使用BHI260、BMM150和STM32G474RE实现精确的运动跟踪和方向数据
空间感知和3D建模
已发布 11月 08, 2024
点击板
Smart Sens Click
开发板
Nucleo 64 with STM32G474RE MCU
编译器
NECTO Studio
微控制器单元
STM32G474RE
借助这一智能系统,开发人员可以创建身临其境的虚拟和增强现实体验,提升互动性和真实感。
A
A
硬件概览
它是如何工作的?
Smart Sens Click基于BHI260和BMM150,这是来自Bosch Sensortec的可编程智能传感器,结合了加速度计、陀螺仪和融合软件,以及独立的几何传感器。BHI260基于32位微控制器(Fuser2),主要作为协处理器,用于卸载主CPU的任何传感器数据处理相关任务,如来自BMM150的数据。它集成了惯性测量单元(6DoF IMU)和事件驱动软件框架,使BHI260成为一个完整的传感器子系统和计算平台,以最低的功耗进行传感器数据处理算法的持续运行。BMM150是一种几何传感器,允许在三个垂直轴上测量磁场。专用电路(ASIC)将几何传感器的输出转换为数字结果,然后通过行业标准的数字I2C接口发送到BHI260进行信号处理。BMM150可以通过两种方式与BHI260通信:选择主I2C主接口或辅助I2C主接口。选择可以通过将标记为BUS SEL的SMD跳线定位在适当位置(AUX或M2I)来完成。请注意,所有跳线的位置
必须在同一侧,否则Click板™可能无法响应。BMM150集成了四个基于磁力计的中断引擎:低阈值、高阈值、溢出映射到BMM150的INT引脚,数据就绪映射到BMM150的DRY引脚。通过将标记为INT SEL的SMD跳线定位在适当位置(INT或DRY),用户选择将哪个中断转发到BHI260,BHI260将通过该中断执行BMM150的数据处理。Smart Sens Click允许使用I2C和SPI接口与MCU通信。选择可以通过将标记为COMM SEL的SMD跳线定位在适当位置来完成。请注意,所有跳线的位置必须在同一侧,否则Click板™可能无法响应。选择I2C接口时,BHI260允许使用标记为ADDR SEL的SMD跳线选择其I2C从地址的最低有效位(LSB)。除了接口引脚外,此Click板™还使用了复位引脚(mikroBUS™插座上的RST引脚)和INT引脚(mikroBUS™插座上的INT引脚),以指示BHI260向MCU的数据传输请求。由
于BHI260和BMM150的运行需要1.8V逻辑电压水平,为了正常工作,小型调节LDO(SPX3819)从mikroBUS™电源轨提供1.8V输出。因此,还配备了电压电平转换器TXB0106和PCA9306。接口总线线路被引到双向电压电平转换器,使此Click板™能够与3.3V和5V的MCU正常工作。此外,板载的BOOT开关用于选择是使用主机接口(HOST位置)还是让BHI260尝试从板载QSPI闪存(W25Q32JW)启动并以独立运行模式运行(QSPI位置)。此外,在Smart Sens Click顶部,还有一个额外的未填充的标头,标记为cJTAG,用户可以通过JTAG接口引脚(TCK和TMS)用于调试目的。此Click板™可通过VCC SEL跳线选择使用3.3V或5V逻辑电压水平,这样,既3.3V又5V的MCU都可以正确使用通信线路。此外,此Click板™配备了包含易于使用的功能和示例代码的库,可用作进一步开发的参考。

功能概述
开发板
Nucleo-64 搭载 STM32G474R MCU 提供了一种经济高效且灵活的平台,供开发者探索新想法并原型设计他们的项目。该板利用 STM32 微控制器的多功能性,使用户能够为他们的项目选择最佳的性能与功耗平衡。它配备了 LQFP64 封装的 STM32 微控制器,并包含了如用户 LED(同时作为 ARDUINO® 信号)、用户和复位按钮,以及 32.768kHz 晶体振荡器用于精确的计时操作等基本组件。Nucleo-64 板设计考虑到扩展性和灵活性,它特有的 ARDUINO® Uno
V3 扩展连接器和 ST morpho 扩展引脚头,提供了对 STM32 I/O 的完全访问,以实现全面的项目整合。电源供应选项灵活,支持 ST-LINK USB VBUS 或外部电源,确保在各种开发环境中的适应性。该板还配备了一个具有 USB 重枚举功能的板载 ST-LINK 调试器/编程器,简化了编程和调试过程。此外,该板设计旨在简化高级开发,它的外部 SMPS 为 Vcore 逻辑供电提供高效支持,支持 USB 设备全速或 USB SNK/UFP 全速,并内置加密功能,提升了项目的功效
和安全性。通过外部 SMPS 实验的专用连接器、 用于 ST-LINK 的 USB 连接器以及 MIPI® 调试连接器,提供了更多的硬件接口和实验可能性。开发者将通过 STM32Cube MCU Package 提供的全面免费软件库和示例得到广泛支持。这些,加上与多种集成开发环境(IDE)的兼容性,包括 IAR Embedded Workbench®、MDK-ARM 和 STM32CubeIDE,确保了流畅且高效的开发体验,使用户能够充分利用 Nucleo-64 板在他们的项目中的能力。

微控制器概述
MCU卡片 / MCU

建筑
ARM Cortex-M4
MCU 内存 (KB)
512
硅供应商
STMicroelectronics
引脚数
64
RAM (字节)
128k
你完善了我!
