Achieve extremely quiet operation and smooth motion of bipolar stepper motors using the TMC5130 and PIC32MX470F512H
Universal high-voltage driver for two-phase bipolar motors with up to 2A motor current per coil

Published Mar 15, 2024
Click board™
Silent Step Click
Dev. board
6LoWPAN clicker
Compiler
NECTO Studio
MCU
PIC32MX470F512H
Advance your stepper motor control with a blend of high power and cutting-edge features, ensuring an operation that's both smooth and whisper-quiet
A
A
Hardware Overview
How does it work?
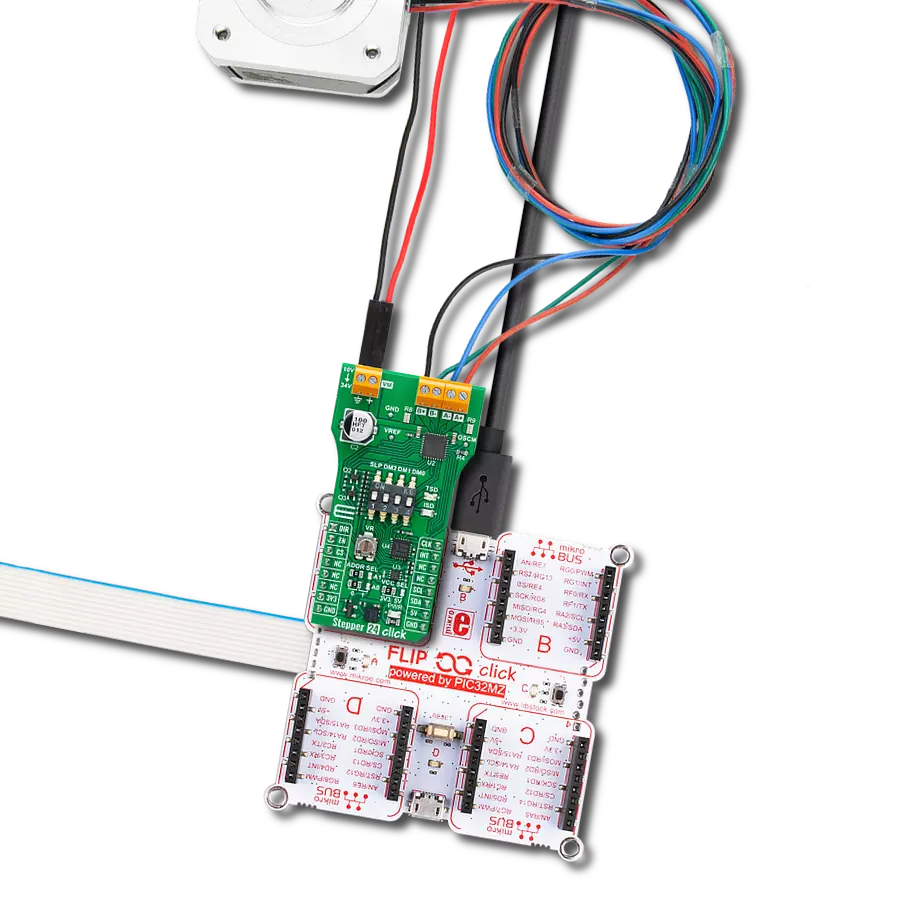
Silent Step Click is based on the TMC5130, a high-voltage controller/driver for a two-phase bipolar stepper motor from Analog Devices. As mentioned, this device has many different features that allow the driver to be used almost autonomously. Two control interfaces exist: the SPI serial interface and the STEP/DIR interface. The SPI interface writes control information to the chip and reads back status information. This interface must be used to initialize the parameters and modes necessary to enable driving the motor. The motion of the motor can be controlled by using the STEP and DIR signals or through the SPI interface alone. Technologies, such as stallGuard2™ - high precision sensorless motor load detection; spreadCycle™ - highly dynamic motor current control; stealthChop™ - extremely quiet operation and smooth motion, microPlayer™ - interpolation with 256 microsteps, help to achieve high autonomy and smooth motion of the driven motor, even by using the STEP and DIR input pins to set the direction and step propagation. The TMC5130 supports two motor driver control modes: STEP/DIR and SPI modes. STEP/DIR mode is also referred to as the legacy mode. The device is operated similarly to other pin-driven step motor controllers/drivers – the step propagation is controlled by pulses on the STEP input, and the
DIR pin determines the direction. In SPI mode, the user has direct access to the motor's current sign and magnitude by setting the parameters in the DRVCTRL Register. All working parameters can be configured and controlled via the SPI interface in both modes. Also, the power and thermal data can be returned to the MCU for further analysis and optimization. In STEP/DIR mode, the microPlyer STEP pulse interpolator brings the smooth motor operation of high-resolution microstepping to applications initially designed for coarser stepping and reduces pulse bandwidth. MicroPlyer produces 16 microsteps at 256x resolution for each active edge on the STP pin of the Silent Step Click. The application may need to change the microstepping resolution to get the best performance from the motor. The currents through both motor coils are controlled using choppers, which work independently of each other. Two chopper modes are available: a new high-performance chopper algorithm called spreadCycle and a proven constant off-time chopper mode. The constant off-time mode cycles through three phases: on, fast decay, and slow decay. The spreadCycle mode cycles through four phases: on, slow decay, fast decay, and a second slow decay. The current through the motor coils has to be measured to achieve all the previously mentioned features.
