Attain global connection and precise location tracking with LENA-R8 and STM32F030R8
For developers targeting the tracking and telematics sectors

Published Apr 01, 2024
Click board™
4G LTE&GNSS Click
Dev. board
Nucleo-64 with STM32F030R8 MCU
Compiler
NECTO Studio
MCU
STM32F030R8
Achieve universal connectivity and precise global tracking capabilities, thanks to LENA-R8's support for 14 LTE bands, four GSM/GPRS bands, and integrated u-blox GNSS technology
A
A
Hardware Overview
How does it work?
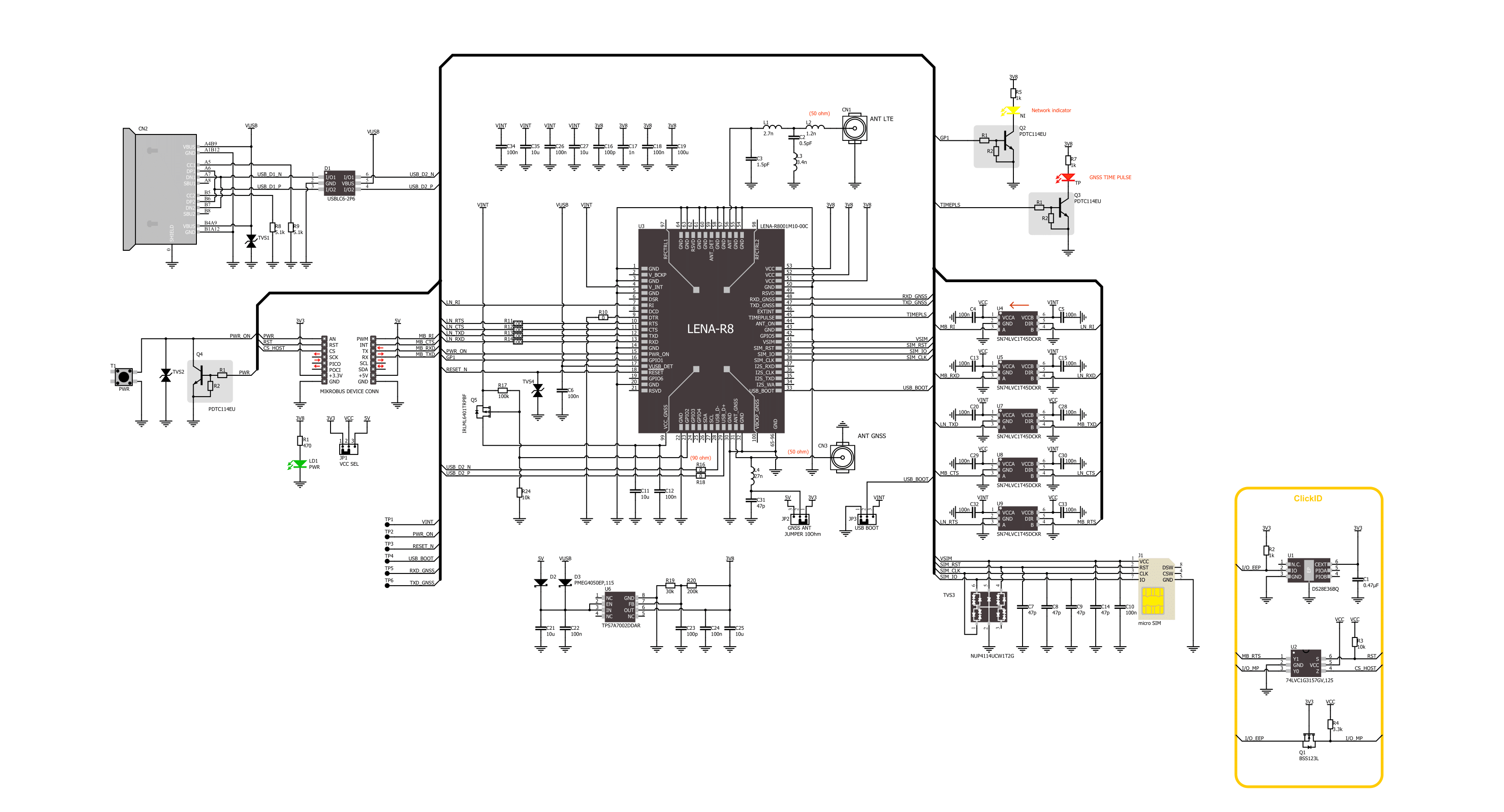
4G LTE&GNSS Click is based on the LENA-R8 (LENA-R8001M10-00C), a multi-mode LTE Cat 1bis module with wide network support from Trasna. This cellular module has 14 LTE bands and four GSM/GPRS bands, delivering universal network connectivity and comprehensive global coverage. Its integrated Trasna GNSS functionality positions it as a premier choice for global tracking and telematics applications, where precision and reliability are paramount. The LENA-R8's capability to support connectivity and location services natively simplifies the deployment of devices in cloud-based ecosystems, offering streamlined solutions for Connectivity as a Service (CaaS) and Location as a Service (LaaS). This makes it an invaluable component for developers seeking to create smaller, more efficient solutions without compromising GNSS performance or global accessibility. Beyond its global LTE Cat 1bis connectivity, the LENA-R8 excels in facilitating a wide array of IoT applications, particularly in the tracking and telematics domains. Its compatibility with a broad spectrum of LTE and 2G bands ensures optimal roaming coverage across different geographical regions, enabling the creation of IoT devices that are truly global with a single product SKU. The module's high level of integration includes support for MQTT Anywhere services on the Thingstream platform, enhancing its utility for seamless global roaming. It also boasts concurrent reception capabilities for up to four GNSS (GPS, GLONASS, Galileo, and BeiDou), with GPS and Galileo being the default configuration. This multifunctionality, combined with dedicated interfaces for the cellular modem and GNSS subsystems, allows for independent operation and flexible usage, optimizing performance and power efficiency. The LENA-R8's support for CellLocate, a network-based location service, further underscores its versatility and suitability for a wide range of high-performance, location-dependent applications. The LENA-R8 communicates with the host MCU using the UART interface with commonly
used UART RX and TX pins with the hardware flow control pins UART CTS, RTS, RI (Clear to Send, Ready to Send, and Ring Indicator). It operates at 115200 bps by default configuration to transmit and exchange data with the host MCU. Besides UART pins, this Click board™ also uses an RST pin as an abrupt hardware reset of LENA-R8. This reset is performed without storing the current parameter settings, and a clean network detach. The LENA-R8 also includes a USB High-Speed 2.0 compliant interface with a maximum 480 Mbit/s data rate. The module itself acts as a USB device and can be connected to any compatible USB host. The interface is available for communication with the external host application processor (AT commands, data, FW update by means of FOAT), FW update by means of a dedicated tool, and diagnostics. In addition, on the back side of the board, there is a USB BOOT jumper that allows you to select the Boot mode. By placing it at position 1, the FW update by the dedicated tool over the USB interface is enabled, and at position 0 for boot in normal operating mode. In addition to its integrated Power (PWR) button for manual activation, the LENA-R8 module can be powered through an external PWR pin. Furthermore, the module has two distinct LED indicators to convey critical operational status information visually. The yellow LED, labeled NI, serves as a network status indicator, offering immediate feedback on the module's connectivity status within a network. This is crucial for troubleshooting and confirming successful network integration. Similarly, the red LED, labeled TP, acts as a time pulse indicator, emitting a precise signal to denote time synchronization events. This is especially beneficial for applications requiring high timing accuracy, such as time-sensitive data collection or GPS-based positioning. The board features u.Fl connectors for LTE and GNSS antennas, accommodating accessories like the LTE Flat Rotation Antenna and the GNSS Active External Antenna, in combination with an IPEX-SMA cable
