使用TB6575FNG和PIC18F45K50释放无刷电机的潜力
无缝运动,无限动力
已发布 6月 24, 2024
点击板
Brushless Click
开发板
EasyPIC v8
编译器
NECTO Studio
微控制器单元
PIC18F45K50
用可靠高效的运动控制技术赋能机器人、无人机和自动化应用。
A
A
硬件概览
它是如何工作的?
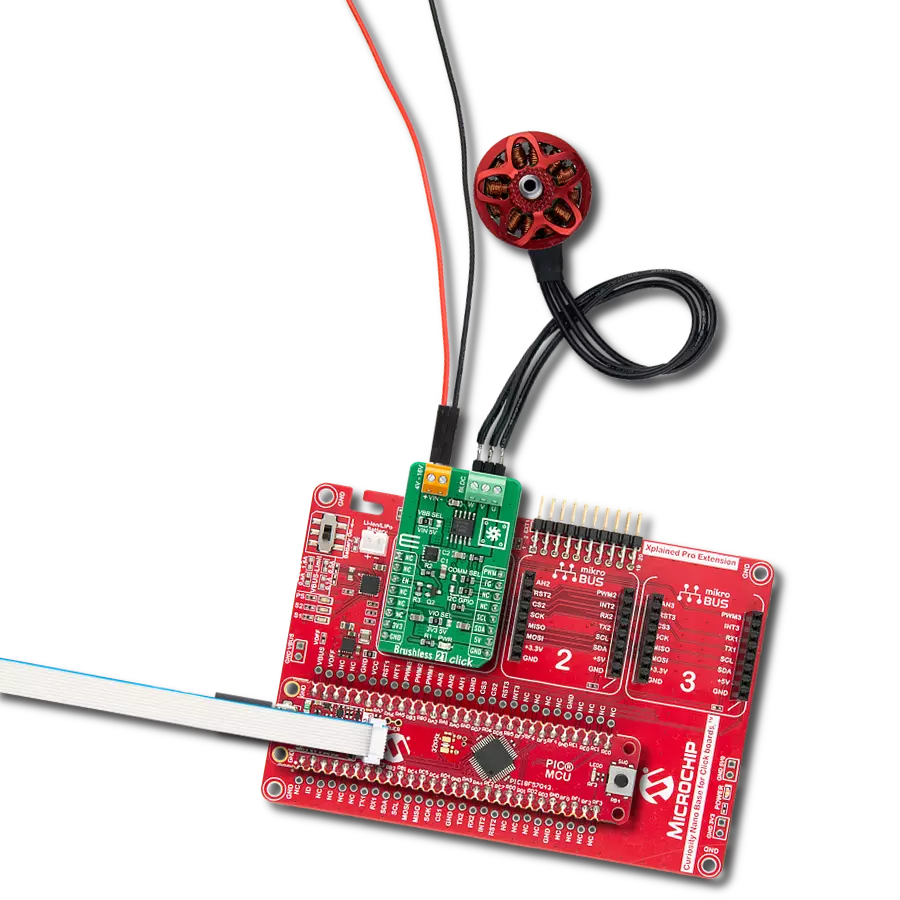
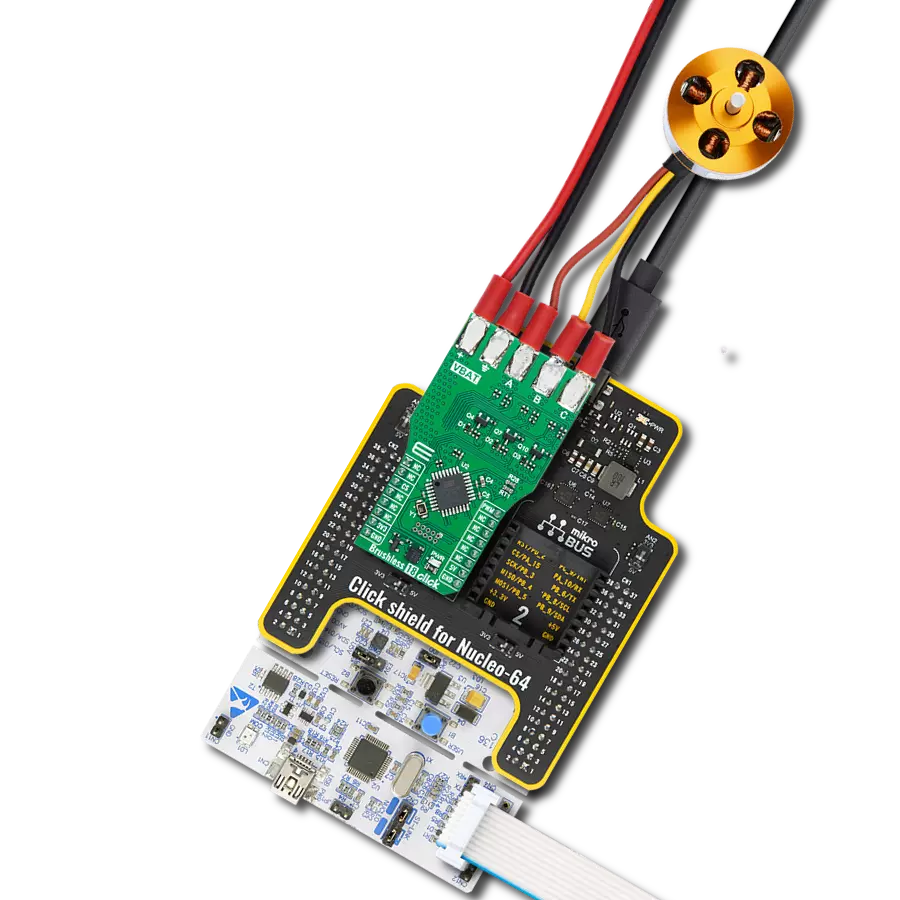
Brushless Click基于Toshiba Semiconductor的TB6575FNG,这是一款用于三相全波无刷直流(BLDC)电机的PWM无传感器控制器。它基于PWM斩波驱动。在接收到模拟电压命令输入后,转子被对准到已知位置,然后以强制换相模式启动旋转,从而获取背电动势。为了在无传感器驱动下驱动无刷直流电机,基于背电动势感测生成一个自然换相的PWM信号。当每个相电压(包括背电动势)的极性信号应用到位置信号输入时,这个自然换相PWM信号会自动从强制换相PWM信号切换过来。板载两种类型的MOSFET芯片分别开关输出的ON和OFF。这控制了施加在电机上的电压水平,确定了电机轴的速度和旋转。它们是Si4497,一种P通道30V MOSFET,
