Measure magnetic fields across three axes (X, Y, and Z) with TLI493D-A2B6 and MK22FN512VLH12
For detailed magnetic field analysis or where the direction and magnitude of the magnetic field are critical

Published Mar 15, 2024
Click board™
Magneto 6 Click
Dev. board
Kinetis Clicker
Compiler
NECTO Studio
MCU
MK22FN512VLH12
Develop systems capable of precise 3D magnetic field mapping for innovative robotics, navigation, and security applications
A
A
Hardware Overview
How does it work?
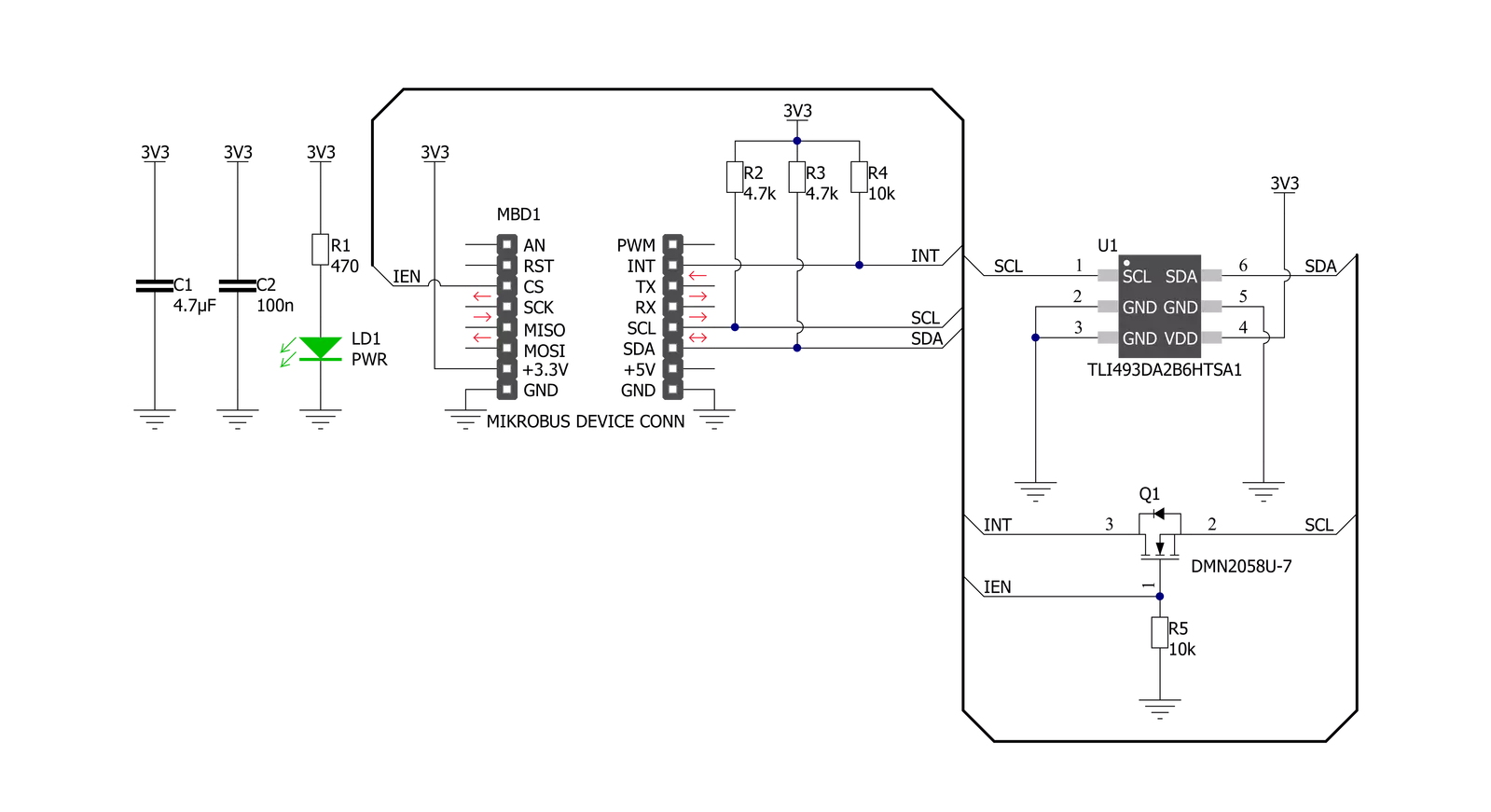
Magneto 6 Click is based on the TLI493D-A2B6, a low-power three-dimensional Hall effect sensor with an I2C interface from Infineon. Within its small 6-pin package, the sensor directly measures a magnetic field's X, Y, and Z components. This sensor offers accurate three-dimensional sensing with extremely low power consumption and consists of three main functional units. First is the power mode control system, containing a low-power oscillator, basic biasing, accurate restart, undervoltage detection, and a fast oscillator. Second, the sensing unit that contains the HALL biasing, HALL probes with multiplexers, successive tracking ADC, and a temperature sensor. Third, the I2C interface contains the register files. Some of the main characteristics of this sensor IC are 3D magnetic flux density sensing of ±160 mT, 12-bit
data resolution for each measurement direction plus 10-bit temperature sensor, programmable flux resolution down to 65 μT, and interrupt signal to indicate a valid measurement to the microcontroller. This sensor is equipped with different modes and a digital communication interface for a good adaptation. The I2C interface can be accessed in any power mode. The interrupt function is multiplexed with the I2C SCL pin and can be used to indicate measurement completion. Using an interrupt line is optional but highly recommended to ensure proper and efficient readout of the sensor data. Magneto 6 Click is ideally suited for measuring 3-dimensional movement within a magnetic field, linear slide movement, or 360° angle rotation. The magnetic measurement values are provided in the two complements with 12-bit or
8-bit resolutions in the registers with the symbols Bx, By, and Bz. By default, the temperature measurement is activated. The temperature measurement can be disabled if it is not needed and to increase the speed of the repetition of the magnetic values. This Click board™ uses an I2C communication interface designed to operate only with a 3.3V logic level. A proper logic voltage level conversion should be performed before the Click board™ is used with MCUs with logic levels of 5V. More information about the TLI493D-A2B6 can be found in the attached datasheet. The Click board™ comes equipped with a library that contains easy-to-use functions and a usage example that may be used as a reference for the development.

