Make hands-free control with VC-02 and PIC32MZ1024EFF144
Control your device using speech

Published Feb 27, 2023
Click board™
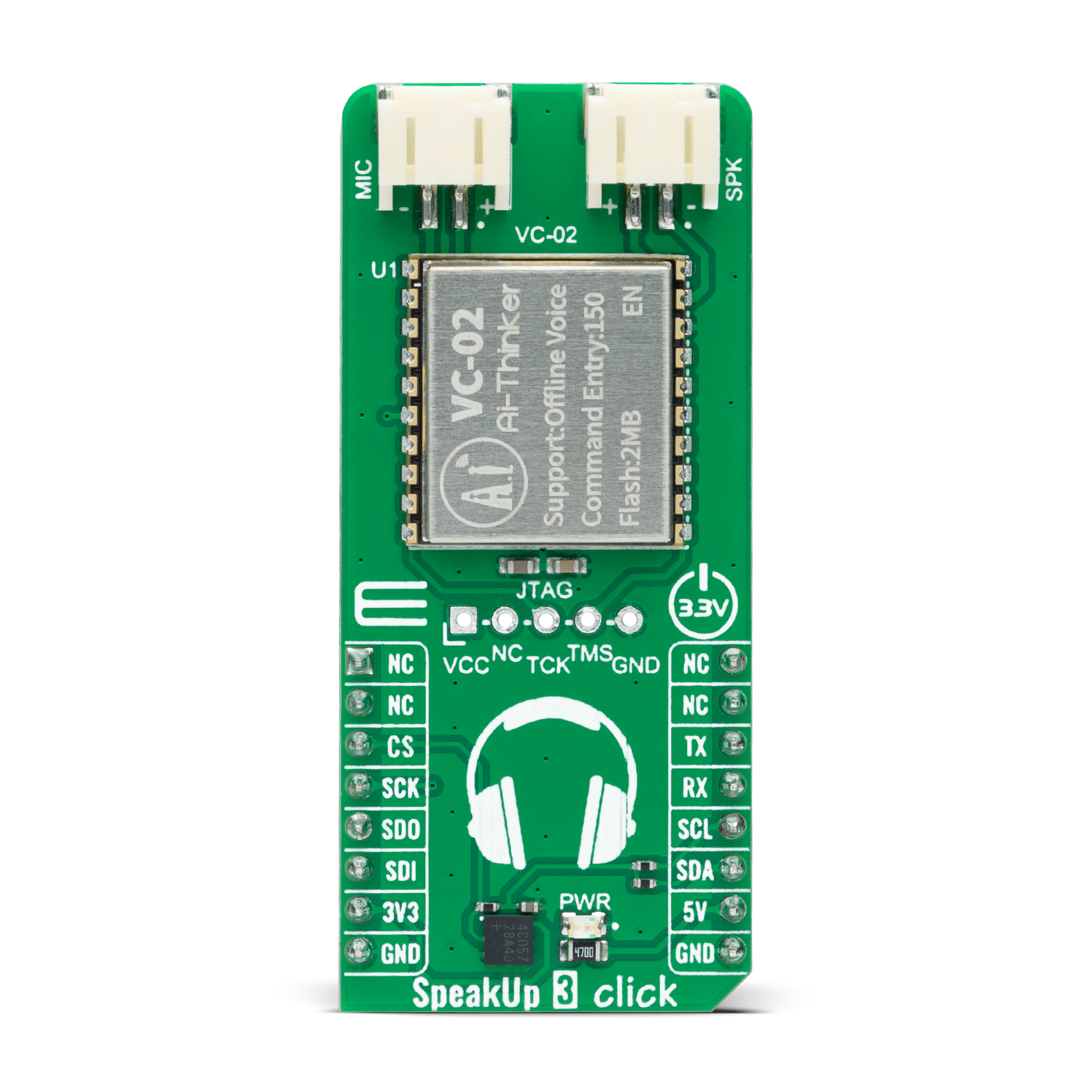
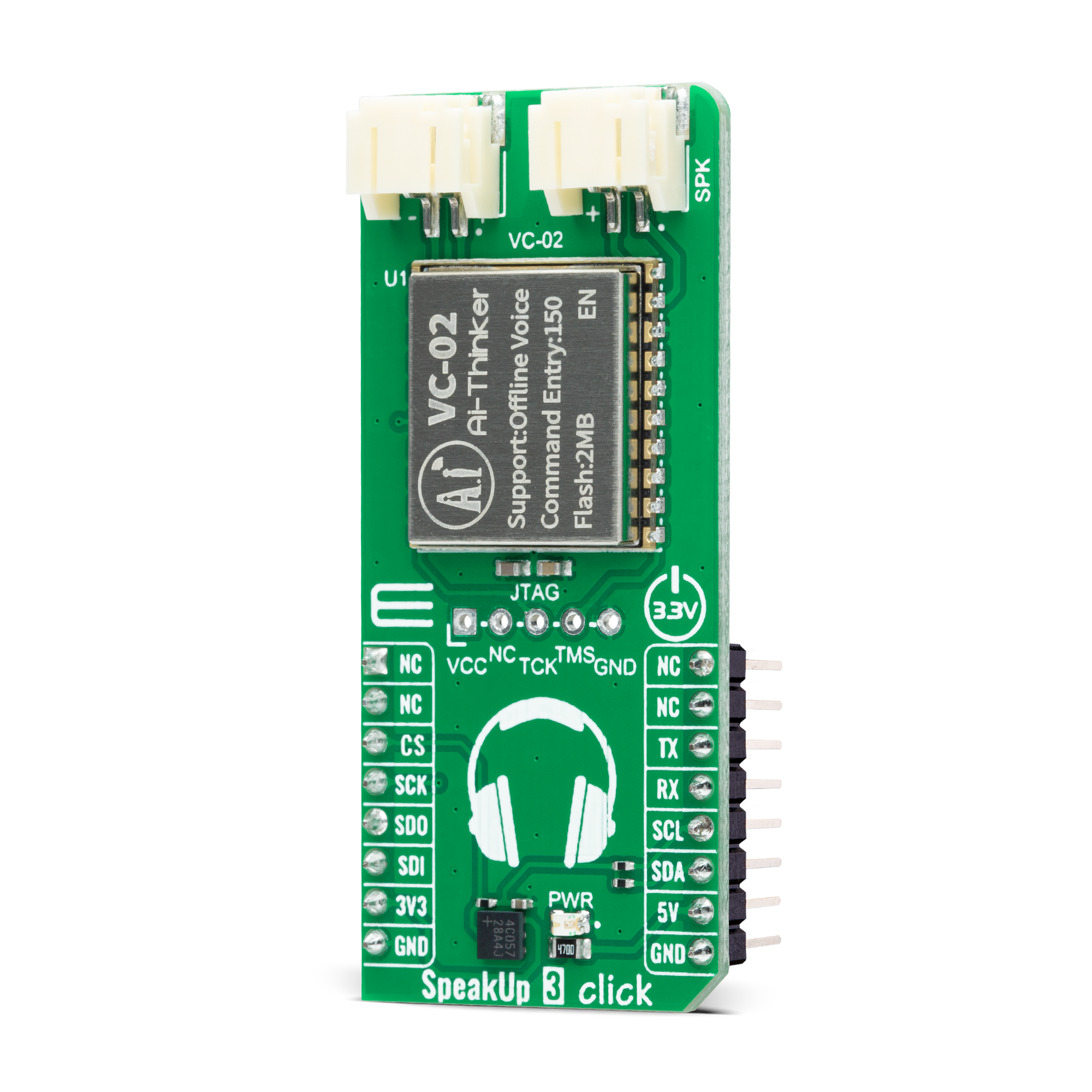
SpeakUp 3 Click
Dev. board
Fusion for PIC32 v8
Compiler
NECTO Studio
MCU
PIC32MZ1024EFF144
Pure offline speech recognition solution
A
A
Hardware Overview
How does it work?
SpeakUp 3 Click is based on the VC-02, an offline voice recognition AI module from Ai-Thinker Technology, characterized by high reliability and robust versatility. The VC-02 module uses an integrated voice chip US516P6 from Unisound, which continuously optimizes and innovates algorithms in speech recognition technology. The offline recognition algorithm is deeply integrated with the chip architecture, providing customers with an ultra-low-cost offline voice recognition solution. This board can be widely and quickly applied to all smart small household appliances and products requiring voice control. The US516P6 chip uses a 32-bit RSIC architecture core, running at 240MHz, and incorporates a DSP instruction explicitly set for signal processing and speech recognition, an FPU arithmetic unit that supports floating-point operations, and an FFT accelerator (support 1024-point complex FFT/IFFT operations, or 2048-point real FFT/IFFT operations). What makes this module unique are features like