和Si4154,一种N通道40V MOSFET,均来自Vishay。Brushless click理论上可以输出更高的电流;但在这种情况下,MOSFET芯片必须用外部散热器冷却。要连接外部直流电源,有一个VBAT螺钉端子。标有BLDC(GND、U、V、W)的螺钉端子是用于连接外部电机的相。作为TB6575FNG的位置传感输入,这个Click板使用的是LM2903,来自STMicroelectronics的低功率双电压比较器。为了感测,该比较器使用所有电机驱动器输出的电压。作为占空比控制输入,这个Click板使用的是MCP6281,一款来自Microchip的轨到轨运算放大器。这个OpAmp作为输入使用mikroBUS™插座的PWM信号。Brushless Click仅使用PWM信号作为与主机MCU的连
接,通过mikroBUS™插座提供信号到电机驱动器的WAVE位置感测输入。旋转速度感测输出通过mikroBUS™插座的INT引脚进行监控。要设置旋转方向,您可以在DIR引脚上使用逻辑高和低状态,高表示反向,低表示正向旋转。通过电阻分压器,VSN引脚可以监测电池电压。位置检测与IC生成的PWM信号同步。当IC用于高速电机时,可能会出现相对于PWM频率的位置检测误差。检测在PWM信号的下降沿执行。当引脚电压超过参考电压时,将识别错误。这个Click板™只能使用5V逻辑电压电平进行操作。在使用具有不同逻辑电平的MCU之前,板必须执行适当的逻辑电压电平转换。它配备了一个包含函数和示例代码的库,可作为进一步开发的参考。