Features overview
Development board
Kinetis Clicker is a compact starter development board that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit ARM Cortex-M4 microcontroller, the MK22FN512VLH12 from NXP Semiconductor, a USB connector, LED indicators, buttons, a mikroProg connector, and a header for interfacing with external electronics. Thanks to its compact design with clear and easy-recognizable silkscreen markings, it provides a fluid and immersive working experience, allowing access
anywhere and under any circumstances. Each part of the Kinetis Clicker development kit contains the components necessary for the most efficient operation of the same board. In addition to the possibility of choosing the Kinetis Clicker programming method, using USB HID mikroBootloader, or through an external mikroProg connector for Kinetis programmer, the Clicker board also includes a clean and regulated power supply module for the development kit. The USB-MiniAB connection provides up to 500mA of current, which is more than enough to operate all
onboard and additional modules. All communication methods that mikroBUS™ itself supports are on this board, including the well-established mikroBUS™ socket, reset button, and several buttons and LED indicators. Kinetis Clicker is an integral part of the Mikroe ecosystem, allowing you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M4
MCU Memory (KB)
512
Silicon Vendor
NXP
Pin count
64
RAM (Bytes)
131072
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Kinetis Clicker as your development board.













Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for Magneto 6 Click driver.
Key functions:
magneto6_read_data- This function reads the measurements of the 3-axes magnetic field sensor in mT and the temperature sensor in degrees Celsiusmagneto6_read_reg- This function reads a desired number of data bytes starting from the selected register by using I2C serial interfacemagneto6_write_reg- This function writes a data byte to the selected register by using I2C serial interface
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief Magneto 6 Click example
*
* # Description
* This example demonstrates the use of Magneto 6 Click board by reading
* the magnetic field strength from 3 axes as well as the ambient temperature measurements.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and performs the Click default configuration.
*
* ## Application Task
* Reads data from the sensor and displays them on the USB UART once per second.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "magneto6.h"
static magneto6_t magneto6;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
magneto6_cfg_t magneto6_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
magneto6_cfg_setup( &magneto6_cfg );
MAGNETO6_MAP_MIKROBUS( magneto6_cfg, MIKROBUS_1 );
if ( I2C_MASTER_ERROR == magneto6_init( &magneto6, &magneto6_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( MAGNETO6_ERROR == magneto6_default_cfg ( &magneto6 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
magneto6_data_t data_res;
if ( MAGNETO6_OK == magneto6_read_data ( &magneto6, &data_res ) )
{
log_printf( &logger, " X data: %.1f mT\r\n", data_res.x_data );
log_printf( &logger, " Y data: %.1f mT\r\n", data_res.y_data );
log_printf( &logger, " Z data: %.1f mT\r\n", data_res.z_data );
log_printf( &logger, " Temperature: %.2f degC\r\n\n", data_res.temperature );
}
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END