掌控并主宰您的BLDC运动,使用STSPIN233和PIC18F57Q43
体验电机控制的未来
已发布 6月 24, 2024
点击板
STSPIN233 Click
开发板
Curiosity Nano with PIC18F57Q43
编译器
NECTO Studio
微控制器单元
PIC18F57Q43
体验我们先进的无刷电机控制,提升响应速度和精度,非常适用于机器人、无人机和工业自动化。
A
A
硬件概览
它是如何工作的?
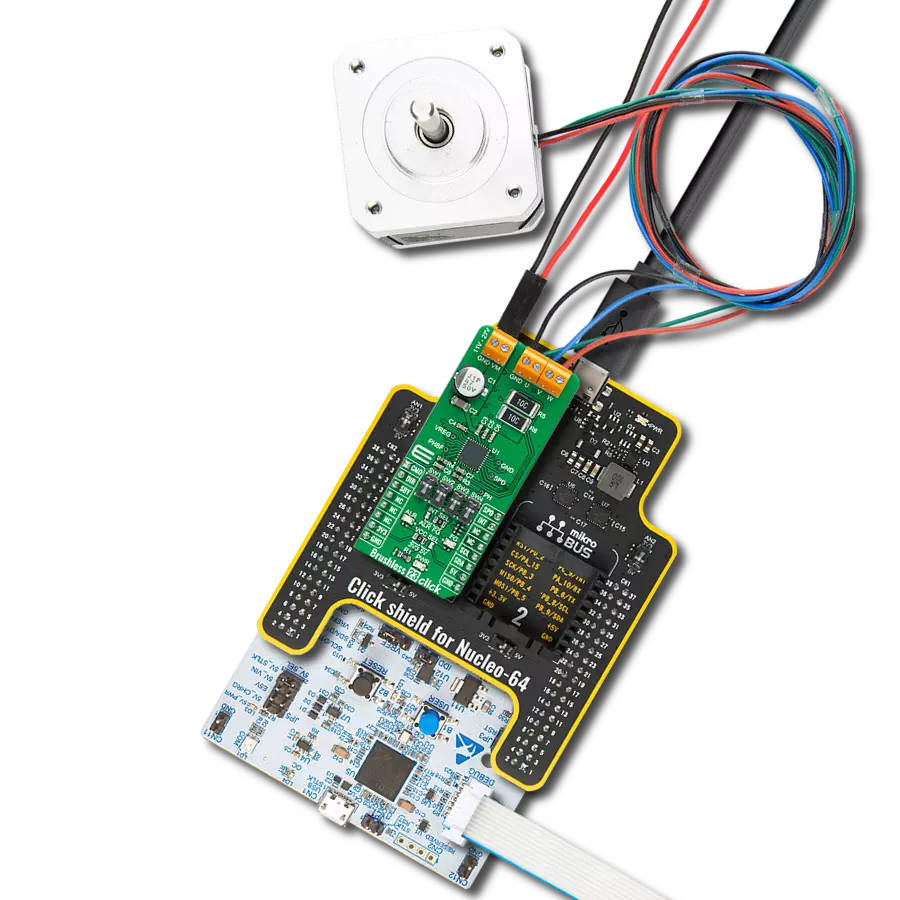
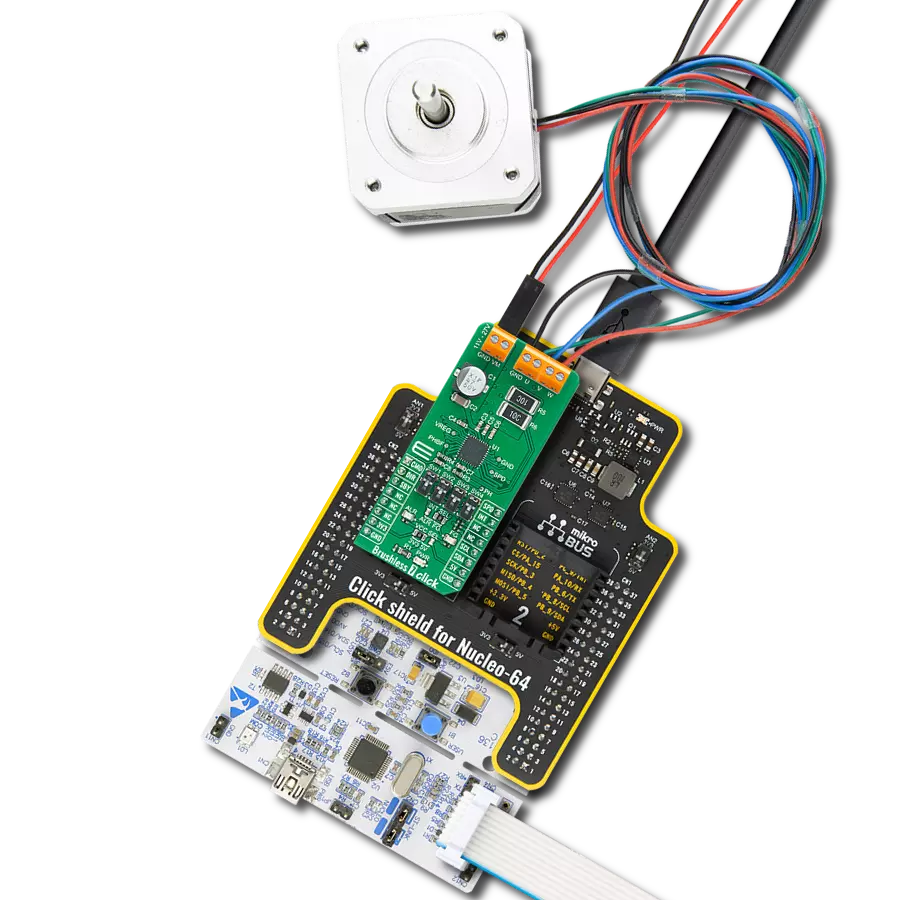
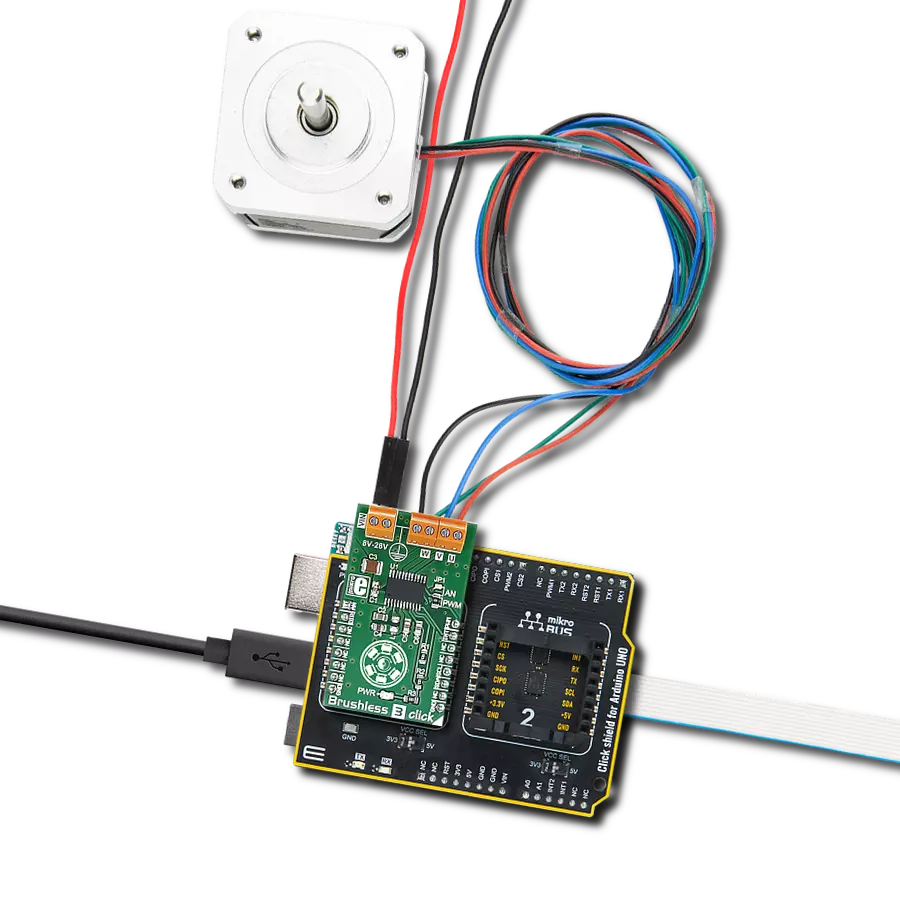
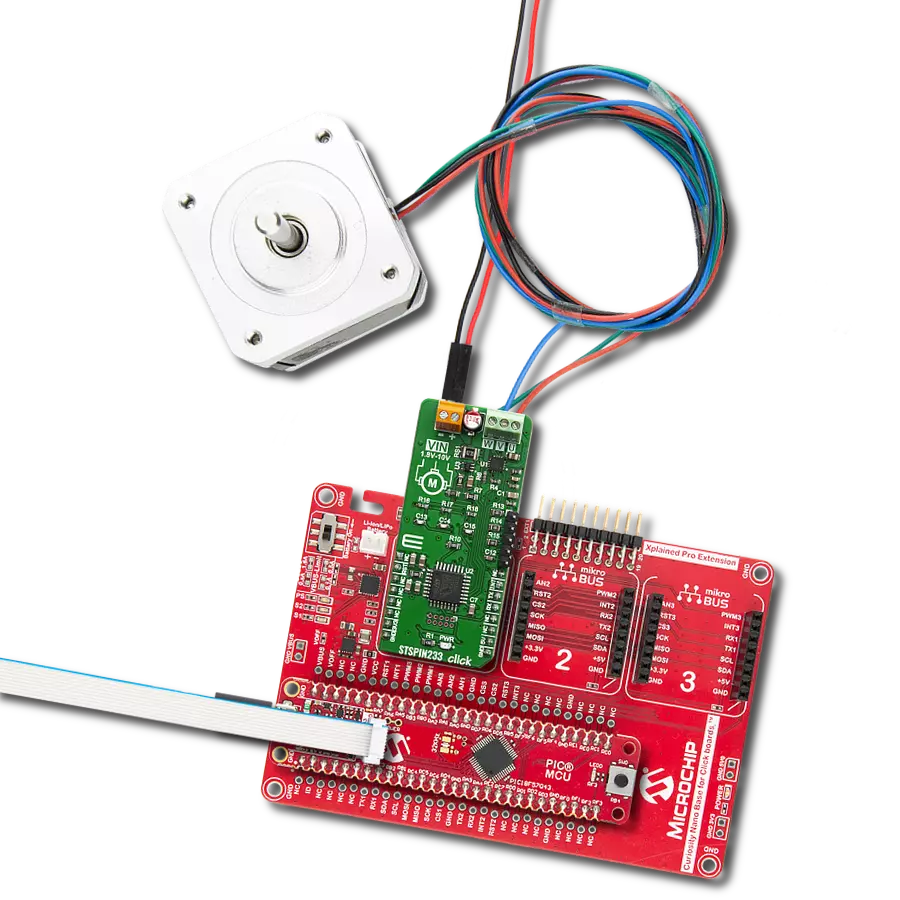
STSPIN233 Click基于STMicroelectronics的低压三相集成电机驱动器STSPIN233。它包含三个独立的H桥,每个桥控制无刷电机的一个相位。这些集成的H桥非常高效,每个桥的导通电阻约为400mΩ(HS+LS)。