功能概述
开发板
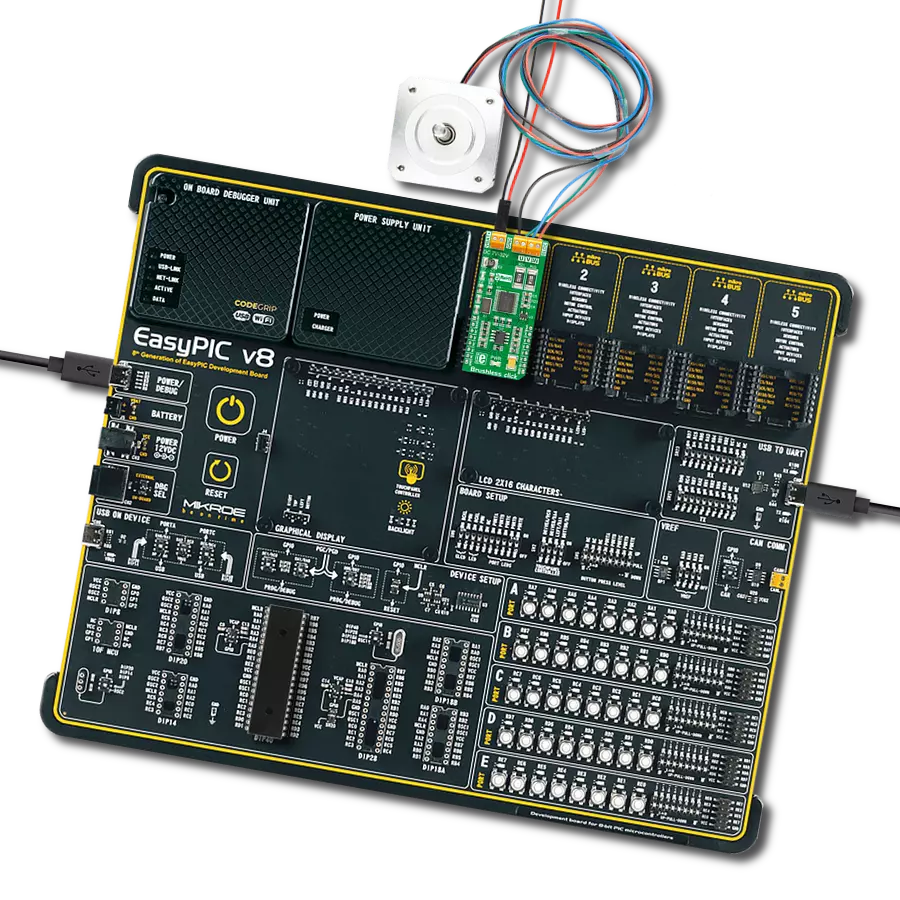
EasyPIC v8 是一款专为快速开发嵌入式应用的需求而特别设计的开发板。它支持许多高引脚计数的8位PIC微控制器,来自Microchip,无论它们的引脚数量如何,并且具有一系列独特功能,例如首次集成的调试器/程序员。开发板布局合理,设计周到,使得最终用户可以在一个地方找到所有必要的元素,如开关、按钮、指示灯、连接器等。得益于创新的制造技术,EasyPIC v8 提供了流畅而沉浸式的工作体验,允许在任何情况下、任何地方、任何时候都能访问。
EasyPIC v8 开发板的每个部分都包含了使同一板块运行最高效的必要组件。除了先进的集成CODEGRIP程 序/调试模块,该模块提供许多有价值的编程/调试选项和与Mikroe软件环境的无缝集成外,该板还包括一个干净且调节过的开发板电源供应模块。它可以使用广泛的外部电源,包括电池、外部12V电源供应和通过USB Type-C(USB-C)连接器的电源。通信选项如USB-UART、USB DEVICE和CAN也包括在内,包括 广受好评的mikroBUS™标准、两种显示选项(图形和
基于字符的LCD)和几种不同的DIP插座。这些插座覆盖了从最小的只有八个至四十个引脚的8位PIC MCU的广泛范围。EasyPIC v8 是Mikroe快速开发生态系统的一个组成部分。它由Mikroe软件工具原生支持,得益于大量不同的Click板™(超过一千块板),其数量每天都在增长,它涵盖了原型制作和开发的许多方面。