offline identification of 150 local instructions and self-learning of wake-up words, RTOS lightweight system, 90% recognition rate in a far field distance from 1 up to 5m, firmware update feature, as well as the selection of the communication method with the module. This Click board™ comes with a configurable host interface allowing communication with MCU using the chosen interface. The VC-02 can communicate with MCU using the UART interface, a default communication interface with commonly used UART RX and TX pins, and a default baud rate of 115200bps. Users can also use other interfaces, such as SPI and I2C, to configure the module and write the library by themselves. At the center of the SpeakUp 3 Click, an additional unpopulated header offers full support for debugging and programming capabilities. The Ai-Thinker has provided its users with a VC series development page. With a simple registration, they can create
their own command list/SDK/firmware for this module quickly and easily for free. With this header, the user can use a JTAG interface, in addition to the UART interface, for programming and debugging available through the JTAG interface pins (TCK and TMS). For more information and help when creating custom firmware, you can contact their help center. A special addition to this Click board™ are connectors, marked as MIC and SPK, for an analog omnidirectional microphone and 8Ω 2W cavity speaker from Shenzhen Anxinke Technology. These parts can be found in the same package as the Click board or can be acquired as a solo version in our shop. This Click board™ can only be operated with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. However, the Click board™ comes equipped with a library containing functions and an example code that can be used as a reference for further development.