配件
Click Shield for Nucleo-64 配备了两个专有的 mikroBUS™ 插座,使得所有的 Click board™ 设备都可以轻松地与 STM32 Nucleo-64 开发板连接。这样,Mikroe 允许其用户从不断增长的 Click boards™ 范围中添加任何功能,如 WiFi、GSM、GPS、蓝牙、ZigBee、环境传感器、LED、语音识别、电机控制、运动传感器等。您可以使用超过 1537 个 Click boards™,这些 Click boards™ 可以堆叠和集成。STM32 Nucleo-64 开发板基于 64 引脚封装的微控制器,采用 32 位 MCU,配备 ARM Cortex M4 处理器,运行速度为 84MHz,具有 512Kb Flash 和 96KB SRAM,分为两个区域,顶部区域代表 ST-Link/V2 调试器和编程器,而底部区域是一个实际的开发板。通过 USB 连接方便地控制和供电这些板子,以便直接对 Nucleo-64 开发板进行编程和高效调试,其中还需要额外的 USB 线连接到板子上的 USB 迷你接口。大多数 STM32 微控制器引脚都连接到了板子左右边缘的 IO 引脚上,然后连接到两个现有的 mikroBUS™ 插座上。该 Click Shield 还有几个开关,用于选择 mikroBUS™ 插座上模拟信号的逻辑电平和 mikroBUS™ 插座本身的逻辑电压电平。此外,用户还可以通过现有的双向电平转换器,使用任何 Click board™,无论 Click board™ 是否在 3.3V 或 5V 逻辑电压电平下运行。一旦将 STM32 Nucleo-64 开发板与我们的 Click Shield for Nucleo-64 连接,您就可以访问数百个工作于 3.3V 或 5V 逻辑电压电平的 Click boards™。

使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
Click board™ 原理图

一步一步来
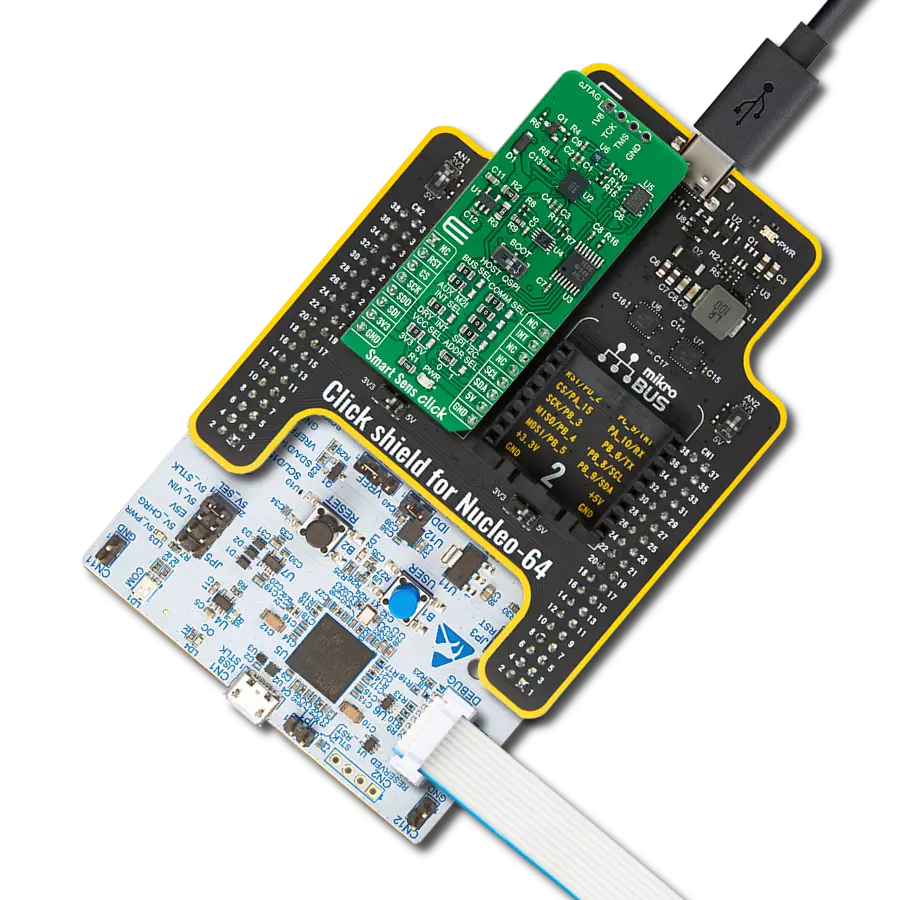
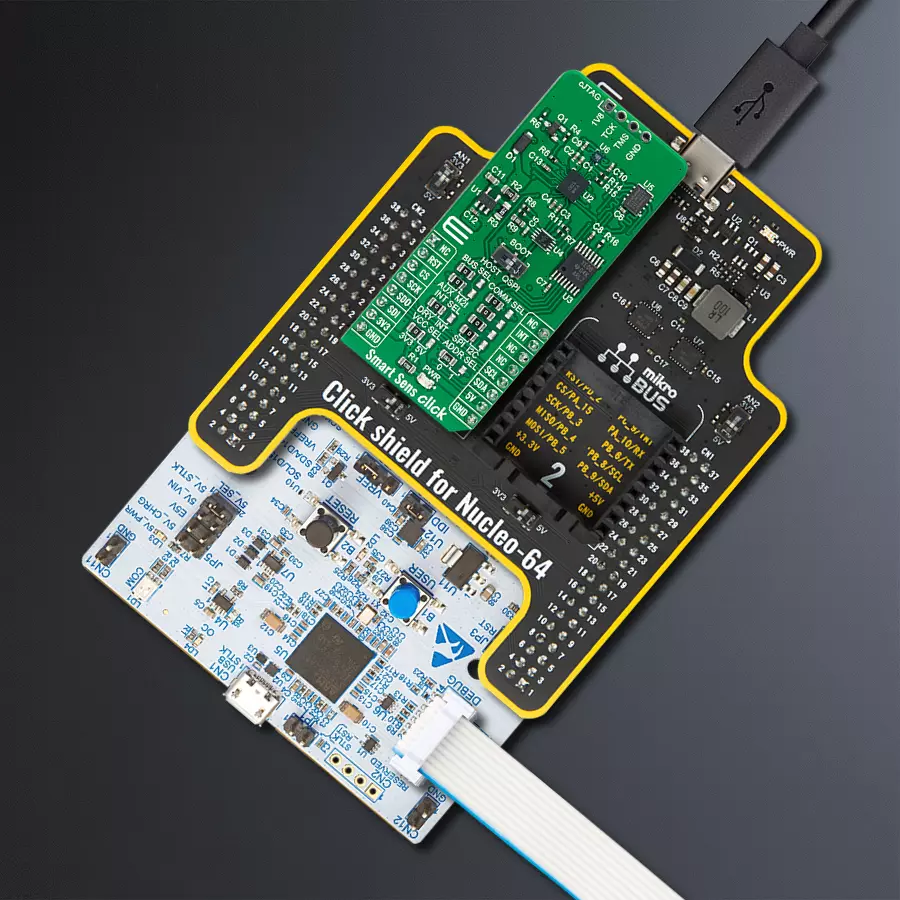
项目组装
从选择您的开发板和Click板™开始。以Nucleo 64 with STM32G474RE MCU作为您的开发板开始。













实时跟踪您的结果
应用程序输出
1. 应用程序输出 - 在调试模式下,“应用程序输出”窗口支持实时数据监控,直接提供执行结果的可视化。请按照提供的教程正确配置环境,以确保数据正确显示。

2. UART 终端 - 使用UART Terminal通过USB to UART converter监视数据传输,实现Click board™与开发系统之间的直接通信。请根据项目需求配置波特率和其他串行设置,以确保正常运行。有关分步设置说明,请参考提供的教程。

3. Plot 输出 - Plot功能提供了一种强大的方式来可视化实时传感器数据,使趋势分析、调试和多个数据点的对比变得更加直观。要正确设置,请按照提供的教程,其中包含使用Plot功能显示Click board™读数的分步示例。在代码中使用Plot功能时,请使用以下函数:plot(insert_graph_name, variable_name);。这是一个通用格式,用户需要将“insert_graph_name”替换为实际图表名称,并将“variable_name”替换为要显示的参数。

软件支持
库描述
该库包含 Smart Sens Click 驱动程序的 API。
关键功能:
smartsens_cmd_write- 发送命令smartsens_get_parameter- 获取命令参数响应smartsens_power_on_device- 启动设备/上传固件到设备
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* @file main.c
* @brief Smart Sens Click example
*
* # Description