这些特点使STSPIN233 Click非常适合快速开发各种电池供电的步进电机应用,包括玩具、打印机、机电一体化、无人机、机器人相关应用等。除了无刷驱动IC,该Click板还内置了STM32F031K6T6 MCU,作为STSPIN233 Click的“头脑”。它预装了固件,用于控制电机驱动器。它读取当前电机
状态和来自可选旋转编码器的信号,实时计算期望和实际电机状态值,并对电机驱动器进行必要的校正。电机可以通过RST、INT和UART引脚(RX和TX)进行控制,从而实现非常可靠的无刷电机驱动。STSPIN233 Click的RST引脚用于将两个桥输出设置为高阻态,将电源与H桥断开。由于电流无法从电源流向电机,该引脚允许较低的平均功耗。该引脚连接到mikroBUS™的RST引脚。INT引脚有双重用途:当设置为高逻辑电平时,它作为芯片使能,使设备可以工作;在IC出现故障情况下,该引脚将被置为
低逻辑电平,作为中断引脚。超时周期由外部电容器和电阻值定义,超时后将尝试重新启动。该引脚连接到mikroBUS™的两个INT引脚,允许主MCU使用这两个功能。该引脚在Click板上分别标记为FLT。电机电源可以连接到标记为VIN的输入端子,电压范围应在1.8V至10V之间。无刷电机线圈可以连接到U、V和W端子。Click板需要外部电源供电以使电机工作,但也需要来自mikroBUS™轨的3.3V电压。

功能概述
开发板
PIC18F57Q43 Curiosity Nano 评估套件是一款尖端的硬件平台,旨在评估 PIC18-Q43 系列内的微控制器。其设计的核心是包含了功能强大的 PIC18F57Q43 微控制器(MCU),提供先进的功能和稳健的性能。这个评估套件的关键特点包括一个黄 色用户 LED 和一个响应灵敏的机械用户开关,提供无
缝的交互和测试。为一个 32.768kHz 水晶振荡器足迹提供支持,确保精准的定时能力。套件内置的调试器拥有一个绿色电源和状态 LED,使编程和调试变得直观高效。此外,增强其实用性的还有虚拟串行端口 (CDC)和一个调试 GPIO 通道(DGI GPIO),提供广泛的连接选项。该套件通过 USB 供电,拥有由