Features overview
Development board
Fusion for PIC32 v8 is a development board specially designed for the needs of rapid development of embedded applications. It supports a wide range of Microchip's PIC32 microcontrollers regardless of their number of pins and a broad set of unique functions, such as the first-ever embedded debugger/programmer over WiFi. The development board is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, connectors, and others, in one place. Thanks to innovative manufacturing technology, Fusion for PIC32 v8 provides a fluid and immersive working experience, allowing access anywhere and under any circumstances at any time. Each part of the
Fusion for PIC32 v8 development board contains the components necessary for the most efficient operation of the same board. In addition to the advanced integrated CODEGRIP programmer/debugger module, which offers many valuable programming/debugging options and seamless integration with the Mikroe software environment, the board also includes a clean and regulated power supply module for the development board. It can use a wide range of external power sources, including a battery, an external 12V power supply, and a power source via the USB Type-C (USB-C) connector. Communication options such as USB-UART, USB HOST/DEVICE, CAN (on the MCU card, if
supported), and Ethernet is also included. In addition, it also has the well-established mikroBUS™ standard, a standardized socket for the MCU card (SiBRAIN standard), and two display options for the TFT board line of products and character-based LCD. Fusion for PIC32 v8 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Type
8th Generation
Architecture
PIC32
MCU Memory (KB)
1024
Silicon Vendor
Microchip
Pin count
144
RAM (Bytes)
262144
You complete me!
Accessories
Microphone with PH2.0 female connector is an analog-type omnidirectional electret microphone, an electrostatic capacitor-based microphone, and is available with a lead terminated in a PH2.0 female connector. This microphone eliminates the need for a polarizing power supply by using permanently-charged material. With operating frequencies ranging from 100 to 20.000Hz, the microphone features sensitivity ratings as low as -40dB (±3) and signal-to-noise ratios from 57 to 70dBA (typical 60dBA). Housed in a compact package with diameters as small as 6mm, this omnidirectional microphone is ideally suited for various high-quality recordings in industrial and outdoor applications where moisture and environmental contaminants are present.

