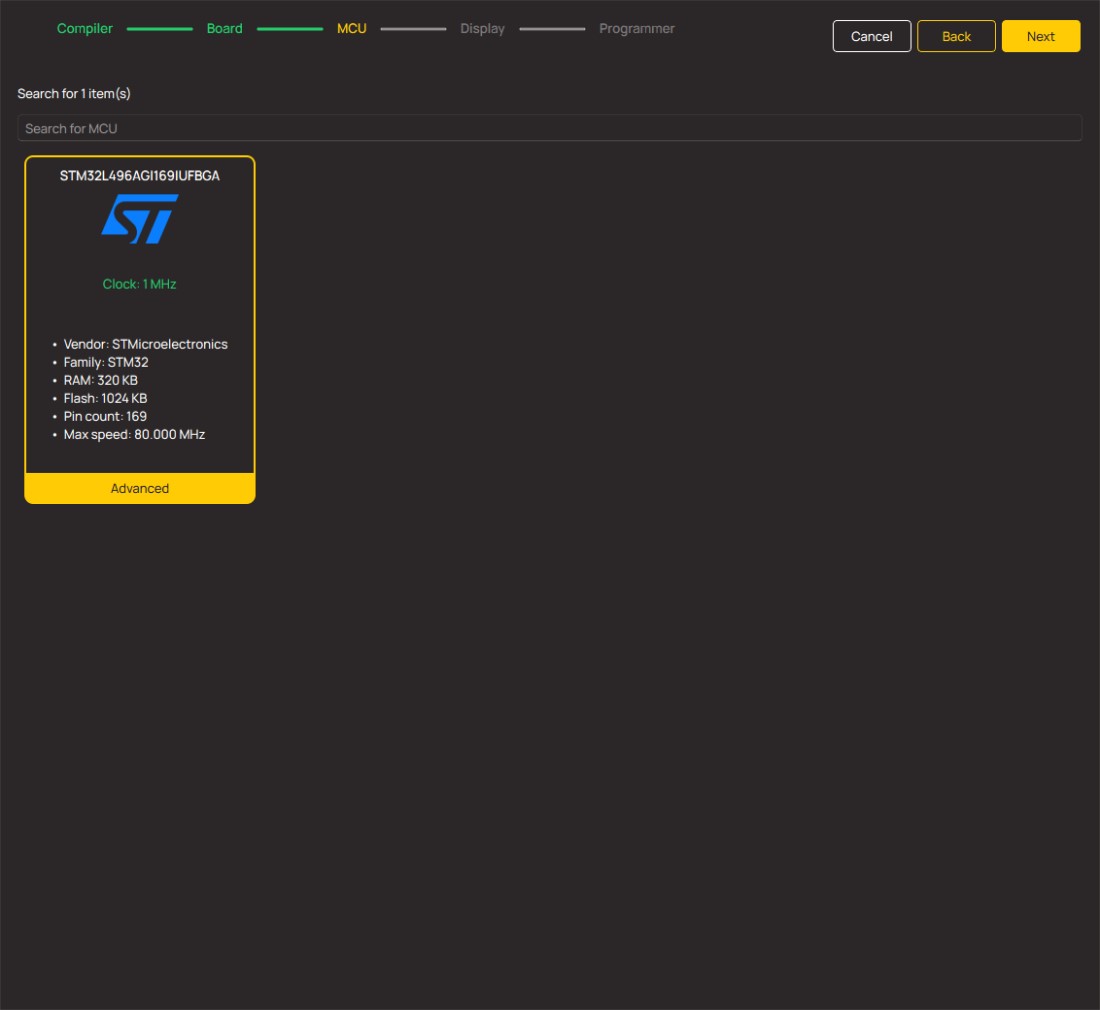
微控制器概述
MCU卡片 / MCU

建筑
ARM Cortex-M4
MCU 内存 (KB)
1024
硅供应商
STMicroelectronics
引脚数
169
RAM (字节)
327680
使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
Click board™ 原理图
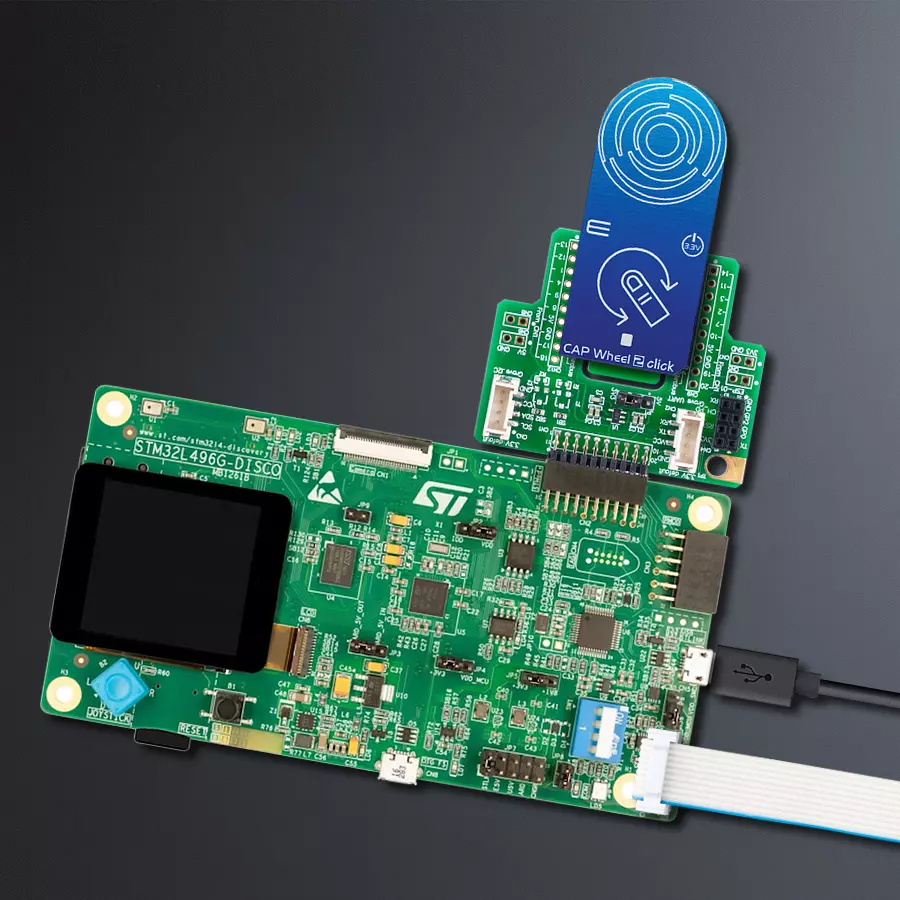
一步一步来
项目组装
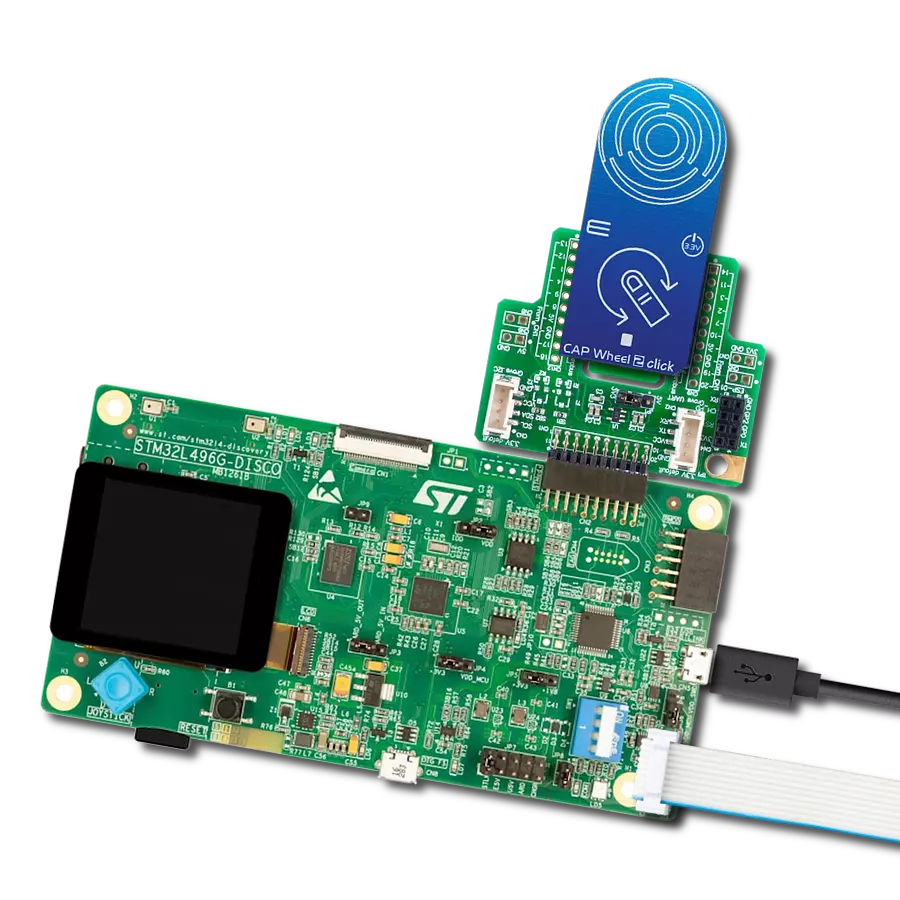
从选择您的开发板和Click板™开始。以Discovery kit with STM32L496AG MCU作为您的开发板开始。










软件支持
库描述
该库包含 这个库包含了Cap Wheel 2 Click 驱动程序的 API。
关键函数:
capwheel2_int_get- 此函数获取INT引脚的状态。capwheel2_wait_for_rdy- 此函数等待RDY引脚从高状态转变为低状态。
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* \file
* \brief CapWheel2 Click example
*
* # Description
* This example sets basic device configuration; Contains function for waiting RDY(INT) pin, function for getting RDY(INT) pin state,
* function for I2C read and write with waiting for RDY(INT) pin and without waiting for RDY(INT) pin.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes CAP Wheel 2 device
*
* ## Application Task
* Executes one of three 'capwheel2_get_xxx_task( )' functions
*
* Additional Functions :
*
* - capwheel2_error( ) - Logs error message and blocks code execution in endless while loop
* - capwheel2_get_channels_task( ) - Logs active channels in touch and halt bytes ( channels: CH0 - proximity channel, CH1, CH2, CH3 )
* - capwheel2_get_gesture_task( ) - Logs active gestures ( gestures: tap, touch, proximity )
* - capwheel2_get_channel_counts_task( ) - Logs channel count values for each channel
* - capwheel2_get_channels_touch( ) - Logs touch byte active channels ( exectuted by 'capwheel2_get_channels_task( )' function )
* - capwheel2_get_channels_halt( ) - Logs halt byte active channels ( exectuted by 'capwheel2_get_channels_task( )' function )