* This example showcases the ability of the Smart Sens Click board.
* It has multiple examples that you can easily select with the
* defines at the top of the main. There are 5 examples: Euler, Quaternion,
* and Vector (Accelerometer, Gyroscope, Magnetometer).
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization of communication modules (SPI/I2C) and additional
* pins(int_pin, rst). After that going through reset sequence and checking
* device and product IDs, interrupt mask, and host control is set to 0, so
* every interrupt enabled. If boot status is OK boot sequence is initiated,
* depending on the defines from the library header it will use RAM or Flash type
* of the boot. If RAM is selected firmware image first needs to be uploaded to RAM
* and then it will be booted. If Flash example is selected it will try to boot
* firmware first if it fails it will then write firmware image to flash and then
* try to boot it again. When firmware boot is finished Kernel version and Feature
* registers will be read to check if the firmware is loaded. Then all the callback function
* will be registered(meta event callback and whatever type of example parser you set),
* and driver will update the list of virtual sensors present, and finally will configure
* virtual sensor that will be used in the selected example.
*
* ## Application Task
* Wait for an interrupt to occur, then read wake-up, non-weak-up, and status FIFO.
* Parse received data and run the callback parsers to show data on the USB UART.
*
* @note
* Select one of the examples with macros at the top of the main file. Euler example is selected by default.
* You can choose one of 3 type of parsers: Euler, Quaternion, Vector. If Vector example is selected
* you choose one of the 3 sensors to show X, Y, and Z values: Accelerometer, Gyroscope, or Magnetometer.