for flexible and efficient connectivity options. This setup ensures optimal signal strength and quality for local and satellite communications. Notably, the GNSS antenna connection includes a power selection feature, allowing users to adjust the antenna's power supply according to specific requirements, enhancing the precision and reliability of satellite navigation. Additionally, the board is equipped with a nano SIM card holder that supports both 1.8V and 3.0V SIM cards, ensuring compatibility with a wide range of cellular networks and allowing users to select the most appropriate service provider for their particular use case. This Click board™ also uses the TPS7A7002, a Low-Dropout Regulator (LDO) from Texas Instruments, to generate the required 3.8V power supply necessary for the module's optimal operation. This power is derived from the 5V mikroBUS™ power rail or a USB connection if available, ensuring versatility in power sourcing. The board has several test points for further diagnostics and operational adjustments. TP1 is dedicated to diagnosing the module's internal conditions, providing a typical output of 1.8V when the cellular component of the module is activated. This allows for real-time monitoring of the module's power state. TP2 presents the same function as the PWR pin, TP3 as Reset, and TP4 as USB Boot. TP5 and TP6 connect the GNSS UART, enabling serial communication between the internal Trasna M10 GNSS chipset and an external host. This feature allows for direct data exchange and configuration between the GNSS module and the host device, enhancing the module's functionality and flexibility in GNSS applications. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
Nucleo-64 with STM32F030R8 MCU offers a cost-effective and adaptable platform for developers to explore new ideas and prototype their designs. This board harnesses the versatility of the STM32 microcontroller, enabling users to select the optimal balance of performance and power consumption for their projects. It accommodates the STM32 microcontroller in the LQFP64 package and includes essential components such as a user LED, which doubles as an ARDUINO® signal, alongside user and reset push-buttons, and a 32.768kHz crystal oscillator for precise timing operations. Designed with expansion and flexibility in mind, the Nucleo-64 board features an ARDUINO® Uno V3 expansion connector and ST morpho extension pin
headers, granting complete access to the STM32's I/Os for comprehensive project integration. Power supply options are adaptable, supporting ST-LINK USB VBUS or external power sources, ensuring adaptability in various development environments. The board also has an on-board ST-LINK debugger/programmer with USB re-enumeration capability, simplifying the programming and debugging process. Moreover, the board is designed to simplify advanced development with its external SMPS for efficient Vcore logic supply, support for USB Device full speed or USB SNK/UFP full speed, and built-in cryptographic features, enhancing both the power efficiency and security of projects. Additional connectivity is
provided through dedicated connectors for external SMPS experimentation, a USB connector for the ST-LINK, and a MIPI® debug connector, expanding the possibilities for hardware interfacing and experimentation. Developers will find extensive support through comprehensive free software libraries and examples, courtesy of the STM32Cube MCU Package. This, combined with compatibility with a wide array of Integrated Development Environments (IDEs), including IAR Embedded Workbench®, MDK-ARM, and STM32CubeIDE, ensures a smooth and efficient development experience, allowing users to fully leverage the capabilities of the Nucleo-64 board in their projects.

Microcontroller Overview
MCU Card / MCU
Architecture
ARM Cortex-M0
MCU Memory (KB)
64
Silicon Vendor
STMicroelectronics
Pin count
64
RAM (Bytes)
8192
You complete me!