MIC5353 LDO 调节器提供支持的可调目标电压功能,确保在 1.8V 至 5.1V 的输出电压范围内稳定运行,最大输出电流为 500mA,受环境温度和电压限制。

微控制器概述
MCU卡片 / MCU
建筑
PIC
MCU 内存 (KB)
128
硅供应商
Microchip
引脚数
48
RAM (字节)
8196
你完善了我!
配件
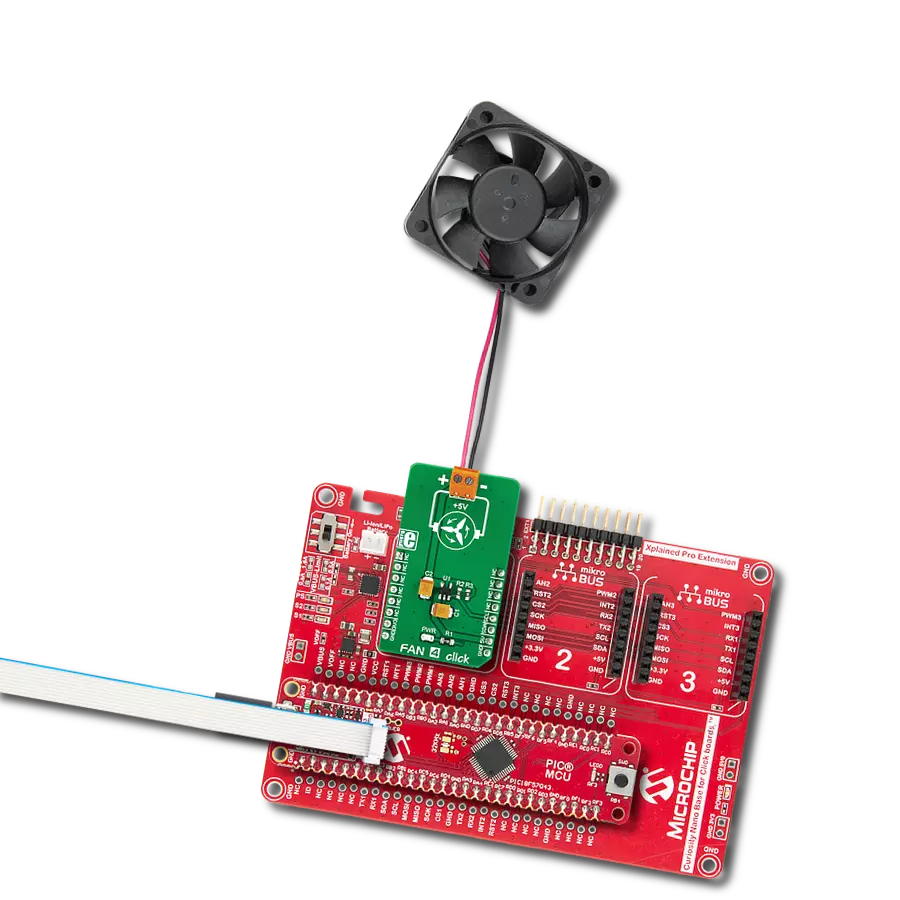
Curiosity Nano Base for Click boards 是一款多功能硬件扩展平台,专为简化 Curiosity Nano 套件与扩展板之间的集成而设计,特别针对符合 mikroBUS™ 标准的 Click 板和 Xplained Pro 扩展板。这款创新的基板(屏蔽板)提供了无缝的连接和扩展可能性,简化了实验和开发过程。主要特点包括从 Curiosity Nano 套件提供 USB 电源兼容性,以及为增强灵活性而提供的另一种外部电源输入选项。板载锂离子/锂聚合物充电器和管理电路确保电池供电应用的平稳运行,简化了使用和管理。