Speaker with PH2.0 female connector is an 8Ω 2W portable all-in-one passive cavity speaker available in wire-lead mount configuration with a PH2.0 female connector with an operating frequency of 100kHz. This speaker is characterized by a long service life based on excellent build-material and technology, which enhance its service life, making it convenient and reliable. It is also built on strict quality control standards (design improved for more durability) with a low distortion rate, keeping the sound stable (clear sound quality providing superb music reproductions). Housed in a compact package with dimensions of 40×20×5.8mm (LxWxH), this cavity loudspeaker offers stable performance ideally suited for various audio-producing applications in consumer, medical, security, and many more.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
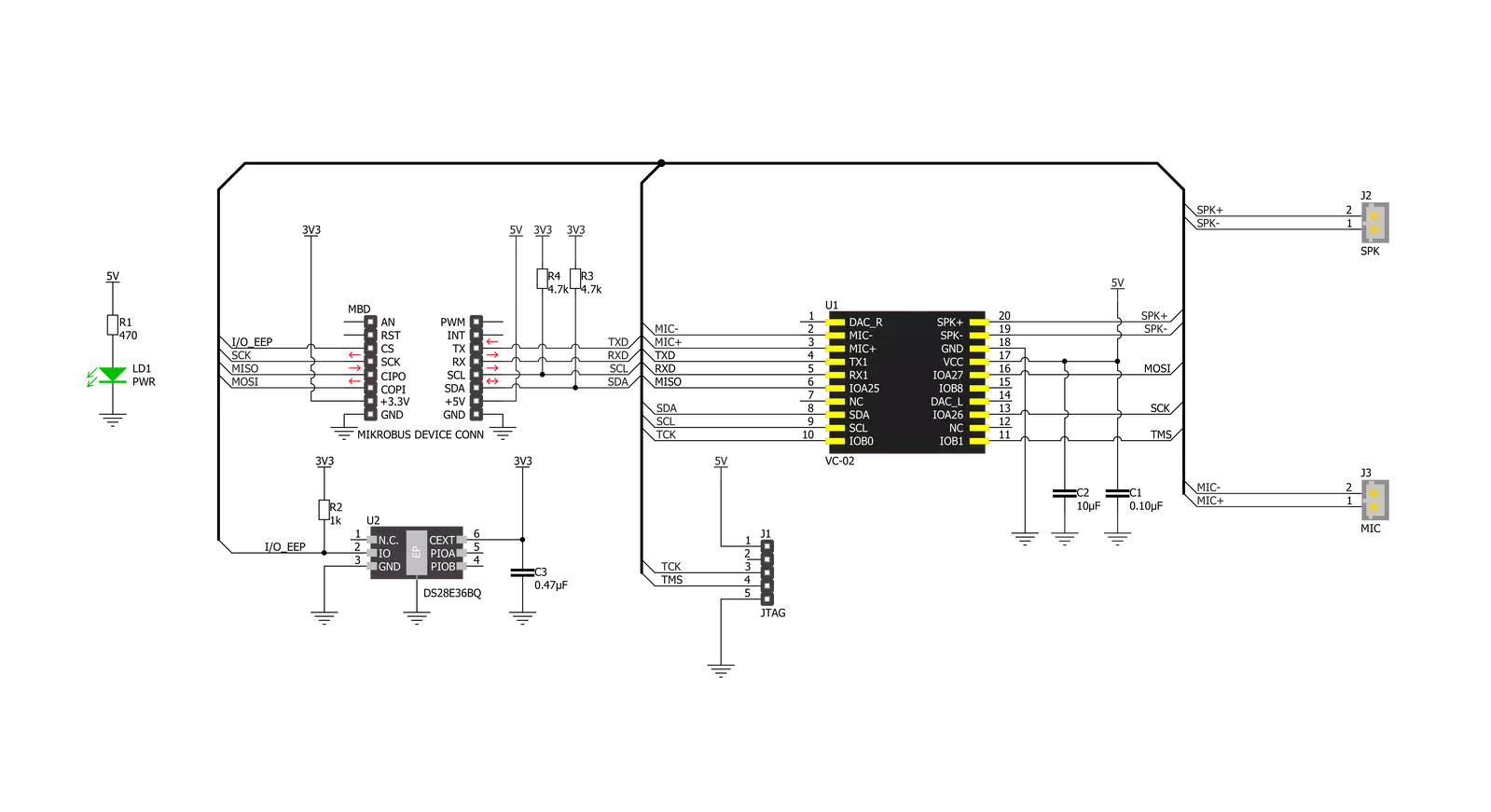
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Fusion for PIC32 v8 as your development board.















Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for SpeakUp 3 Click driver.
Key functions:
speakup3_generic_readThis function reads a desired number of data bytes by using UART serial interface.speakup3_wait_for_replyThis function waits up to @b wait_ms for a reply to the voice command.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief SpeakUp 3 Click Example.
*
* # Description
* This example demonstrates the use of the SpeakUp 3 Click board by reading
* and displaying the voice commands reply messages.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes driver and logger.
*
* ## Application Task
* Waits for the reply message to a voice command and displays it on the USB UART.
*
* ## Additional Function
* - static void speakup3_display_reply ( void )
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "speakup3.h"
static speakup3_t speakup3;
static log_t logger;
/**
* @brief SpeakUp 3 display reply function.
* @details This function displays on the USB UART the reply message for the selected
* reply instruction code.
* @param[in] reply_ins : Reply instruction code.
* @return None.
* @note None.