Accessories
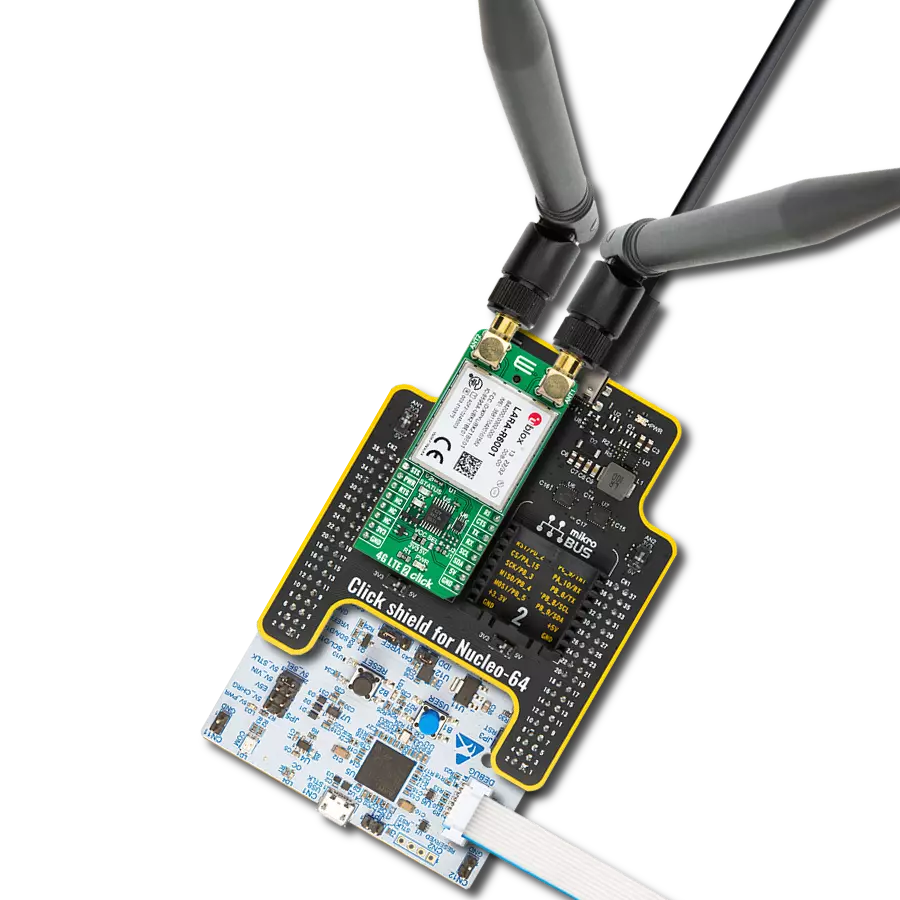
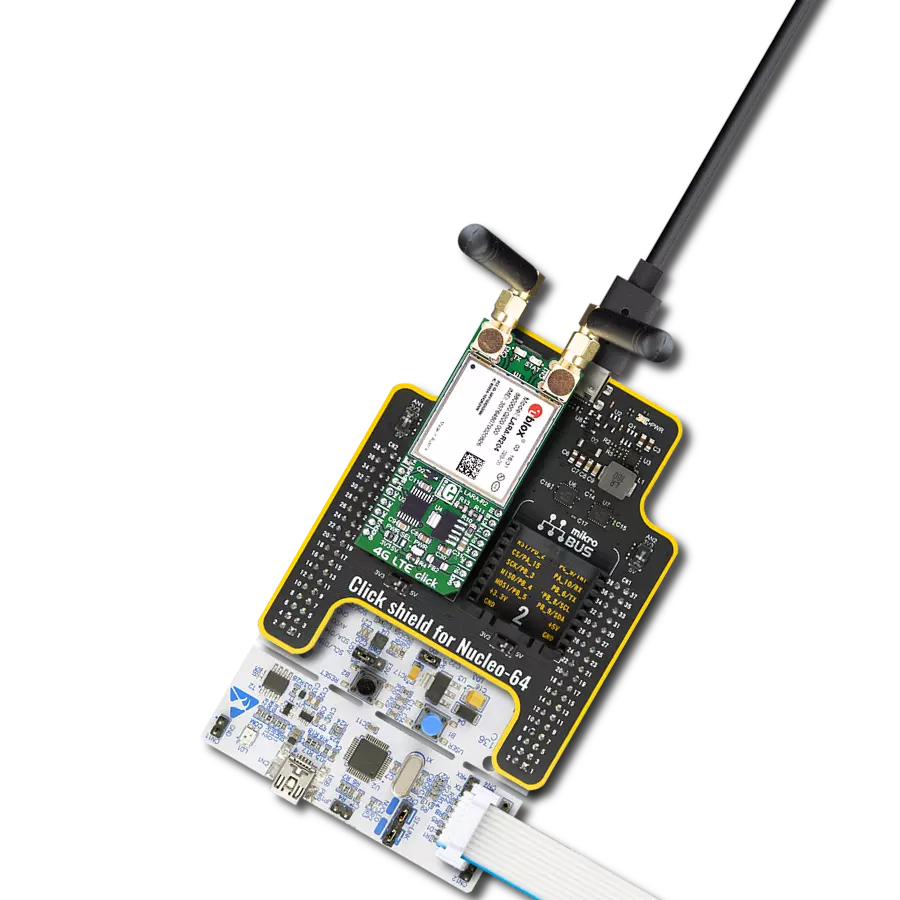
Click Shield for Nucleo-64 comes equipped with two proprietary mikroBUS™ sockets, allowing all the Click board™ devices to be interfaced with the STM32 Nucleo-64 board with no effort. This way, Mikroe allows its users to add any functionality from our ever-growing range of Click boards™, such as WiFi, GSM, GPS, Bluetooth, ZigBee, environmental sensors, LEDs, speech recognition, motor control, movement sensors, and many more. More than 1537 Click boards™, which can be stacked and integrated, are at your disposal. The STM32 Nucleo-64 boards are based on the microcontrollers in 64-pin packages, a 32-bit MCU with an ARM Cortex M4 processor operating at 84MHz, 512Kb Flash, and 96KB SRAM, divided into two regions where the top section represents the ST-Link/V2 debugger and programmer while the bottom section of the board is an actual development board. These boards are controlled and powered conveniently through a USB connection to program and efficiently debug the Nucleo-64 board out of the box, with an additional USB cable connected to the USB mini port on the board. Most of the STM32 microcontroller pins are brought to the IO pins on the left and right edge of the board, which are then connected to two existing mikroBUS™ sockets. This Click Shield also has several switches that perform functions such as selecting the logic levels of analog signals on mikroBUS™ sockets and selecting logic voltage levels of the mikroBUS™ sockets themselves. Besides, the user is offered the possibility of using any Click board™ with the help of existing bidirectional level-shifting voltage translators, regardless of whether the Click board™ operates at a 3.3V or 5V logic voltage level. Once you connect the STM32 Nucleo-64 board with our Click Shield for Nucleo-64, you can access hundreds of Click boards™, working with 3.3V or 5V logic voltage levels.

