Enhance industrial device communication with the DS2485 and PIC32MZ2048EFM100
An advanced 1-Wire master with EEPROM memory

Published May 16, 2024
Click board™
I2C 1-Wire 2 Click
Dev. board
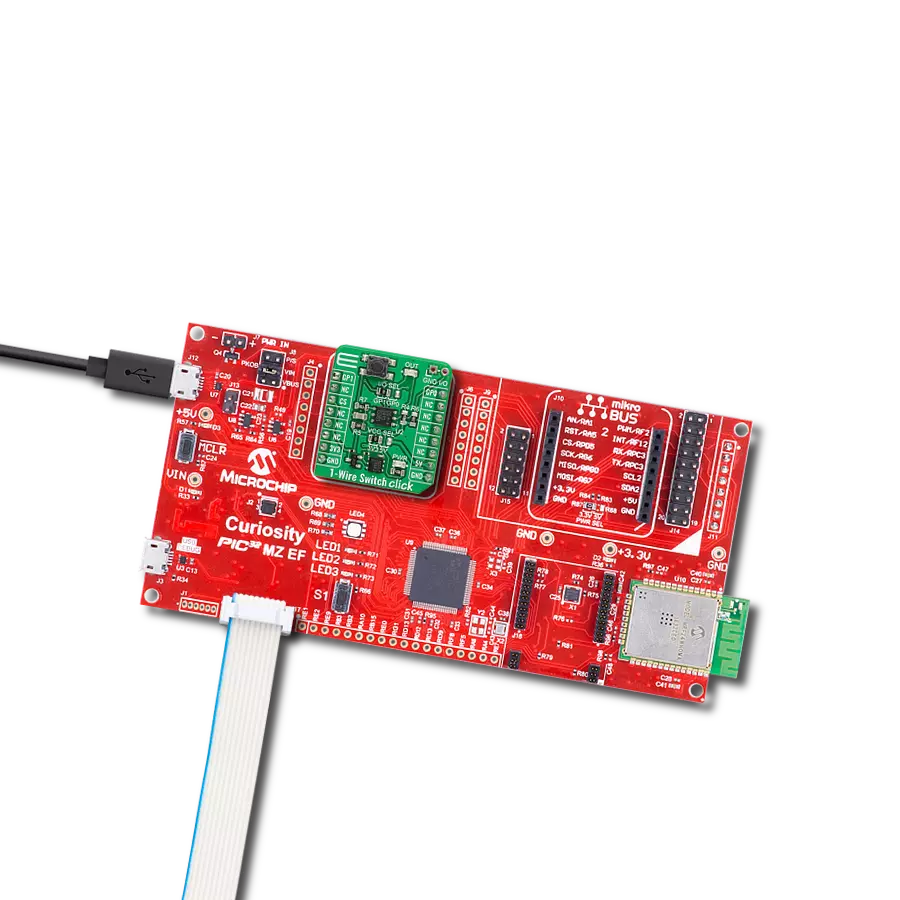
Curiosity PIC32 MZ EF
Compiler
NECTO Studio
MCU
PIC32MZ2048EFM100
Simplify communication by allowing I2C devices to talk to 1-Wire devices easily, especially in industrial settings.
A
A
Hardware Overview
How does it work?