此外,基板内置了一个固定的 3.3V 电源供应单元,专用于目标和 mikroBUS™ 电源轨,以及一个固定的 5.0V 升压转换器,专供 mikroBUS™ 插座的 5V 电源轨,为各种连接设备提供稳定的电力供应。

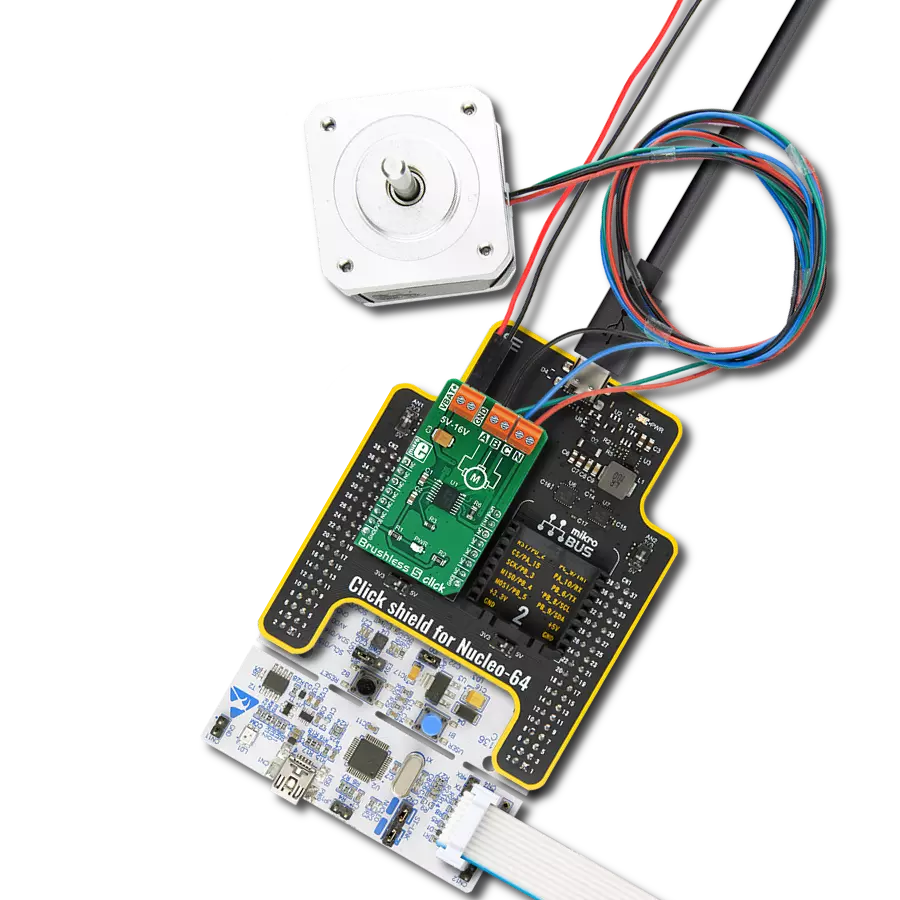
带有霍尔传感器的无刷直流(BLDC)电机是42BLF电机系列中的高性能电机。该电机采用星形连接,具有120°的霍尔效应角度,确保精确可靠的性能。电机长度仅为47毫米,重量仅为0.29千克,设计轻巧紧凑,能够满足您的需求。该电机在24VDC的电压额定值和4000 ± 10% RPM的速度范围内完美运行,提供稳定可靠的动力。在-20至+50°C的正常操作温度范围内,它依然保持高效,额定电流为1.9A。此外,该产品可以无缝集成所有无刷Click板™以及需要霍尔传感器的BLDC电机的设备。

使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
Click board™ 原理图

一步一步来
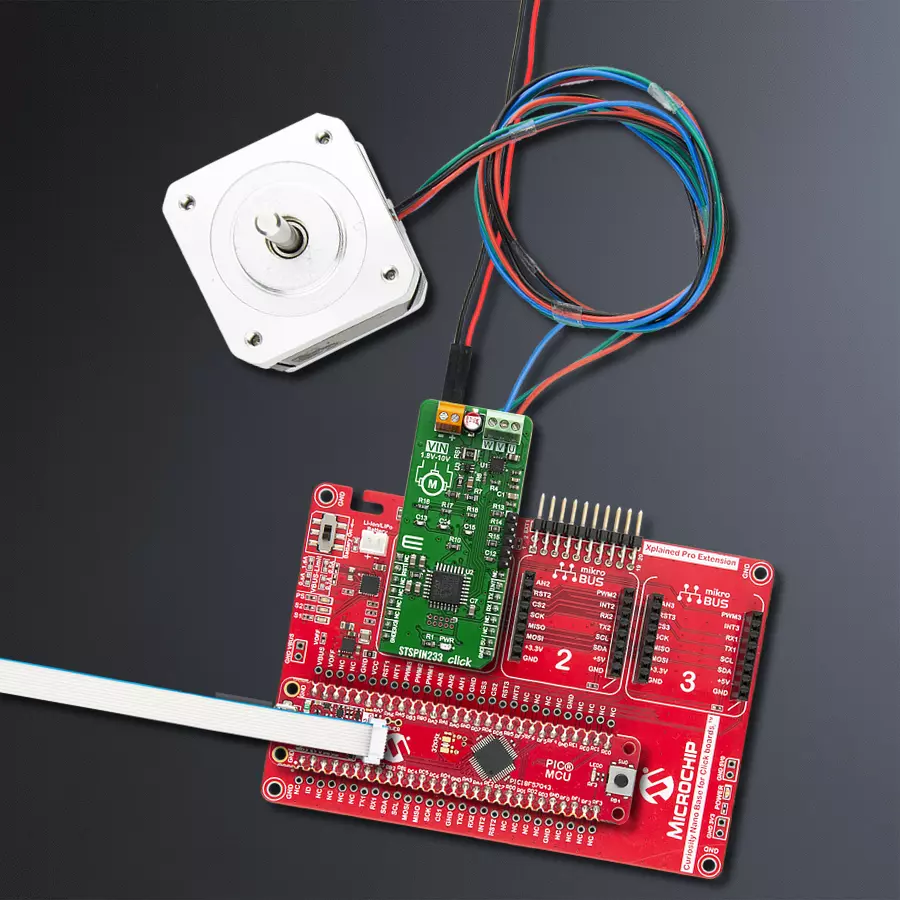
项目组装

从选择您的开发板和Click板™开始。以Curiosity Nano with PIC18F57Q43作为您的开发板开始。














软件支持
库描述
该库包含 STPSIN233 Click 驱动程序的 API。
关键功能:
stspin233_send_single_cmd- 发送单个命令stspin233_send_double_cmd- 发送双命令stspin233_get_int_state- 获取INT引脚状态
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* \file
* \brief Stspin233 Click example
*
* # Description
* This application is motor driver.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes driver and configures the Click board.