LTE Flat Rotation Antenna is a versatile choice for boosting the performance of 3G/4G LTE devices. With a wide frequency range of 700-2700MHz, it ensures optimal connectivity on major cellular bands worldwide. This flat antenna features an SMA male connector, making it easy to attach directly to your device or SMA module connector. One of its standout features is its adjustable angle, which can be set in 45⁰ increments (0⁰/45⁰/90⁰), allowing you to fine-tune the antenna's orientation for maximum signal reception. With an impedance of 50Ω and a VSW Ratio of <2.0:1, this antenna ensures a reliable and efficient connection. Its 5dB gain, vertical polarization, and omnidirectional radiation pattern enhance signal strength, making it suitable for various applications. Measuring 196mm in length and 38mm in width, this antenna offers a compact yet effective solution for improving your connectivity. With a maximum input power of 50W, it can handle the demands of various devices.

GNSS Active External Antenna is a unique multi-band type of antenna coming from u-blox that is the perfect selection for high precision GNSS applications, which require highly accurate location abilities such as RTK. The ANN-MB-00 is a multi-band (L1, L2/E5b/B2I) active GNSS antenna with a 5m cable and SMA connector. The antenna supports GPS, GLONASS, Galileo, and BeiDou and includes a high-performance multi-band RHCP dual-feed patch antenna element, a built-in high-gain LNA with SAW pre-filtering, and a 5 m antenna cable with SMA connector, and is waterproof.

IPEX-SMA cable is a type of RF (radio frequency) cable assembly. "IPEX" refers to the IPEX connector, a miniature coaxial connector commonly used in small electronic devices. "SMA" stands for SubMiniature Version A and is another coaxial connector commonly used in RF applications. An IPEX-SMA cable assembly has an IPEX connector on one end and an SMA connector on the other, allowing it to connect devices or components that use these specific connectors. These cables are often used in applications like WiFi or cellular antennas, GPS modules, and other RF communication systems where a reliable and low-loss connection is required.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly
Start by selecting your development board and Click board™. Begin with the Nucleo-64 with STM32F030R8 MCU as your development board.















Software Support
Library Description
This library contains API for 4G LTE&GNSS Click driver.
Key functions:
c4gltegnss_set_sim_apn- This function sets APN for sim cardc4gltegnss_send_sms_text- This function sends text message to a phone numberc4gltegnss_parse_gga- This function parses the GGA data from the read response buffer
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief 4G LTE GNSS Click Example.
*
* # Description
* Application example shows device capability of connecting to the network and
* sending SMS or TCP/UDP messages, or retrieving data from GNSS using standard "AT" commands.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver, restarts the device, and after that tests the communication by sending "AT" command.
*
* ## Application Task
* Application task is split in few stages:
* - C4GLTEGNSS_CONFIGURE_FOR_NETWORK:
* Sets configuration to device to be able to connect to the network (used only for SMS or TCP/UDP demo examples).
*
* - C4GLTEGNSS_WAIT_FOR_CONNECTION:
* Waits for the network registration indicated via CREG URC event and then checks
* the connection status (used only for SMS or TCP/UDP demo examples).
*
* - C4GLTEGNSS_CONFIGURE_FOR_EXAMPLE:
* Sets the device configuration for sending SMS or TCP/UDP messages or for retrieving data from GNSS
* depending on the selected demo example.
*
* - C4GLTEGNSS_EXAMPLE:
* Depending on the selected demo example, it sends an SMS message (in PDU or TXT mode) or TCP/UDP message or
* waits for the GPS fix to retrieve location info from GNSS.
*
* By default, the TCP/UDP example is selected.
*
* ## Additional Function
* - static void c4gltegnss_clear_app_buf ( void )
* - static void c4gltegnss_log_app_buf ( void )
* - static err_t c4gltegnss_process ( void )
* - static void c4gltegnss_error_check ( err_t error_flag )
* - static err_t c4gltegnss_rsp_check ( uint8_t *rsp )
* - static err_t c4gltegnss_config_for_network ( void )
* - static err_t c4gltegnss_check_connection ( void )
* - static err_t c4gltegnss_config_for_example ( void )
* - static err_t c4gltegnss_example ( void )
*
* @note
* In order for the examples to work (except GNSS example), user needs to set the APN and SMSC (SMS PDU mode only)
* of entered SIM card as well as the phone number (SMS mode only) to which he wants to send an SMS.
* Enter valid values for the following macros: SIM_APN, SIM_SMSC and PHONE_NUMBER_TO_MESSAGE.