Because of the high power output of the TMC5130, external shunt resistors are recommended. Therefore, the Silent Step click has onboard carefully selected, low-inductance type 0.1 Ohm shunt resistors. This minimizes measurement imperfections caused by the switching spikes from the MOSFET bridges, for example, and maximizes the efficiency of the TMC5130. The STEP, DIR, SD_MODE, and SPI_MODE pins of the TMC5130 are directly routed to the mikroBUS™ pins PWM, INT, RST, and AN, and marked as STP, DIR, SDM, and SPM respectively. The digital I/O pins' logic levels are easily adjustable by setting the desired voltage to the VCC_IO pin. Therefore, the interface logic level on the Silent Step Click can be easily configured for 3.3 V or 5 V logic by moving the VSEL jumper to the respective voltage, which allows both 3.3V and 5V MCUs to be interfaced with this Click board™. The power supply for the bipolar stepper motor can be connected to the terminal's VM and GND inputs. The connected voltage should stay within the range between 5V and 46V. The rest of the terminals allow bipolar stepper motor coils to be connected: A1 and A2 terminal inputs connect the first coil, while the B1 and B2 inputs connect the second motor coil.

Features overview
Development board
6LoWPAN Clicker is a compact starter development board that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit PIC microcontroller, the PIC32MX470F512H from Microchip, a USB connector, LED indicators, buttons, a mikroProg connector, and a header for interfacing with external electronics. Along with this microcontroller, the board also contains a 2.4GHz ISM band transceiver, allowing you to add wireless communication to your target application. Its compact design provides a fluid and immersive working experience, allowing access anywhere
and under any circumstances. Each part of the 6LoWPAN Clicker development kit contains the components necessary for the most efficient operation of the same board. In addition to the possibility of choosing the 6LoWPAN Clicker programming method, using USB HID mikroBootloader, or through an external mikroProg connector for PIC, dsPIC, or PIC32 programmer, the Clicker board also includes a clean and regulated power supply module for the development kit. The USB Micro-B connection can provide up to 500mA of current for the Clicker board, which is more than enough to operate all onboard and additional modules, or it can power
over two standard AA batteries. All communication methods that mikroBUS™ itself supports are on this board, including the well-established mikroBUS™ socket, reset button, and several buttons and LED indicators. 6LoWPAN Clicker is an integral part of the Mikroe ecosystem, allowing you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC32
MCU Memory (KB)
512
Silicon Vendor
Microchip
Pin count
64
RAM (Bytes)
131072
You complete me!