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "capwheel2.h"
// ------------------------------------------------------------------ VARIABLES
static capwheel2_t capwheel2;
static log_t logger;
static uint8_t data_buffer[ 30 ];
static uint16_t channel_0_counts;
static uint16_t channel_1_counts;
static uint16_t channel_2_counts;
static uint16_t channel_3_counts;
// ------------------------------------------------------- ADDITIONAL FUNCTIONS
void capwheel2_error( )
{
log_info( &logger, "> error : reset system" );
while( 1 );
}
void capwheel2_get_channels_touch( )
{
switch ( data_buffer[ 0 ] )
{
case 0x00 :
{
log_printf( &logger, "> | | | < \r\n" );
break;
}
case 0x01 :
{
log_printf( &logger, "> | | | CH0 < \r\n" );
break;
}
case 0x02 :
{
log_printf( &logger, "> | | CH1 | < \r\n" );
break;
}
case 0x03 :
{
log_printf( &logger, "> | | CH1 | CH0 < \r\n" );
break;
}
case 0x04 :
{
log_printf( &logger, "> | CH2 | | < \r\n" );
break;
}
case 0x05 :
{
log_printf( &logger, "> | CH2 | | CH0 < \r\n" );
break;
}
case 0x06 :
{
log_printf( &logger, "> | CH2 | CH1 | < \r\n" );
break;
}
case 0x07 :
{
log_printf( &logger, "> | CH2 | CH1 | CH0 < \r\n" );
break;
}
case 0x08 :
{
log_printf( &logger, "> CH3 | | | < \r\n" );
break;
}
case 0x09 :
{
log_printf( &logger, "> CH3 | | | CH0 < \r\n" );
break;
}
case 0x0A :
{
log_printf( &logger, "> CH3 | | CH1 | < \r\n" );
break;
}
case 0x0B :
{
log_printf( &logger, "> CH3 | | CH1 | CH0 < \r\n" );
break;
}
case 0x0C :
{
log_printf( &logger, "> CH3 | CH2 | | < \r\n" );
break;
}
case 0x0D :
{
log_printf( &logger, "> CH3 | CH2 | | CH0 < \r\n" );
break;
}
case 0x0E :
{
log_printf( &logger, "> CH3 | CH2 | CH1 | < \r\n" );