* Example:
SIM_APN "internet"
SIM_SMSC "+381610401"
PHONE_NUMBER_TO_MESSAGE "+381659999999"
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "c4gltegnss.h"
#include "conversions.h"
// Example selection macros
#define EXAMPLE_TCP_UDP 0 // Example of sending messages to a TCP/UDP echo server
#define EXAMPLE_SMS 1 // Example of sending SMS to a phone number
#define EXAMPLE_GNSS 2 // Example of retrieving location info from GNSS
#define DEMO_EXAMPLE EXAMPLE_TCP_UDP // Example selection macro
// SIM APN config
#define SIM_APN "internet" // Set valid SIM APN
// SMS example parameters
#define SIM_SMSC "" // Set valid SMS Service Center Address - only in SMS PDU mode
#define PHONE_NUMBER_TO_MESSAGE "" // Set Phone number to message
#define SMS_MODE "1" // SMS mode: "0" - PDU, "1" - TXT
// TCP/UDP example parameters
#define REMOTE_IP "77.46.162.162" // TCP/UDP echo server IP address
#define REMOTE_PORT "51111" // TCP/UDP echo server port
// Message content
#define MESSAGE_CONTENT "4G LTE GNSS Click board - demo example."
// Application buffer size
#define APP_BUFFER_SIZE 256
#define PROCESS_BUFFER_SIZE 256
/**
* @brief Example states.
* @details Predefined enum values for application example state.
*/
typedef enum
{
C4GLTEGNSS_CONFIGURE_FOR_NETWORK = 1,
C4GLTEGNSS_WAIT_FOR_CONNECTION,
C4GLTEGNSS_CONFIGURE_FOR_EXAMPLE,
C4GLTEGNSS_EXAMPLE
} c4gltegnss_example_state_t;
static c4gltegnss_t c4gltegnss;
static log_t logger;
/**
* @brief Application example variables.
* @details Variables used in application example.
*/
static uint8_t app_buf[ APP_BUFFER_SIZE ] = { 0 };
static int32_t app_buf_len = 0;
static err_t error_flag = C4GLTEGNSS_OK;
static c4gltegnss_example_state_t example_state;
/**
* @brief 4G LTE GNSS clearing application buffer.
* @details This function clears memory of application buffer and reset its length.
* @note None.
*/
static void c4gltegnss_clear_app_buf ( void );
/**
* @brief 4G LTE GNSS log application buffer.
* @details This function logs data from application buffer to USB UART.
* @note None.
*/
static void c4gltegnss_log_app_buf ( void );
/**
* @brief 4G LTE GNSS data reading function.
* @details This function reads data from device and concatenates data to application buffer.
* @return @li @c 0 - Read some data.
* @li @c -1 - Nothing is read.
* See #err_t definition for detailed explanation.
* @note None.
*/
static err_t c4gltegnss_process ( void );
/**
* @brief Check for errors.
* @details This function checks for different types of
* errors and logs them on UART or logs the response if no errors occured.
* @param[in] error_flag Error flag to check.
*/
static void c4gltegnss_error_check ( err_t error_flag );
/**
* @brief Response check.
* @details This function checks for response and
* returns the status of response.
* @param[in] rsp Expected response.
* @return @li @c 0 - OK response.
* @li @c -2 - Timeout error.
* @li @c -3 - Command error.
* @li @c -4 - Unknown error.
* See #err_t definition for detailed explanation.
*/
static err_t c4gltegnss_rsp_check ( uint8_t *rsp );
/**
* @brief Configure device for connection to the network.
* @details Sends commands to configure and enable
* connection to the specified network.
* @return @li @c 0 - OK response.
* @li @c -2 - Timeout error.
* @li @c -3 - Command error.
* @li @c -4 - Unknown error.
* See #err_t definition for detailed explanation.
*/
static err_t c4gltegnss_config_for_network ( void );
/**
* @brief Wait for connection signal.
* @details Wait for connection signal from CREG URC.
* @return @li @c 0 - OK response.
* @li @c -2 - Timeout error.
* @li @c -3 - Command error.
* @li @c -4 - Unknown error.
* See #err_t definition for detailed explanation.
*/
static err_t c4gltegnss_check_connection ( void );
/**
* @brief Configure device for example.
* @details Configure device for the specified example.
* @return @li @c 0 - OK response.
* @li @c -2 - Timeout error.
* @li @c -3 - Command error.
* @li @c -4 - Unknown error.
* See #err_t definition for detailed explanation.
*/
static err_t c4gltegnss_config_for_example ( void );
/**
* @brief Execute example.
* @details This function executes SMS, TCP/UDP or GNSS example depending on the DEMO_EXAMPLE macro.
* @return @li @c 0 - OK response.
* @li @c -2 - Timeout error.
* @li @c -3 - Command error.
* @li @c -4 - Unknown error.
* See #err_t definition for detailed explanation.