Accessories
The 28BYJ-48 is an adaptable 5VDC stepper motor with a compact design, ideal for various applications. It features four phases, a speed variation ratio of 1/64, and a stride angle of 5.625°/64 steps, allowing precise control. The motor operates at a frequency of 100Hz and has a DC resistance of 50Ω ±7% at 25°C. It boasts an idle in-traction frequency greater than 600Hz and an idle out-traction frequency exceeding 1000Hz, ensuring reliability in different scenarios. With a self-positioning torque and in-traction torque both exceeding 34.3mN.m at 120Hz, the 28BYJ-48 offers robust performance. Its friction torque ranges from 600 to 1200 gf.cm, while the pull-in torque is 300 gf.cm. This motor makes a reliable and efficient choice for your stepper motor needs.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic

Step by step
Project assembly

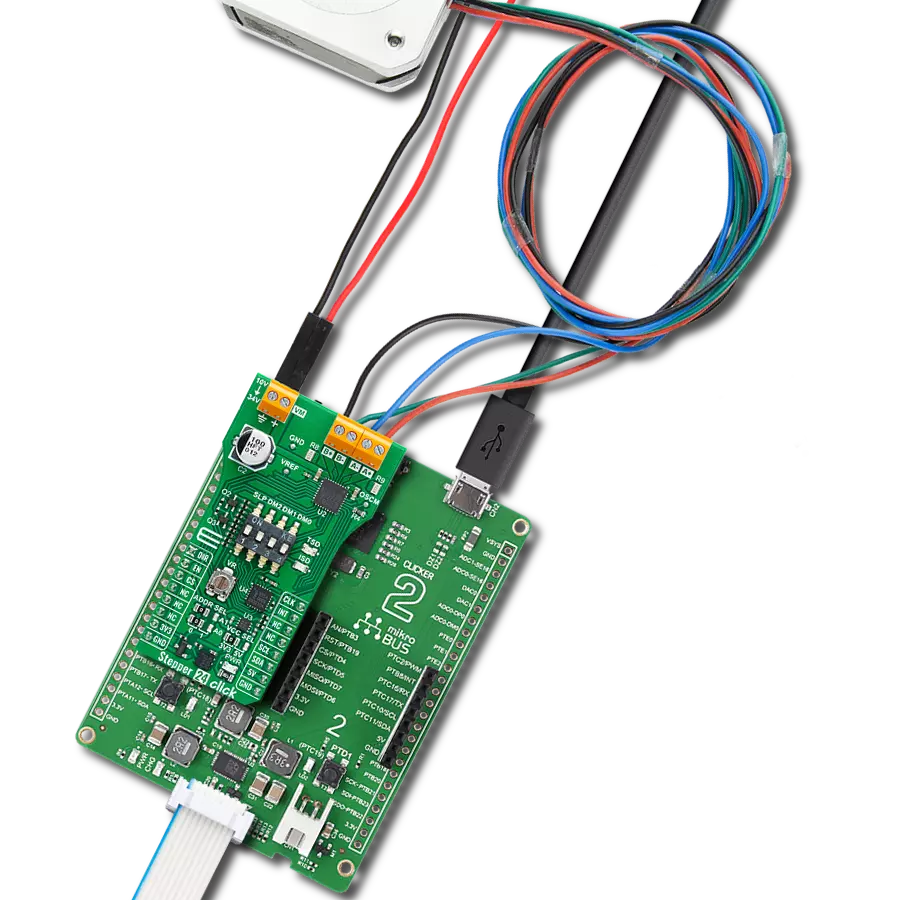
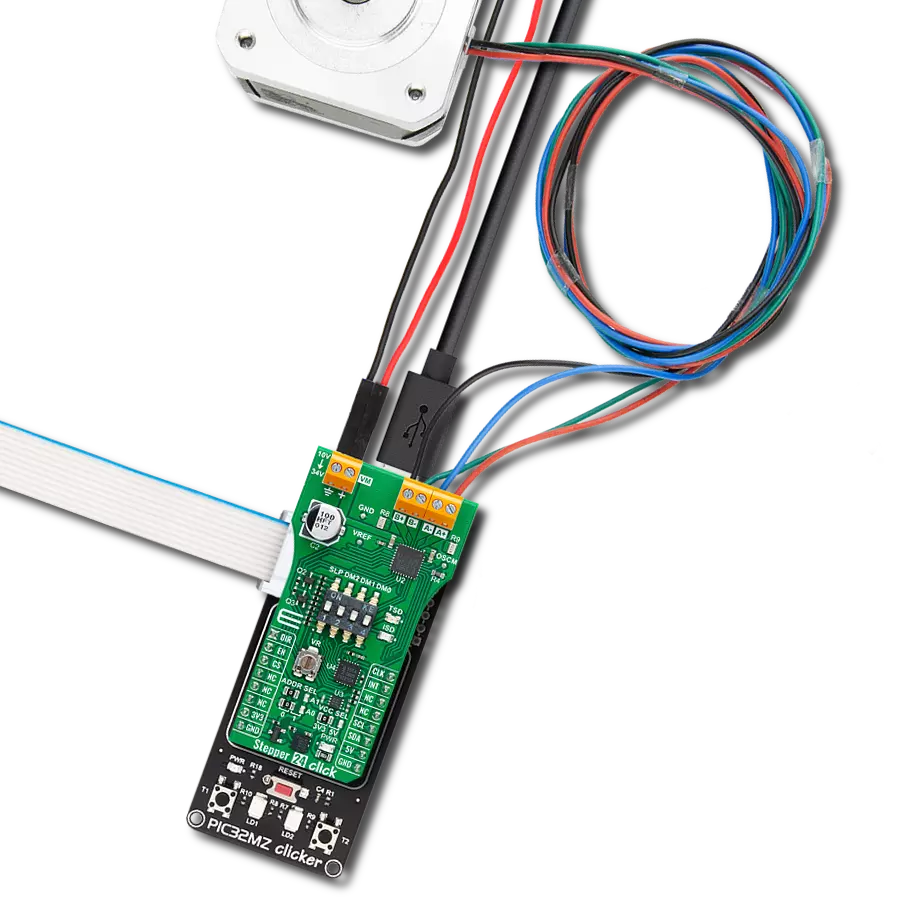
Start by selecting your development board and Click board™. Begin with the 6LoWPAN clicker as your development board.














Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for Silent Step Click driver.
Key functions:
silentstep_set_step_res- This function sets the microstep resolution bits in CHOPCONF registersilentstep_set_direction- This function sets the motor direction by setting the DIR pin logic statesilentstep_drive_motor- This function drives the motor for the specific number of steps at the selected speed
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief Silent Step Click example
*
* # Description
* This example demonstrates the use of the Silent Step Click board by driving the
* motor in both directions for a desired number of steps.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and performs the Click default configuration.