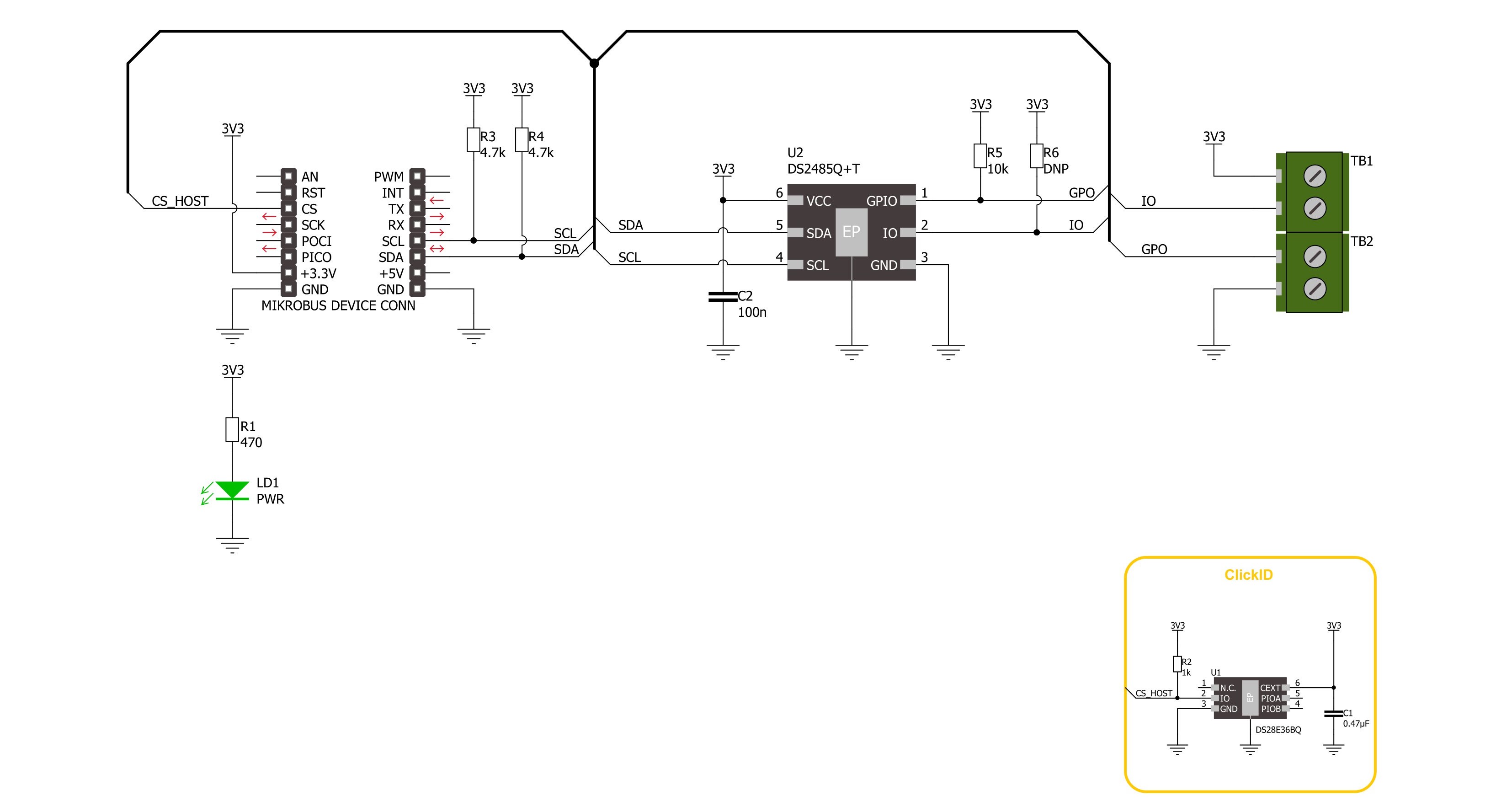
I2C 1-Wire 2 Click is based on the DS2485, an advanced 1-Wire master with memory from Analog Devices. The core function of the DS2485 involves facilitating the protocol transition between the I2C master interface and any connected 1-Wire slave devices. It is equipped with internal, adjustable timers that manage the 1-Wire signaling, thereby offloading the host processor of the duty to produce timing-sensitive 1-Wire signals. This feature allows for both regular and accelerated 1-Wire communication rates. An internal weak pull-up can pull the 1-Wire line up, an external resistor by populating R6 with a chosen resistance value, or combining internal and external pull-up methods for enhanced flexibility. This Click board™ is predominantly utilized in industrial sensor and tool
applications, temporary consumables, and for identifying printer cartridges. Upon receiving commands and data, the DS2485's input/output management unit takes over the execution of crucial 1-Wire operations such as the reset/presence-detection cycle, byte reading and writing, block reading and writing, single-bit read/write operations, executing triplets for ROM search activities, and handling complete command sequences for 1-Wire authenticators—all without the need for continuous host processor intervention. Featuring a 0.75Kb EEPROM array, the DS2485 offers general-purpose, reprogrammable memory distributed across three 32-byte pages at even-numbered addresses, while odd-numbered pages are locked and inaccessible.