微控制器概述
MCU卡片 / MCU

建筑
PIC
MCU 内存 (KB)
32
硅供应商
Microchip
引脚数
40
RAM (字节)
2048
你完善了我!
配件
配备霍尔传感器的无刷直流(BLDC)电机代表了42BLF电机系列的高性能电机。这款电机采用星形配置,霍尔效应角为120°,确保了精确可靠的性能。具有47mm的紧凑电机长度和仅0.29kg的轻量设计,这款BLDC电机被设计用来满足您的需求。在额定电压24VDC和4000 ± 10% RPM的速度范围内无缝运行,这款电机提供持续可靠的动力。它在-20到+50°C的正常操作温度范围内表现出色,以1.9A的额定电流保持高效率。此外,这款产品与所有需要带霍尔传感器的无刷Click板以及需要BLDC电机的板件无缝集成。

使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
Click board™ 原理图

一步一步来
项目组装

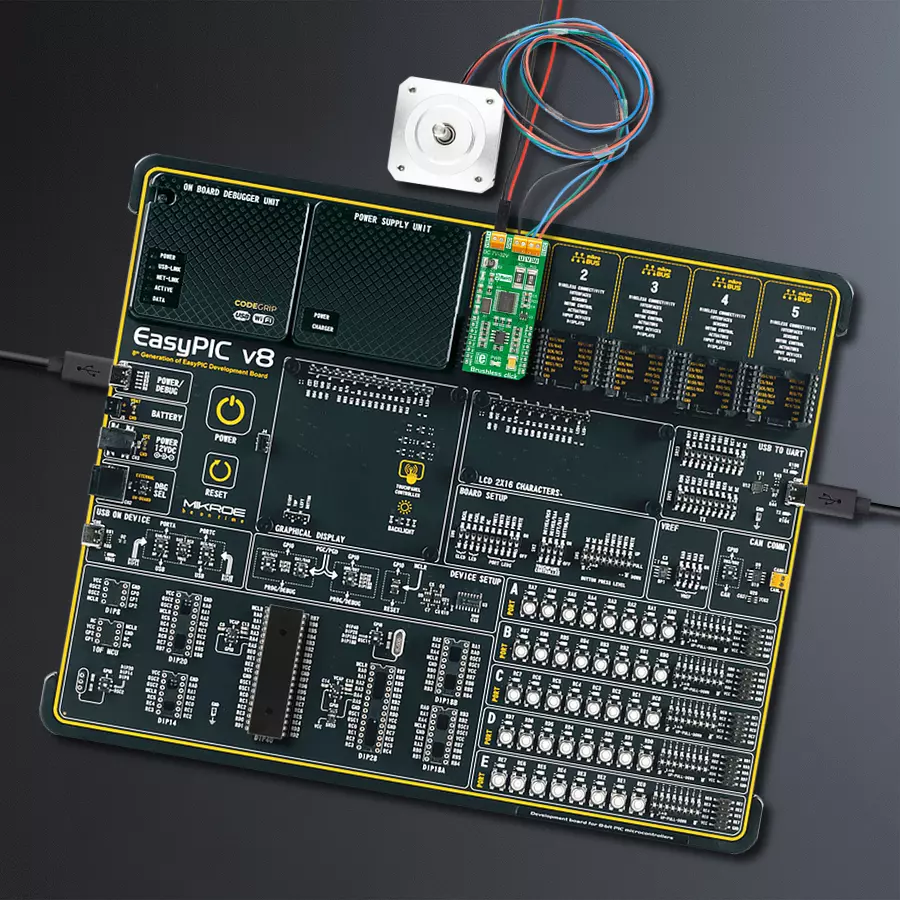
从选择您的开发板和Click板™开始。以EasyPIC v8作为您的开发板开始。














软件支持
库描述
这个库包含了Brushless Click驱动程序的API。
关键函数:
brushless_spin_clockwise- 这个函数将电机的旋转方向设置为顺时针方向brushless_spin_counter_clockwise- 这个函数将电机的旋转方向设置为逆时针方向brushless_read_rotation_speed_sensor_output- 这个函数读取INT引脚的数字输入
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* \file
* \brief Brushless Click example
*
* # Description
* This example showcases how to initialize and use the Brushless Click.
* The Click has a brushless motor driver which controls the work
* of the motor through the BLDC terminal.
* In order for this example to work a motor and a power supply are needed.
*
* The demo application is composed of two sections :
*
* ## Application Init
* This function initializes and configures the logger and Click modules.
*
* ## Application Task
* This is an example that demonstrates the use of a Brushless Click board.
* Brushless Click communicates with the register via the PWM interface.
* It shows moving in the left direction from slow to fast speed
* and from fast to slow speed.
* Results are being sent to the Usart Terminal where you can track their changes.
*
* \author Nikola Peric
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "brushless.h"
// ------------------------------------------------------------------ VARIABLES
static brushless_t brushless;
static log_t logger;
uint8_t brushless_direction = 1;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( )
{
log_cfg_t log_cfg;
brushless_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
Delay_ms ( 100 );
// Click initialization.
brushless_cfg_setup( &cfg );
BRUSHLESS_MAP_MIKROBUS( cfg, MIKROBUS_1 );
Delay_ms ( 100 );
brushless_init( &brushless, &cfg );
brushless_pwm_start( &brushless );
log_info( &logger, "---- Application Task ----" );
Delay_ms ( 1000 );
}
void application_task ( )
{
static int8_t duty_cnt = 1;
static int8_t duty_inc = 1;
float duty = duty_cnt / 10.0;
if ( brushless_direction == 1 )
{
brushless_spin_clockwise ( &brushless );
log_printf( &logger, "<<<< " );
}
else
{
brushless_spin_counter_clockwise ( &brushless );
log_printf( &logger, ">>>> " );
}
brushless_set_duty_cycle ( &brushless, duty );
log_printf( &logger, "Duty: %d%%\r\n", ( uint16_t )( duty_cnt * 10 ) );
Delay_ms ( 500 );
if ( 10 == duty_cnt )
{
duty_inc = -1;
}
else if ( 0 == duty_cnt )
{
duty_inc = 1;
if ( brushless_direction == 1 )
{
brushless_direction = 0;
}
else if ( brushless_direction == 0 )
{
brushless_direction = 1;
}
}
duty_cnt += duty_inc;
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END