*
* @author MikroE Team
*
*/
#include "board.h"
#include "log.h"
#include "smartsens.h"
/**
* @brief Example parser selector.
* @details Macros for selecting example and its parser.
*/
#define EULER 1
#define QUATERNION 0
#define VECTOR 0
/**
* @brief Vector sensor selector.
* @details Macros for selecting vector's sensor.
*/
#define ACCELEROMETER 1
#define GYROSCOPE 0
#define MAGNETOMETER 0
#define WORK_BUFFER_SIZE 2048
uint8_t work_buffer[ WORK_BUFFER_SIZE ] = { 0 };
static smartsens_t smartsens;
static log_t logger;
uint8_t accuracy; /* Accuracy is reported as a meta event. It is being printed alongside the data */
#if EULER
/**
* @brief Euler data.
* @details Struct for euler data of the Smart Sens Click example.
*/
struct smartsens_data_orientation
{
int16_t heading;
int16_t pitch;
int16_t roll;
};
/**
* @brief Euler callback parsing function.
* @details Callback function to parse euler data.
* @param[in] callback_info : Callback data.
* @param[in] callback_ref : Callback reference.
* @return Nothing
*/
static void parse_euler ( struct smartsens_fifo_parse_data_info *callback_info, void *callback_ref );
#elif QUATERNION
/**
* @brief Quaternion data.
* @details Struct for quaternion data of the Smart Sens Click example.
*/
struct smartsens_data_quaternion
{
int16_t x;
int16_t y;
int16_t z;
int16_t w;
uint16_t accuracy;
};
/**
* @brief Parse FIFO frame data into quaternion
* @details Function to parse FIFO frame data into quaternion
* @param[in] callback_info : Callback data.
* @param[in] callback_ref : Callback reference.
*/
static void parse_quaternion ( struct smartsens_fifo_parse_data_info *callback_info, void *callback_ref );
#elif VECTOR
/**
* @brief Vector data.
* @details Struct for vector data of the Smart Sens Click example.
*/
struct smartsens_data_xyz
{
int16_t x;
int16_t y;
int16_t z;
};
/**
* @brief Parse reference.
* @details Struct for parse reference data of the Smart Sens Click example.
*/
struct parse_ref
{
struct
{
uint8_t accuracy;
float scaling_factor;
}
sensor[ SMARTSENS_SENSOR_ID_MAX ];
uint8_t *verbose;
};
struct parse_ref parse_table;
/**
* @brief Vector callback parsing function.
* @details Callback function to parse vector data.
* @param[in] callback_info : Callback data.
* @param[in] callback_ref : Callback reference.
* @return Nothing
*/
static void parse_vector_s16 ( struct smartsens_fifo_parse_data_info *callback_info, void *callback_ref );
#else
#error NO_EXAMPLE_DEFINED
#endif
/**
* @brief Meta event callback parsing function.
* @details Callback function to parse meta event data.
* @param[in] callback_info : Callback data.
* @param[in] callback_ref : Callback reference.
* @return Nothing
*/
static void parse_meta_event ( struct smartsens_fifo_parse_data_info *callback_info, void *callback_ref );
/**
* @brief Get name of the virtual sensor by ID.
* @details Function return name of the virutal sensor by its ID.
* @param[in] sensor_id : Virtual sensor ID.
* @return Virtual sensor name.
*/
static char* get_sensor_name ( uint8_t sensor_id );
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
smartsens_cfg_t smartsens_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
smartsens_cfg_setup( &smartsens_cfg );
SMARTSENS_MAP_MIKROBUS( smartsens_cfg, MIKROBUS_1 );
err_t init_flag = smartsens_init( &smartsens, &smartsens_cfg );
if ( ( I2C_MASTER_ERROR == init_flag ) || ( SPI_MASTER_ERROR == init_flag ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
/* It can take a few seconds to configure and boot device */
log_info( &logger, " Configuring device..." );
if ( SMARTSENS_ERROR == smartsens_default_cfg ( &smartsens ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Setting callbacks..." );
/* Set callbacks */
if ( smartsens_register_fifo_parse_callback( &smartsens, SMARTSENS_SYS_ID_META_EVENT,