*/
static void speakup3_display_reply ( uint8_t reply_ins );
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
speakup3_cfg_t speakup3_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
speakup3_cfg_setup( &speakup3_cfg );
SPEAKUP3_MAP_MIKROBUS( speakup3_cfg, MIKROBUS_1 );
if ( UART_ERROR == speakup3_init( &speakup3, &speakup3_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
uint8_t reply_ins;
if ( SPEAKUP3_OK == speakup3_wait_for_reply ( &speakup3, &reply_ins, 1000 ) )
{
speakup3_display_reply ( reply_ins );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
static void speakup3_display_reply ( uint8_t reply_ins )
{
log_printf( &logger, " Reply: " );
switch ( reply_ins )
{
case SPEAKUP3_INS_ENTER_WAKE_UP:
{
log_printf( &logger, "Hi, how can I help? / Hi, what's up? / Yes, I'm here.\r\n" );
break;
}
case SPEAKUP3_INS_EXIT_WAKE_UP:
{
log_printf( &logger, "See you later.\r\n" );
break;
}
case SPEAKUP3_INS_LEARN_MATCH_AC:
{
log_printf( &logger, "OK, match the air conditioner.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TURN_ON:
{
log_printf( &logger, "OK, turn on the air conditioner.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TURN_OFF:
{
log_printf( &logger, "OK, turn off the air conditioner.\r\n" );
break;
}
case SPEAKUP3_INS_AC_MODE_AUTO:
{
log_printf( &logger, "OK, automatic mode.\r\n" );
break;
}
case SPEAKUP3_INS_AC_MODE_COLD:
{
log_printf( &logger, "OK, cold mode.\r\n" );
break;
}
case SPEAKUP3_INS_AC_MODE_HEAT:
{
log_printf( &logger, "OK, heat mode.\r\n" );
break;
}
case SPEAKUP3_INS_AC_MODE_DRY:
{
log_printf( &logger, "OK, dry mode.\r\n" );
break;
}
case SPEAKUP3_INS_AC_MODE_FAN:
{
log_printf( &logger, "OK, fan mode.\r\n" );
break;
}
case SPEAKUP3_INS_AC_MODE_SLEEP:
{
log_printf( &logger, "OK, sleeping mode.\r\n" );
break;
}
case SPEAKUP3_INS_AC_WIND_AUTO:
{
log_printf( &logger, "OK, automatic fan.\r\n" );
break;
}
case SPEAKUP3_INS_AC_WIND_LOW:
{
log_printf( &logger, "OK, low fan.\r\n" );
break;
}
case SPEAKUP3_INS_AC_WIND_MID:
{
log_printf( &logger, "OK, medium fan.\r\n" );
break;
}
case SPEAKUP3_INS_AC_WIND_HIGH:
{
log_printf( &logger, "OK, high fan.\r\n" );
break;
}
case SPEAKUP3_INS_AC_WIND_INC:
{
log_printf( &logger, "OK, higher the fan.\r\n" );
break;
}
case SPEAKUP3_INS_AC_WIND_DEC:
{
log_printf( &logger, "OK, lower the fan.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_16:
{
log_printf( &logger, "OK, sixteen centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_17:
{
log_printf( &logger, "OK, seventeen centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_18:
{
log_printf( &logger, "OK, eighteen centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_19:
{
log_printf( &logger, "OK, nineteen centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_20:
{
log_printf( &logger, "OK, twenty centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_21:
{
log_printf( &logger, "OK, twenty one centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_22:
{
log_printf( &logger, "OK, twenty two centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_23:
{
log_printf( &logger, "OK, twenty three centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_24:
{
log_printf( &logger, "OK, twenty four centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_25:
{
log_printf( &logger, "OK, twenty five centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_26:
{
log_printf( &logger, "OK, twenty six centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_27:
{
log_printf( &logger, "OK, twenty seven centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_28:
{
log_printf( &logger, "OK, twenty eight centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_29:
{
log_printf( &logger, "OK, twenty nine centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_30:
{
log_printf( &logger, "OK, thirty centigrade.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_INC:
{
log_printf( &logger, "OK, warmer.\r\n" );
break;
}
case SPEAKUP3_INS_AC_TMP_DEC:
{
log_printf( &logger, "OK, cooler.\r\n" );
break;
}
case SPEAKUP3_INS_AC_SWEPT_ON:
{
log_printf( &logger, "OK, start to fan.\r\n" );
break;
}
case SPEAKUP3_INS_AC_SWEPT_OFF:
{
log_printf( &logger, "OK, stop to fan.\r\n" );
break;
}
case SPEAKUP3_INS_AC_SWEPT_VERT:
{
log_printf( &logger, "OK, air swing up and down.\r\n" );
break;
}
case SPEAKUP3_INS_AC_SWEPT_CROSS:
{
log_printf( &logger, "OK, air swing left and right.\r\n" );
break;
}
case SPEAKUP3_INS_SET_RESTORE:
{
log_printf( &logger, "OK, air conditioner reset.\r\n" );
break;
}
default:
{
log_printf( &logger, "Unknown.\r\n" );
break;
}
}
}
// ------------------------------------------------------------------------ END