*
* ## Application Task
* This example demonstrates the use of STSPIN233 Click board, by running the motor clockwise and counter clockwise.
* All results will be displayed on USB UART.
*
* *note:*
* For all other commands that you can use to control your engine,
* see the firmware documentation. We used an 8 pole motor for the test.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "stspin233.h"
#include "string.h"
#define PROCESS_COUNTER 10
#define PROCESS_RX_BUFFER_SIZE 500
#define PROCESS_PARSER_BUFFER_SIZE 500
// ------------------------------------------------------------------ VARIABLES
static stspin233_t stspin233;
static log_t logger;
static char current_parser_buf[ PROCESS_PARSER_BUFFER_SIZE ];
// ------------------------------------------------------- ADDITIONAL FUNCTIONS
static void stspin233_process ( void )
{
int32_t rsp_size;
uint16_t rsp_cnt = 0;
char uart_rx_buffer[ PROCESS_RX_BUFFER_SIZE ] = { 0 };
uint16_t check_buf_cnt;
uint8_t process_cnt = PROCESS_COUNTER;
// Clear parser buffer
memset( current_parser_buf, 0 , PROCESS_PARSER_BUFFER_SIZE );
while( process_cnt != 0 )
{
rsp_size = stspin233_generic_read( &stspin233, &uart_rx_buffer, PROCESS_RX_BUFFER_SIZE );
if ( rsp_size > 0 )
{
// Validation of the received data
for ( check_buf_cnt = 0; check_buf_cnt < rsp_size; check_buf_cnt++ )
{
if ( uart_rx_buffer[ check_buf_cnt ] == 0 )
{
uart_rx_buffer[ check_buf_cnt ] = 13;
}
}
// Storages data in parser buffer
rsp_cnt += rsp_size;
if ( rsp_cnt < PROCESS_PARSER_BUFFER_SIZE )
{
strncat( current_parser_buf, uart_rx_buffer, rsp_size );
}
// Clear RX buffer
memset( uart_rx_buffer, 0, PROCESS_RX_BUFFER_SIZE );
}
else
{
process_cnt--;
// Process delay
Delay_100ms( );
}
}
}
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
stspin233_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
stspin233_cfg_setup( &cfg );
STSPIN233_MAP_MIKROBUS( cfg, MIKROBUS_1 );
stspin233_init( &stspin233, &cfg );
stspin233_default_cfg( &stspin233 );
}
void application_task ( void )
{
log_printf( &logger, ">>> START MOTOR\r\n" );
stspin233_send_single_cmd( &stspin233, STSPIN233_CMD_START_MOTOR );
stspin233_process( );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf( &logger, ">>> Set clockwise direction\r\n" );
stspin233_send_double_cmd( &stspin233, STSPIN233_CMD_DIR_MOTOR, STSPIN233_CW_DIR );
stspin233_process( );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf( &logger, ">>> Set counter clockwise direction\r\n" );
stspin233_send_double_cmd( &stspin233, STSPIN233_CMD_DIR_MOTOR, STSPIN233_CCW_DIR );
stspin233_process( );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf( &logger, ">>> STOP MOTOR\r\n" );
stspin233_send_single_cmd( &stspin233, STSPIN233_CMD_STOP_MOTOR );
stspin233_process( );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
stspin233_send_single_cmd( &stspin233, STSPIN233_CMD_STATUS );
stspin233_process( );
log_printf( &logger, ">>> STATUS: %.5s\r\n", ¤t_parser_buf[ 9 ] );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf( &logger, "------------------------------\r\n" );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
额外支持
资源
类别:无刷