*
* ## Application Task
* Drives the motor clockwise for 200 full steps and then counter-clockiwse for 200 half
* steps and 400 quarter steps with 2 seconds delay on driving mode change. All data is
* being logged on the USB UART where you can track the program flow.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "silentstep.h"
static silentstep_t silentstep;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
silentstep_cfg_t silentstep_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
silentstep_cfg_setup( &silentstep_cfg );
SILENTSTEP_MAP_MIKROBUS( silentstep_cfg, MIKROBUS_1 );
if ( SPI_MASTER_ERROR == silentstep_init( &silentstep, &silentstep_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( SILENTSTEP_ERROR == silentstep_default_cfg ( &silentstep ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
log_printf ( &logger, " Move 200 full steps clockwise, speed: slow\r\n\n" );
silentstep_set_direction ( &silentstep, SILENTSTEP_DIR_CW );
silentstep_set_step_res ( &silentstep, SILENTSTEP_MRES_FULLSTEP );
silentstep_drive_motor ( &silentstep, 200, SILENTSTEP_SPEED_SLOW );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf ( &logger, " Move 200 half steps counter-clockwise, speed: medium\r\n\n" );
silentstep_set_direction ( &silentstep, SILENTSTEP_DIR_CCW );
silentstep_set_step_res ( &silentstep, SILENTSTEP_MRES_2 );
silentstep_drive_motor ( &silentstep, 200, SILENTSTEP_SPEED_MEDIUM );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf ( &logger, " Move 400 quarter steps counter-clockwise, speed: fast\r\n\n" );
silentstep_set_direction ( &silentstep, SILENTSTEP_DIR_CCW );
silentstep_set_step_res ( &silentstep, SILENTSTEP_MRES_4 );
silentstep_drive_motor ( &silentstep, 400, SILENTSTEP_SPEED_FAST );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END