*/
static err_t c4gltegnss_example ( void );
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
c4gltegnss_cfg_t c4gltegnss_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
c4gltegnss_cfg_setup( &c4gltegnss_cfg );
C4GLTEGNSS_MAP_MIKROBUS( c4gltegnss_cfg, MIKROBUS_1 );
if ( UART_ERROR == c4gltegnss_init( &c4gltegnss, &c4gltegnss_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
// Power cycle device
c4gltegnss_set_power_state ( &c4gltegnss, C4GLTEGNSS_POWER_STATE_OFF );
c4gltegnss_set_power_state ( &c4gltegnss, C4GLTEGNSS_POWER_STATE_ON );
// Dummy write to activate AT commands interface
c4gltegnss_send_cmd( &c4gltegnss, C4GLTEGNSS_CMD_AT );
c4gltegnss_process( );
c4gltegnss_clear_app_buf( );
// Check communication
c4gltegnss_send_cmd( &c4gltegnss, C4GLTEGNSS_CMD_AT );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
c4gltegnss_error_check( error_flag );
log_info( &logger, " Application Task " );
example_state = C4GLTEGNSS_CONFIGURE_FOR_NETWORK;
}
void application_task ( void )
{
switch ( example_state )
{
case C4GLTEGNSS_CONFIGURE_FOR_NETWORK:
{
if ( C4GLTEGNSS_OK == c4gltegnss_config_for_network( ) )
{
example_state = C4GLTEGNSS_WAIT_FOR_CONNECTION;
}
break;
}
case C4GLTEGNSS_WAIT_FOR_CONNECTION:
{
if ( C4GLTEGNSS_OK == c4gltegnss_check_connection( ) )
{
example_state = C4GLTEGNSS_CONFIGURE_FOR_EXAMPLE;
}
break;
}
case C4GLTEGNSS_CONFIGURE_FOR_EXAMPLE:
{
if ( C4GLTEGNSS_OK == c4gltegnss_config_for_example( ) )
{
example_state = C4GLTEGNSS_EXAMPLE;
}
break;
}
case C4GLTEGNSS_EXAMPLE:
{
c4gltegnss_example( );
break;
}
default:
{
log_error( &logger, " Example state." );
break;
}
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
static void c4gltegnss_clear_app_buf ( void )
{
memset( app_buf, 0, app_buf_len );
app_buf_len = 0;
}
static void c4gltegnss_log_app_buf ( void )
{
for ( int32_t buf_cnt = 0; buf_cnt < app_buf_len; buf_cnt++ )
{
log_printf( &logger, "%c", app_buf[ buf_cnt ] );
}
}
static err_t c4gltegnss_process ( void )
{
uint8_t rx_buf[ PROCESS_BUFFER_SIZE ] = { 0 };
int32_t overflow_bytes = 0;
int32_t rx_cnt = 0;
int32_t rx_size = c4gltegnss_generic_read( &c4gltegnss, rx_buf, PROCESS_BUFFER_SIZE );
if ( ( rx_size > 0 ) && ( rx_size <= APP_BUFFER_SIZE ) )
{
if ( ( app_buf_len + rx_size ) > APP_BUFFER_SIZE )
{
overflow_bytes = ( app_buf_len + rx_size ) - APP_BUFFER_SIZE;
app_buf_len = APP_BUFFER_SIZE - rx_size;
memmove ( app_buf, &app_buf[ overflow_bytes ], app_buf_len );
memset ( &app_buf[ app_buf_len ], 0, overflow_bytes );
}
for ( rx_cnt = 0; rx_cnt < rx_size; rx_cnt++ )
{
if ( rx_buf[ rx_cnt ] )
{
app_buf[ app_buf_len++ ] = rx_buf[ rx_cnt ];
}
}
return C4GLTEGNSS_OK;
}
return C4GLTEGNSS_ERROR;
}
static err_t c4gltegnss_rsp_check ( uint8_t *rsp )
{
uint32_t timeout_cnt = 0;
uint32_t timeout = 120000;
c4gltegnss_clear_app_buf( );
c4gltegnss_process( );
while ( ( 0 == strstr( app_buf, rsp ) ) &&
( 0 == strstr( app_buf, C4GLTEGNSS_RSP_ERROR ) ) )
{
c4gltegnss_process( );
if ( timeout_cnt++ > timeout )
{
c4gltegnss_clear_app_buf( );
return C4GLTEGNSS_ERROR_TIMEOUT;
}
Delay_ms ( 1 );
}
Delay_ms ( 100 );
c4gltegnss_process( );
if ( strstr( app_buf, rsp ) )
{
return C4GLTEGNSS_OK;
}
else if ( strstr( app_buf, C4GLTEGNSS_RSP_ERROR ) )
{
return C4GLTEGNSS_ERROR_CMD;
}
else
{
return C4GLTEGNSS_ERROR_UNKNOWN;
}
}
static void c4gltegnss_error_check ( err_t error_flag )
{
switch ( error_flag )
{
case C4GLTEGNSS_OK:
{
c4gltegnss_log_app_buf( );
break;
}
case C4GLTEGNSS_ERROR:
{
log_error( &logger, " Overflow!" );
break;
}
case C4GLTEGNSS_ERROR_TIMEOUT:
{
log_error( &logger, " Timeout!" );
break;
}
case C4GLTEGNSS_ERROR_CMD:
{
log_error( &logger, " CMD!" );
break;
}
case C4GLTEGNSS_ERROR_UNKNOWN:
default:
{
log_error( &logger, " Unknown!" );
break;
}
}
Delay_ms ( 500 );
}
static err_t c4gltegnss_config_for_network ( void )
{
err_t func_error = C4GLTEGNSS_OK;
#if ( ( DEMO_EXAMPLE == EXAMPLE_TCP_UDP ) || ( DEMO_EXAMPLE == EXAMPLE_SMS ) )
// Set SIM APN
c4gltegnss_set_sim_apn( &c4gltegnss, SIM_APN );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
// Enable full functionality
#define FULL_FUNCTIONALITY "1"
c4gltegnss_send_cmd_with_par( &c4gltegnss, C4GLTEGNSS_CMD_CFUN, FULL_FUNCTIONALITY );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
// Enable network registartion
#define ENABLE_REG "2"
c4gltegnss_send_cmd_with_par( &c4gltegnss, C4GLTEGNSS_CMD_CREG, ENABLE_REG );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