break;
}
case 0x0F :
{
log_printf( &logger, "> CH3 | CH2 | CH1 | CH0 < \r\n" );
break;
}
default :
{
break;
}
}
}
void capwheel2_get_channels_halt( )
{
switch ( data_buffer[ 1 ] )
{
case 0x00 :
{
log_printf( &logger, "> | | | <\r\n" );
break;
}
case 0x01 :
{
log_printf( &logger, "> | | | CH0 <\r\n" );
break;
}
case 0x02 :
{
log_printf( &logger, "> | | CH1 | <\r\n" );
break;
}
case 0x03 :
{
log_printf( &logger, "> | | CH1 | CH0 <\r\n" );
break;
}
case 0x04 :
{
log_printf( &logger, "> | CH2 | | <\r\n" );
break;
}
case 0x05 :
{
log_printf( &logger, "> | CH2 | | CH0 <\r\n" );
break;
}
case 0x06 :
{
log_printf( &logger, "> | CH2 | CH1 | <\r\n" );
break;
}
case 0x07 :
{
log_printf( &logger, "> | CH2 | CH1 | CH0 <\r\n" );
break;
}
case 0x08 :
{
log_printf( &logger, "> CH3 | | | <\r\n" );
break;
}
case 0x09 :
{
log_printf( &logger, "> CH3 | | | CH0 <\r\n" );
break;
}
case 0x0A :
{
log_printf( &logger, "> CH3 | | CH1 | <\r\n" );
break;
}
case 0x0B :
{
log_printf( &logger, "> CH3 | | CH1 | CH0 <\r\n" );
break;
}
case 0x0C :
{
log_printf( &logger, "> CH3 | CH2 | | <\r\n" );
break;
}
case 0x0D :
{
log_printf( &logger, "> CH3 | CH2 | | CH0 <\r\n" );
break;
}
case 0x0E :
{
log_printf( &logger, "> CH3 | CH2 | CH1 | <\r\n" );
break;
}
case 0x0F :
{
log_printf( &logger, "> CH3 | CH2 | CH1 | CH0 <\r\n" );
break;
}
default :
{
break;
}
}
}
void capwheel2_get_channels_task( )
{
if ( capwheel2_i2c_read_wait( &capwheel2, CAPWHEEL2_TOUCH_BYTES, &data_buffer[ 0 ], 2 ) )
{
capwheel2_error( );
}
log_printf( &logger, " ");
log_printf( &logger, "> TOUCH BYTES <\r\n" );
log_printf( &logger, "> HALT BYTES <\r\n" );
capwheel2_get_channels_touch( );
capwheel2_get_channels_halt( );
Delay_ms ( 150 );