parse_meta_event, &accuracy ) )
{
log_error( &logger, " FIFO sys meta event." );
for ( ; ; );
}
if ( smartsens_register_fifo_parse_callback( &smartsens, SMARTSENS_SYS_ID_META_EVENT_WU,
parse_meta_event, &accuracy ) )
{
log_error( &logger, " FIFO sys meta event wu." );
for ( ; ; );
}
uint8_t sensor_id;
smartsens_fifo_parse_callback_t callback;
void *callback_ref;
#if EULER
sensor_id = SMARTSENS_SENSOR_ID_ORI;
callback = parse_euler;
callback_ref = &accuracy;
#elif QUATERNION
sensor_id = SMARTSENS_SENSOR_ID_RV;
callback = parse_quaternion;
callback_ref = NULL;
#elif VECTOR
#if ACCELEROMETER
parse_table.sensor[ SMARTSENS_SENSOR_ID_ACC ].scaling_factor = 1.0f / 4096.0f;
sensor_id = SMARTSENS_SENSOR_ID_ACC;
#elif GYROSCOPE
parse_table.sensor[ SMARTSENS_SENSOR_ID_GYRO ].scaling_factor = 1.0f;
sensor_id = SMARTSENS_SENSOR_ID_GYRO;
#elif MAGNETOMETER
parse_table.sensor[ SMARTSENS_SENSOR_ID_MAG ].scaling_factor = 1.0f;
sensor_id = SMARTSENS_SENSOR_ID_MAG;
#else
#error NO_VECTOR_EXAMPLE_DEFINED
#endif
callback = parse_vector_s16;
callback_ref = &parse_table;
#else
#error NO_EXAMPLE_DEFINED
#endif
if ( smartsens_register_fifo_parse_callback( &smartsens, sensor_id, callback, callback_ref ) )
{
log_error( &logger, " FIFO sensor id." );
for ( ; ; );
}
/* Go through fifo process */
if ( smartsens_get_and_process_fifo( &smartsens, work_buffer, WORK_BUFFER_SIZE ) )
{
log_error( &logger, " FIFO get and process." );
for ( ; ; );
}
/* Update virtual sensor list in context object */
if ( smartsens_update_virtual_sensor_list( &smartsens ) )
{
log_error( &logger, " Update virtual sensor list." );
for ( ; ; );
}
/* Set virtual sensor configuration */
float sample_rate = 10.0; /* Read out data at 10Hz */
uint32_t report_latency_ms = 0; /* Report immediately */
if ( smartsens_set_virt_sensor_cfg( &smartsens, sensor_id, sample_rate, report_latency_ms ) )
{
log_error( &logger, " Set virtual sensor configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
/* Check interrupt and get and process fifo buffer */
if ( smartsens_get_interrupt( &smartsens ) )
{
/* Data from the FIFO is read and the relevant callbacks if registered are called */
if ( smartsens_get_and_process_fifo( &smartsens, work_buffer, WORK_BUFFER_SIZE ) )
{
log_error( &logger, " Get and process fifo." );
for ( ; ; );
}
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
#if EULER
static void parse_euler ( struct smartsens_fifo_parse_data_info *callback_info, void *callback_ref )
{
struct smartsens_data_orientation data_val;
uint8_t *accuracy = ( uint8_t* ) callback_ref;
if ( callback_info->data_size != 7 ) /* Check for a valid payload size. Includes sensor ID */
{
return;
}
data_val.heading = SMARTSENS_LE2S16( callback_info->data_ptr );
data_val.pitch = SMARTSENS_LE2S16( callback_info->data_ptr + 2 );
data_val.roll = SMARTSENS_LE2S16( callback_info->data_ptr + 4 );
if ( accuracy )
{
log_printf( &logger, "SID: %s; H: %.3f, P: %.3f, R: %.3f; acc: %u; Time: %lus\r\n",
get_sensor_name( callback_info->sensor_id ),
( float ) ( data_val.heading * 360.0f / 32768.0f ),
( float ) ( data_val.pitch * 360.0f / 32768.0f ),
( float ) ( data_val.roll * 360.0f / 32768.0f ),
( uint16_t ) ( *accuracy ),
SMARTSENS_TIMESTAMP_TO_SEC( *callback_info->time_stamp ) );
}
else
{
log_printf( &logger, "SID: %s; H: %.3f, P: %.3f, R: %.3f; Time: %lus\r\n",
get_sensor_name( callback_info->sensor_id ),
( float ) ( data_val.heading * 360.0f / 32768.0f ),
( float ) ( data_val.pitch * 360.0f / 32768.0f ),
( float ) ( data_val.roll * 360.0f / 32768.0f ),
SMARTSENS_TIMESTAMP_TO_SEC( *callback_info->time_stamp ) );
}
}
#elif QUATERNION
static void parse_quaternion ( struct smartsens_fifo_parse_data_info *callback_info, void *callback_ref )
{
struct smartsens_data_quaternion data_val;
if ( callback_info->data_size != 11 ) /* Check for a valid payload size. Includes sensor ID */