// Automatic registration
#define AUTOMATIC_REGISTRATION "0"
c4gltegnss_send_cmd_with_par( &c4gltegnss, C4GLTEGNSS_CMD_COPS, AUTOMATIC_REGISTRATION );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
#endif
return func_error;
}
static err_t c4gltegnss_check_connection ( void )
{
#if ( ( DEMO_EXAMPLE == EXAMPLE_TCP_UDP ) || ( DEMO_EXAMPLE == EXAMPLE_SMS ) )
#define CONNECTED "+CREG: 1"
c4gltegnss_process( );
if ( strstr( app_buf, CONNECTED ) )
{
Delay_ms ( 100 );
c4gltegnss_process( );
c4gltegnss_log_app_buf( );
log_printf( &logger, "\r\n" );
c4gltegnss_clear_app_buf( );
// Check signal quality
c4gltegnss_send_cmd( &c4gltegnss, C4GLTEGNSS_CMD_CSQ );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
c4gltegnss_error_check( error_flag );
return error_flag;
}
return C4GLTEGNSS_ERROR;
#endif
return C4GLTEGNSS_OK;
}
static err_t c4gltegnss_config_for_example( void )
{
err_t func_error = C4GLTEGNSS_OK;
#if ( DEMO_EXAMPLE == EXAMPLE_TCP_UDP )
#define ACTIVATE_PDP_CONTEXT "1,1"
c4gltegnss_send_cmd_with_par( &c4gltegnss, C4GLTEGNSS_CMD_CGACT, ACTIVATE_PDP_CONTEXT );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
#elif ( DEMO_EXAMPLE == EXAMPLE_SMS )
c4gltegnss_send_cmd_with_par( &c4gltegnss, C4GLTEGNSS_CMD_CMGF, SMS_MODE );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
#elif ( DEMO_EXAMPLE == EXAMPLE_GNSS )
c4gltegnss_send_cmd_check( &c4gltegnss, C4GLTEGNSS_CMD_UGPS );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
#define GPS_POWERED_OFF "+UGPS: 0"
if ( strstr( app_buf, GPS_POWERED_OFF ) )
{
c4gltegnss_error_check( error_flag );
#define ENABLE_GPS "1,0,1"
c4gltegnss_send_cmd_with_par( &c4gltegnss, C4GLTEGNSS_CMD_UGPS, ENABLE_GPS );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
Delay_ms ( 1000 );
}
#define ENABLE_NMEA_GGA "1"
c4gltegnss_send_cmd_with_par( &c4gltegnss, C4GLTEGNSS_CMD_UGGGA, ENABLE_NMEA_GGA );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
#else
#error "No demo example selected"
#endif
return func_error;
}
static err_t c4gltegnss_example( void )
{
err_t func_error = C4GLTEGNSS_OK;
#if ( DEMO_EXAMPLE == EXAMPLE_TCP_UDP )
uint8_t cmd_buf[ 100 ] = { 0 };
uint8_t urc_buf[ 20 ] = { 0 };
uint16_t timeout_cnt = 0;
uint16_t timeout = 30000;
uint8_t * __generic_ptr socket_num_buf = 0;
uint8_t tcp_socket_num[ 2 ] = { 0 };
uint8_t udp_socket_num[ 2 ] = { 0 };
// Create TCP socket
#define RSP_USOCR "+USOCR:"
#define TCP_PROTOCOL "6"
c4gltegnss_send_cmd_with_par ( &c4gltegnss, C4GLTEGNSS_CMD_USOCR, TCP_PROTOCOL );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
socket_num_buf = strstr( app_buf, RSP_USOCR ) + strlen ( RSP_USOCR );
tcp_socket_num[ 0 ] = *socket_num_buf;
c4gltegnss_error_check( error_flag );
// Create UDP socket
#define UDP_PROTOCOL "17"
c4gltegnss_send_cmd_with_par ( &c4gltegnss, C4GLTEGNSS_CMD_USOCR, UDP_PROTOCOL );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
socket_num_buf = strstr( app_buf, RSP_USOCR ) + strlen ( RSP_USOCR );
udp_socket_num[ 0 ] = *socket_num_buf;
c4gltegnss_error_check( error_flag );
// Connect TCP socket to remote IP and port
strcpy( cmd_buf, tcp_socket_num );
strcat( cmd_buf, ",\"" );
strcat( cmd_buf, REMOTE_IP );
strcat( cmd_buf, "\"," );
strcat( cmd_buf, REMOTE_PORT );
c4gltegnss_send_cmd_with_par( &c4gltegnss, C4GLTEGNSS_CMD_USOCO, cmd_buf );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
// Connect UDP socket to remote IP and port
#define ASYNC_CONNECT "1"
strcpy( cmd_buf, udp_socket_num );
strcat( cmd_buf, ",\"" );
strcat( cmd_buf, REMOTE_IP );
strcat( cmd_buf, "\"," );
strcat( cmd_buf, REMOTE_PORT );
strcat( cmd_buf, "," );
strcat( cmd_buf, ASYNC_CONNECT );
c4gltegnss_send_cmd_with_par ( &c4gltegnss, C4GLTEGNSS_CMD_USOCO, cmd_buf );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
// Get message length
uint8_t message_len_buf[ 5 ] = { 0 };
uint16_t message_len = strlen( MESSAGE_CONTENT );
uint16_to_str( message_len, message_len_buf );
l_trim( message_len_buf );
r_trim( message_len_buf );
// Write message to TCP socket
strcpy( cmd_buf, tcp_socket_num );
strcat( cmd_buf, "," );
strcat( cmd_buf, message_len_buf );
strcat( cmd_buf, ",\"" );
strcat( cmd_buf, MESSAGE_CONTENT );
strcat( cmd_buf, "\"" );
c4gltegnss_send_cmd_with_par ( &c4gltegnss, C4GLTEGNSS_CMD_USOWR, cmd_buf );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
// Read response message from TCP socket
#define URC_READ_SOCKET_DATA_TCP "+UUSORD:"
strcpy( urc_buf, URC_READ_SOCKET_DATA_TCP );