}
void capwheel2_get_gesture_task( )
{
if ( capwheel2_i2c_read_wait( &capwheel2, CAPWHEEL2_SYS_FLAGS, &data_buffer[ 0 ], 2 ) )
{
capwheel2_error( );
}
if ( ( data_buffer[ 1 ] & CAPWHEEL2_TAP_MASK ) == CAPWHEEL2_TAP_MASK)
{
log_printf( &logger, "> TAP\r\n" );
}
else if ( ( data_buffer[ 1 ] & CAPWHEEL2_TOUCH_MASK ) == CAPWHEEL2_TOUCH_MASK)
{
log_printf( &logger, "> TOUCH\r\n" );
}
else if ( ( data_buffer[ 1 ] & CAPWHEEL2_PROX_MASK ) == CAPWHEEL2_PROX_MASK)
{
log_printf( &logger, "> PROX\r\n" );
}
Delay_ms ( 800 );
}
void capwheel2_get_channel_counts_task( )
{
if (capwheel2_i2c_read_wait( &capwheel2, CAPWHEEL2_COUNTS, &data_buffer[ 0 ], 10))
{
capwheel2_error( );
}
channel_0_counts = data_buffer[ 3 ];
channel_0_counts <<= 8;
channel_0_counts |= data_buffer[ 2 ];
channel_1_counts = data_buffer[ 5 ];
channel_1_counts <<= 8;
channel_1_counts |= data_buffer[ 4 ];
channel_2_counts = data_buffer[ 7 ];
channel_2_counts <<= 8;
channel_2_counts |= data_buffer[ 6 ];
channel_3_counts = data_buffer[ 9 ];
channel_3_counts <<= 8;
channel_3_counts |= data_buffer[ 8 ];
log_printf( &logger, "> Channel 0 counts : %u \r\n", channel_0_counts );
log_printf( &logger, "> Channel 1 counts : %u \r\n", channel_1_counts );
log_printf( &logger, "> Channel 2 counts : %u \r\n", channel_2_counts );
log_info( &logger, " ");
Delay_ms ( 150 );
}
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
capwheel2_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
capwheel2_cfg_setup( &cfg );
CAPWHEEL2_MAP_MIKROBUS( cfg, MIKROBUS_1 );
capwheel2_init( &capwheel2, &cfg );
}
void application_task ( void )
{
capwheel2_get_channels_task( );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
额外支持
资源
类别:电容