{
return;
}
data_val.x = SMARTSENS_LE2S16( callback_info->data_ptr );
data_val.y = SMARTSENS_LE2S16( callback_info->data_ptr + 2 );
data_val.z = SMARTSENS_LE2S16( callback_info->data_ptr + 4 );
data_val.w = SMARTSENS_LE2S16( callback_info->data_ptr + 6 );
data_val.accuracy = SMARTSENS_LE2U16( callback_info->data_ptr + 8 );
log_printf( &logger, "SID: %s; X: %.3f, Y: %.3f, Z: %.3f, W: %.3f; acc: %.2f; Time: %lus\r\n",
get_sensor_name( callback_info->sensor_id ),
( float ) ( data_val.x / 16384.0f ),
( float ) ( data_val.y / 16384.0f ),
( float ) ( data_val.z / 16384.0f ),
( float ) ( data_val.w / 16384.0f ),
( float ) ( ( ( data_val.accuracy * 180.0f ) / 16384.0f ) / 3.141592653589793f ),
SMARTSENS_TIMESTAMP_TO_SEC( *callback_info->time_stamp ) );
}
#elif VECTOR
static void parse_vector_s16 ( struct smartsens_fifo_parse_data_info *callback_info, void *callback_ref )
{
struct smartsens_data_xyz data_value;
if ( callback_ref )
{
struct parse_ref *parse_table = ( struct parse_ref* ) callback_ref;
float scaling_factor = parse_table->sensor[ callback_info->sensor_id ].scaling_factor;
data_value.x = SMARTSENS_LE2S16( callback_info->data_ptr );
data_value.y = SMARTSENS_LE2S16( callback_info->data_ptr + 2 );
data_value.z = SMARTSENS_LE2S16( callback_info->data_ptr + 4 );
#if ACCELEROMETER
log_printf( &logger, "SID: %s; X: %.3f, Y: %.3f, Z: %.3f; acc: %u; Time: %lus\r\n",
get_sensor_name( callback_info->sensor_id ),
( float ) ( data_value.x * scaling_factor ),
( float ) ( data_value.y * scaling_factor ),
( float ) ( data_value.z * scaling_factor ),
( uint16_t ) parse_table->sensor[ callback_info->sensor_id ].accuracy,
SMARTSENS_TIMESTAMP_TO_SEC( *callback_info->time_stamp ) );
#elif GYROSCOPE
log_printf( &logger, "SID: %s; X: %d, Y: %d, Z: %d; acc: %u; Time: %lus\r\n",
get_sensor_name( callback_info->sensor_id ),
( int16_t ) ( data_value.x * scaling_factor ),
( int16_t ) ( data_value.y * scaling_factor ),
( int16_t ) ( data_value.z * scaling_factor ),
( uint16_t ) parse_table->sensor[ callback_info->sensor_id ].accuracy,
SMARTSENS_TIMESTAMP_TO_SEC( *callback_info->time_stamp ) );
#elif MAGNETOMETER
log_printf( &logger, "SID: %s; X: %d, Y: %d, Z: %d; acc: %u; Time: %lus\r\n",
get_sensor_name( callback_info->sensor_id ),
( int16_t ) ( data_value.x * scaling_factor ),
( int16_t ) ( data_value.y * scaling_factor ),
( int16_t ) ( data_value.z * scaling_factor ),
( uint16_t ) parse_table->sensor[ callback_info->sensor_id ].accuracy,
SMARTSENS_TIMESTAMP_TO_SEC( *callback_info->time_stamp ) );
#else
#error NO_VECTOR_EXAMPLE_DEFINED
#endif
}
else
{
log_error( &logger, "Null reference" );
}
}
#else
#error NO_EXAMPLE_DEFINED
#endif
static void parse_meta_event ( struct smartsens_fifo_parse_data_info *callback_info, void *callback_ref )
{
uint8_t meta_event_type = callback_info->data_ptr[ 0 ];
uint8_t byte1 = callback_info->data_ptr[ 1 ];
uint8_t byte2 = callback_info->data_ptr[ 2 ];
uint8_t *accuracy = ( uint8_t* ) callback_ref;
char *event_text;
if ( SMARTSENS_SYS_ID_META_EVENT == callback_info->sensor_id )
{
event_text = "[META EVENT]";
}
else if ( SMARTSENS_SYS_ID_META_EVENT_WU == callback_info->sensor_id )
{
event_text = "[META EVENT WAKE UP]";
}
else
{
return;
}
switch ( meta_event_type )
{
case SMARTSENS_META_EVENT_FLUSH_COMPLETE:
{
log_printf( &logger, "%s Flush complete for sensor id %s\r\n",
event_text, get_sensor_name( byte1 ) );
break;
}
case SMARTSENS_META_EVENT_SAMPLE_RATE_CHANGED:
{
log_printf( &logger, "%s Sample rate changed for sensor id %s\r\n",
event_text, get_sensor_name( byte1 ) );
break;
}
case SMARTSENS_META_EVENT_POWER_MODE_CHANGED:
{
log_printf( &logger, "%s Power mode changed for sensor id %s\r\n",
event_text, get_sensor_name( byte1 ) );
break;
}
case SMARTSENS_META_EVENT_ALGORITHM_EVENTS:
{
log_printf( &logger, "%s Algorithm event\r\n", event_text );
break;
}
case SMARTSENS_META_EVENT_SENSOR_STATUS:
{
log_printf( &logger, "%s Accuracy for sensor id %s changed to %s\r\n",
event_text, get_sensor_name( byte1 ), get_sensor_name( byte2 ) );
if ( accuracy )
{
*accuracy = byte2;
}
break;
}
case SMARTSENS_META_EVENT_BSX_DO_STEPS_MAIN:
{
log_printf( &logger, "%s BSX event (do steps main)\r\n", event_text );
break;
}
case SMARTSENS_META_EVENT_BSX_DO_STEPS_CALIB:
{
log_printf( &logger, "%s BSX event (do steps calib)\r\n", event_text );
break;
}
case SMARTSENS_META_EVENT_BSX_GET_OUTPUT_SIGNAL:
{
log_printf( &logger, "%s BSX event (get output signal)\r\n", event_text );
break;
}
case SMARTSENS_META_EVENT_SENSOR_ERROR:
{
log_printf( &logger, "%s Sensor id %u reported error 0x%02X\r\n",
event_text, byte1, byte2 );
break;
}
case SMARTSENS_META_EVENT_FIFO_OVERFLOW:
{
log_printf( &logger, "%s FIFO overflow\r\n", event_text );
break;
}
case SMARTSENS_META_EVENT_DYNAMIC_RANGE_CHANGED:
{
log_printf( &logger, "%s Dynamic range changed for sensor id %s\r\n",
event_text, get_sensor_name( byte1 ) );
break;
}
case SMARTSENS_META_EVENT_FIFO_WATERMARK:
{
log_printf( &logger, "%s FIFO watermark reached\r\n", event_text );
break;
}
case SMARTSENS_META_EVENT_INITIALIZED:
{
log_printf( &logger, "%s Firmware initialized. Firmware version %u\r\n",
event_text, ( ( uint16_t )byte2 << 8 ) | byte1 );
break;
}
case SMARTSENS_META_TRANSFER_CAUSE:
{
log_printf( &logger, "%s Transfer cause for sensor id %s\r\n",
event_text, get_sensor_name( byte1 ) );
break;
}
case SMARTSENS_META_EVENT_SENSOR_FRAMEWORK:
{
log_printf( &logger, "%s Sensor framework event for sensor id %s\r\n",
event_text, byte1 );
break;
}
case SMARTSENS_META_EVENT_RESET:
{
log_printf( &logger, "%s Reset event\r\n", event_text );
break;
}
case SMARTSENS_META_EVENT_SPACER:
{
break;
}
default:
{
log_printf( &logger, "%s Unknown meta event with id: %u\r\n",
event_text, meta_event_type );
break;
}
}
}
static char* get_sensor_name ( uint8_t sensor_id )
{
char *ret;
switch ( sensor_id )
{
case SMARTSENS_SENSOR_ID_ACC_PASS:
{
ret = "Accelerometer passthrough";
break;
}
case SMARTSENS_SENSOR_ID_ACC_RAW:
{
ret = "Accelerometer uncalibrated";
break;
}
case SMARTSENS_SENSOR_ID_ACC:
ret = "Accelerometer corrected";
break;
case SMARTSENS_SENSOR_ID_ACC_BIAS:
{
ret = "Accelerometer offset";
break;
}
case SMARTSENS_SENSOR_ID_ACC_WU:
{
ret = "Accelerometer corrected wake up";
break;
}
case SMARTSENS_SENSOR_ID_ACC_RAW_WU:
{
ret = "Accelerometer uncalibrated wake up";
break;
}
case SMARTSENS_SENSOR_ID_GYRO_PASS:
{
ret = "Gyroscope passthrough";
break;
}
case SMARTSENS_SENSOR_ID_GYRO_RAW:
{
ret = "Gyroscope uncalibrated";
break;
}
case SMARTSENS_SENSOR_ID_GYRO:
{
ret = "Gyroscope corrected";
break;
}
case SMARTSENS_SENSOR_ID_GYRO_BIAS:
{
ret = "Gyroscope offset";
break;
}
case SMARTSENS_SENSOR_ID_GYRO_WU:
{
ret = "Gyroscope wake up";
break;
}
case SMARTSENS_SENSOR_ID_GYRO_RAW_WU:
{
ret = "Gyroscope uncalibrated wake up";
break;
}
case SMARTSENS_SENSOR_ID_MAG_PASS:
{
ret = "Magnetometer passthrough";
break;
}
case SMARTSENS_SENSOR_ID_MAG_RAW:
{
ret = "Magnetometer uncalibrated";
break;
}
case SMARTSENS_SENSOR_ID_MAG:
{
ret = "Magnetometer corrected";
break;
}
case SMARTSENS_SENSOR_ID_MAG_BIAS:
{
ret = "Magnetometer offset";
break;
}
case SMARTSENS_SENSOR_ID_MAG_WU:
{
ret = "Magnetometer wake up";
break;
}
case SMARTSENS_SENSOR_ID_MAG_RAW_WU:
{
ret = "Magnetometer uncalibrated wake up";
break;
}
case SMARTSENS_SENSOR_ID_GRA:
{
ret = "Gravity vector";
break;
}
case SMARTSENS_SENSOR_ID_GRA_WU:
{
ret = "Gravity vector wake up";
break;
}
case SMARTSENS_SENSOR_ID_LACC:
{
ret = "Linear acceleration";
break;
}
case SMARTSENS_SENSOR_ID_LACC_WU:
{
ret = "Linear acceleration wake up";
break;
}
case SMARTSENS_SENSOR_ID_RV:
{
ret = "Rotation vector";
break;
}
case SMARTSENS_SENSOR_ID_RV_WU:
{
ret = "Rotation vector wake up";
break;
}
case SMARTSENS_SENSOR_ID_GAMERV:
{
ret = "Game rotation vector";
break;
}
case SMARTSENS_SENSOR_ID_GAMERV_WU:
{
ret = "Game rotation vector wake up";
break;
}
case SMARTSENS_SENSOR_ID_GEORV:
{
ret = "Geo-magnetic rotation vector";
break;
}
case SMARTSENS_SENSOR_ID_GEORV_WU:
{
ret = "Geo-magnetic rotation vector wake up";
break;
}
case SMARTSENS_SENSOR_ID_ORI:
{
ret = "Orientation";
break;
}
case SMARTSENS_SENSOR_ID_ORI_WU:
{
ret = "Orientation wake up";
break;
}
case SMARTSENS_SENSOR_ID_TILT_DETECTOR:
{
ret = "Tilt detector";
break;
}
case SMARTSENS_SENSOR_ID_STD:
{
ret = "Step detector";
break;
}
case SMARTSENS_SENSOR_ID_STC:
{
ret = "Step counter";
break;
}
case SMARTSENS_SENSOR_ID_STC_WU:
{
ret = "Step counter wake up";
break;
}
case SMARTSENS_SENSOR_ID_SIG:
{
ret = "Significant motion";
break;
}
case SMARTSENS_SENSOR_ID_WAKE_GESTURE:
{
ret = "Wake gesture";
break;
}
case SMARTSENS_SENSOR_ID_GLANCE_GESTURE:
{
ret = "Glance gesture";
break;
}
case SMARTSENS_SENSOR_ID_PICKUP_GESTURE:
{
ret = "Pickup gesture";
break;
}
case SMARTSENS_SENSOR_ID_AR:
{
ret = "Activity recognition";
break;
}
case SMARTSENS_SENSOR_ID_WRIST_TILT_GESTURE:
{
ret = "Wrist tilt gesture";
break;
}
case SMARTSENS_SENSOR_ID_DEVICE_ORI:
{
ret = "Device orientation";
break;
}
case SMARTSENS_SENSOR_ID_DEVICE_ORI_WU:
{
ret = "Device orientation wake up";
break;
}
case SMARTSENS_SENSOR_ID_STATIONARY_DET:
{
ret = "Stationary detect";
break;
}
case SMARTSENS_SENSOR_ID_MOTION_DET:
{
ret = "Motion detect";
break;
}
case SMARTSENS_SENSOR_ID_ACC_BIAS_WU:
{
ret = "Accelerometer offset wake up";
break;
}
case SMARTSENS_SENSOR_ID_GYRO_BIAS_WU:
{
ret = "Gyroscope offset wake up";
break;
}
case SMARTSENS_SENSOR_ID_MAG_BIAS_WU:
{
ret = "Magnetometer offset wake up";
break;
}
case SMARTSENS_SENSOR_ID_STD_WU:
{
ret = "Step detector wake up";
break;
}
case SMARTSENS_SENSOR_ID_TEMP:
{
ret = "Temperature";
break;
}
case SMARTSENS_SENSOR_ID_BARO:
{
ret = "Barometer";
break;
}
case SMARTSENS_SENSOR_ID_HUM:
{
ret = "Humidity";
break;
}
case SMARTSENS_SENSOR_ID_GAS:
{
ret = "Gas";
break;
}
case SMARTSENS_SENSOR_ID_TEMP_WU:
{
ret = "Temperature wake up";
break;
}
case SMARTSENS_SENSOR_ID_BARO_WU:
{
ret = "Barometer wake up";
break;
}
case SMARTSENS_SENSOR_ID_HUM_WU:
{
ret = "Humidity wake up";
break;
}
case SMARTSENS_SENSOR_ID_GAS_WU:
{
ret = "Gas wake up";
break;
}
case SMARTSENS_SENSOR_ID_STC_HW:
{
ret = "Hardware Step counter";
break;
}
case SMARTSENS_SENSOR_ID_STD_HW:
{
ret = "Hardware Step detector";
break;
}
case SMARTSENS_SENSOR_ID_SIG_HW:
{
ret = "Hardware Significant motion";
break;
}
case SMARTSENS_SENSOR_ID_STC_HW_WU:
{
ret = "Hardware Step counter wake up";
break;
}
case SMARTSENS_SENSOR_ID_STD_HW_WU:
{
ret = "Hardware Step detector wake up";
break;
}
case SMARTSENS_SENSOR_ID_SIG_HW_WU:
{
ret = "Hardware Significant motion wake up";
break;
}
case SMARTSENS_SENSOR_ID_ANY_MOTION:
{
ret = "Any motion";
break;
}
case SMARTSENS_SENSOR_ID_ANY_MOTION_WU:
{
ret = "Any motion wake up";
break;
}
case SMARTSENS_SENSOR_ID_EXCAMERA:
{
ret = "External camera trigger";
break;
}
case SMARTSENS_SENSOR_ID_GPS:
{
ret = "GPS";
break;
}
case SMARTSENS_SENSOR_ID_LIGHT:
{
ret = "Light";
break;
}
case SMARTSENS_SENSOR_ID_PROX:
{
ret = "Proximity";
break;
}
case SMARTSENS_SENSOR_ID_LIGHT_WU:
{
ret = "Light wake up";
break;
}
case SMARTSENS_SENSOR_ID_PROX_WU:
{
ret = "Proximity wake up";
break;
}
default:
{
if ( ( sensor_id >= SMARTSENS_SENSOR_ID_CUSTOM_START ) && ( sensor_id <= SMARTSENS_SENSOR_ID_CUSTOM_END ) )
{
ret = "Custom sensor ID ";
}
else
{
ret = "Undefined sensor ID ";
}
}
}
return ret;
}
// ------------------------------------------------------------------------ END
额外支持
资源
类别:环境