Each of these even-numbered pages comes with optional security settings. For communication with the host processor, the DS2485 uses an I2C interface, supporting both standard and fast modes, with communication speeds up to 1MHz. Additionally, the device's general-purpose I/O pin, available on the GPO terminal, can be managed independently via specific commands. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. Also, it comes equipped with a library containing functions and an example code that can be used as a reference for further development.

Features overview
Development board
Curiosity PIC32 MZ EF development board is a fully integrated 32-bit development platform featuring the high-performance PIC32MZ EF Series (PIC32MZ2048EFM) that has a 2MB Flash, 512KB RAM, integrated FPU, Crypto accelerator, and excellent connectivity options. It includes an integrated programmer and debugger, requiring no additional hardware. Users can expand
functionality through MIKROE mikroBUS™ Click™ adapter boards, add Ethernet connectivity with the Microchip PHY daughter board, add WiFi connectivity capability using the Microchip expansions boards, and add audio input and output capability with Microchip audio daughter boards. These boards are fully integrated into PIC32’s powerful software framework, MPLAB Harmony,
which provides a flexible and modular interface to application development a rich set of inter-operable software stacks (TCP-IP, USB), and easy-to-use features. The Curiosity PIC32 MZ EF development board offers expansion capabilities making it an excellent choice for a rapid prototyping board in Connectivity, IOT, and general-purpose applications.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Curiosity PIC32 MZ EF as your development board.














Software Support
Library Description
This library contains API for I2C 1-Wire 2 Click driver.
Key functions:
i2c1wire2_master_reset- This function is used to reset device, and return all configuration registers to the default values.i2c1wire2_write_port_cfg- This function is used to write a 1-Wire configuration register.i2c1wire2_search- This function is used to perform 1-Wire Search algorithm and return one device ROMID.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief I2C 1-Wire 2 Click example
*
* # Description
* This example demonstrates the use of the I2C 1-Wire 2 Click board
* by searching if a device is connected and reading its ROMID.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization of I2C module, log UART and perform Click default configuration.
*
* ## Application Task
* Performing 1-Wire Search algorithm to find if any device is connected.
* If a device is connected and detected, its ROMID will be read and displayed.
*
* @author Stefan Ilic
*
*/
#include "board.h"
#include "log.h"
#include "i2c1wire2.h"
static i2c1wire2_t i2c1wire2;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
i2c1wire2_cfg_t i2c1wire2_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
i2c1wire2_cfg_setup( &i2c1wire2_cfg );
I2C1WIRE2_MAP_MIKROBUS( i2c1wire2_cfg, MIKROBUS_1 );
if ( I2C_MASTER_ERROR == i2c1wire2_init( &i2c1wire2, &i2c1wire2_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( I2C1WIRE2_ERROR == i2c1wire2_default_cfg ( &i2c1wire2 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
err_t error_flag;
uint8_t flag;
uint8_t last_flag;
uint8_t rom_id[ 8 ] = { 0 };
#define I2C1WIRE2_DEVICE_SEARCH_CODE 0xF0
error_flag = i2c1wire2_search ( &i2c1wire2, &flag, rom_id, &last_flag, I2C1WIRE2_SEARCH_RESET |
I2C1WIRE2_SEARCH_1WIRE_RESET, I2C1WIRE2_DEVICE_SEARCH_CODE );
if ( I2C1WIRE2_OK == error_flag )
{
if ( I2C1WIRE2_RESULT_BYTE_OK == flag )
{
log_printf( &logger, " Device found: \r\n" );
log_printf( &logger, " Device ROMID: 0x" );
for ( uint8_t n_cnt = 0; n_cnt < 8; n_cnt++ )
{
log_printf( &logger, "%.2X", ( uint16_t ) rom_id[ n_cnt ] );
}
log_printf( &logger, " \r\n" );
log_printf( &logger, " Last device flag %d \r\n", last_flag );
}
else if ( I2C1WIRE2_NO_DEVICE_DETECTED == flag )
{
log_printf( &logger, " No device detected \r\n" );
}
else if ( I2C1WIRE2_NO_PRESENCE_PULS == flag )
{
log_printf( &logger, " No presence puls \r\n" );
}
}
else
{
log_printf( &logger, " ERROR \r\n" );
}
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:1-Wire