strcat( urc_buf, tcp_socket_num );
for ( ; ; )
{
c4gltegnss_process( );
uint8_t * __generic_ptr start_response_buf = strstr( app_buf, urc_buf );
if ( start_response_buf )
{
Delay_ms ( 100 );
c4gltegnss_process( );
uint8_t response_len_buf[ 5 ] = { 0 };
uint8_t * __generic_ptr start_response_len = strstr( start_response_buf, "," ) + 1;
memcpy ( response_len_buf, start_response_len, app_buf_len - ( start_response_len - app_buf ) );
strcpy( cmd_buf, tcp_socket_num );
strcat( cmd_buf, "," );
strcat( cmd_buf, response_len_buf );
c4gltegnss_log_app_buf( );
c4gltegnss_clear_app_buf( );
c4gltegnss_send_cmd_with_par ( &c4gltegnss, C4GLTEGNSS_CMD_USORD, cmd_buf );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
break;
}
if ( timeout_cnt++ > timeout )
{
break;
}
Delay_ms ( 1 );
}
timeout_cnt = 0;
// Write message to UDP socket
strcpy( cmd_buf, udp_socket_num );
strcat( cmd_buf, "," );
strcat( cmd_buf, message_len_buf );
strcat( cmd_buf, ",\"" );
strcat( cmd_buf, MESSAGE_CONTENT );
strcat( cmd_buf, "\"" );
c4gltegnss_send_cmd_with_par( &c4gltegnss, C4GLTEGNSS_CMD_USOWR, cmd_buf );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
// Read response message from UDP socket
#define URC_READ_SOCKET_DATA_UDP "+UUSORF:"
strcpy( urc_buf, URC_READ_SOCKET_DATA_UDP );
strcat( urc_buf, udp_socket_num );
for ( ; ; )
{
c4gltegnss_process( );
uint8_t * __generic_ptr start_response_buf = strstr( app_buf, urc_buf );
if ( start_response_buf )
{
Delay_ms ( 100 );
c4gltegnss_process( );
uint8_t response_len_buf[ 5 ] = { 0 };
uint8_t * __generic_ptr start_response_len = strstr( start_response_buf, "," ) + 1;
memcpy ( response_len_buf, start_response_len, app_buf_len - ( start_response_len - app_buf ) );
strcpy( cmd_buf, udp_socket_num );
strcat( cmd_buf, "," );
strcat( cmd_buf, response_len_buf );
c4gltegnss_log_app_buf( );
c4gltegnss_clear_app_buf( );
c4gltegnss_send_cmd_with_par ( &c4gltegnss, C4GLTEGNSS_CMD_USORF, cmd_buf );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
break;
}
if ( timeout_cnt++ > timeout )
{
break;
}
Delay_ms ( 1 );
}
// Close TCP socket
c4gltegnss_send_cmd_with_par ( &c4gltegnss, C4GLTEGNSS_CMD_USOCL, tcp_socket_num );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
// Close UDP socket
c4gltegnss_send_cmd_with_par ( &c4gltegnss, C4GLTEGNSS_CMD_USOCL, udp_socket_num );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
#elif ( DEMO_EXAMPLE == EXAMPLE_SMS )
// Check SMS mode
#define CMGF_PDU "+CMGF: 0"
#define CMGF_TXT "+CMGF: 1"
c4gltegnss_send_cmd_check( &c4gltegnss, C4GLTEGNSS_CMD_CMGF );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
if ( strstr( app_buf, CMGF_PDU ) )
{
// Send SMS in PDU mode
c4gltegnss_send_sms_pdu( &c4gltegnss, SIM_SMSC, PHONE_NUMBER_TO_MESSAGE, MESSAGE_CONTENT );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
}
else if ( strstr( app_buf, CMGF_TXT ) )
{
// Send SMS in TXT mode
c4gltegnss_send_sms_text ( &c4gltegnss, PHONE_NUMBER_TO_MESSAGE, MESSAGE_CONTENT );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
c4gltegnss_error_check( error_flag );
}
// 30 seconds delay
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
#elif ( DEMO_EXAMPLE == EXAMPLE_GNSS )
c4gltegnss_send_cmd_check( &c4gltegnss, C4GLTEGNSS_CMD_UGGGA );
error_flag = c4gltegnss_rsp_check( C4GLTEGNSS_RSP_OK );
func_error |= error_flag;
if ( app_buf_len > ( sizeof ( C4GLTEGNSS_RSP_GGA ) + C4GLTEGNSS_GGA_ELEMENT_SIZE ) )
{
uint8_t element_buf[ 100 ] = { 0 };
if ( C4GLTEGNSS_OK == c4gltegnss_parse_gga( app_buf, C4GLTEGNSS_GGA_LATITUDE, element_buf ) )
{
static uint8_t wait_for_fix_cnt = 0;
if ( strlen( element_buf ) > 0 )
{
log_printf( &logger, "\r\n Latitude: %.2s degrees, %s minutes \r\n", element_buf, &element_buf[ 2 ] );
c4gltegnss_parse_gga( app_buf, C4GLTEGNSS_GGA_LONGITUDE, element_buf );
log_printf( &logger, " Longitude: %.3s degrees, %s minutes \r\n", element_buf, &element_buf[ 3 ] );
memset( element_buf, 0, sizeof( element_buf ) );
c4gltegnss_parse_gga( app_buf, C4GLTEGNSS_GGA_ALTITUDE, element_buf );
log_printf( &logger, " Altitude: %s m \r\n", element_buf );
wait_for_fix_cnt = 0;
}
else
{
if ( wait_for_fix_cnt % 5 == 0 )
{
log_printf( &logger, " Waiting for the position fix...\r\n\n" );
wait_for_fix_cnt = 0;
}
wait_for_fix_cnt++;
}
c4gltegnss_clear_app_buf( );
}
}
Delay_ms ( 1000 );
#else
#error "No demo example selected"
#endif
return func_error;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:GSM/LTE