通过使用WS2812B-2020、EC12D1564402和STM32L496AG创建互动控制、视觉效果和精确位置显示
通过用户友好的旋钮界面传达精确的位置读数

已发布 7月 22, 2025
点击板
Rotary RGB Click
开发板
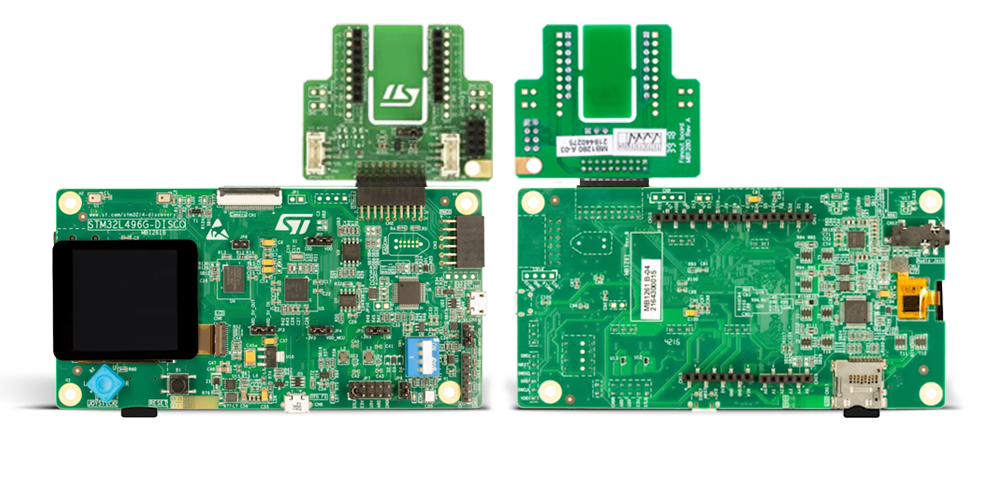
Discovery kit with STM32L496AG MCU
编译器
NECTO Studio
微控制器单元
STM32L496AG
适用于需要触觉和视觉反馈的应用,显示编码器设置的位置或水平,如音量控制、位置传感和用户界面控制。
A
A
硬件概览
它是如何工作的?
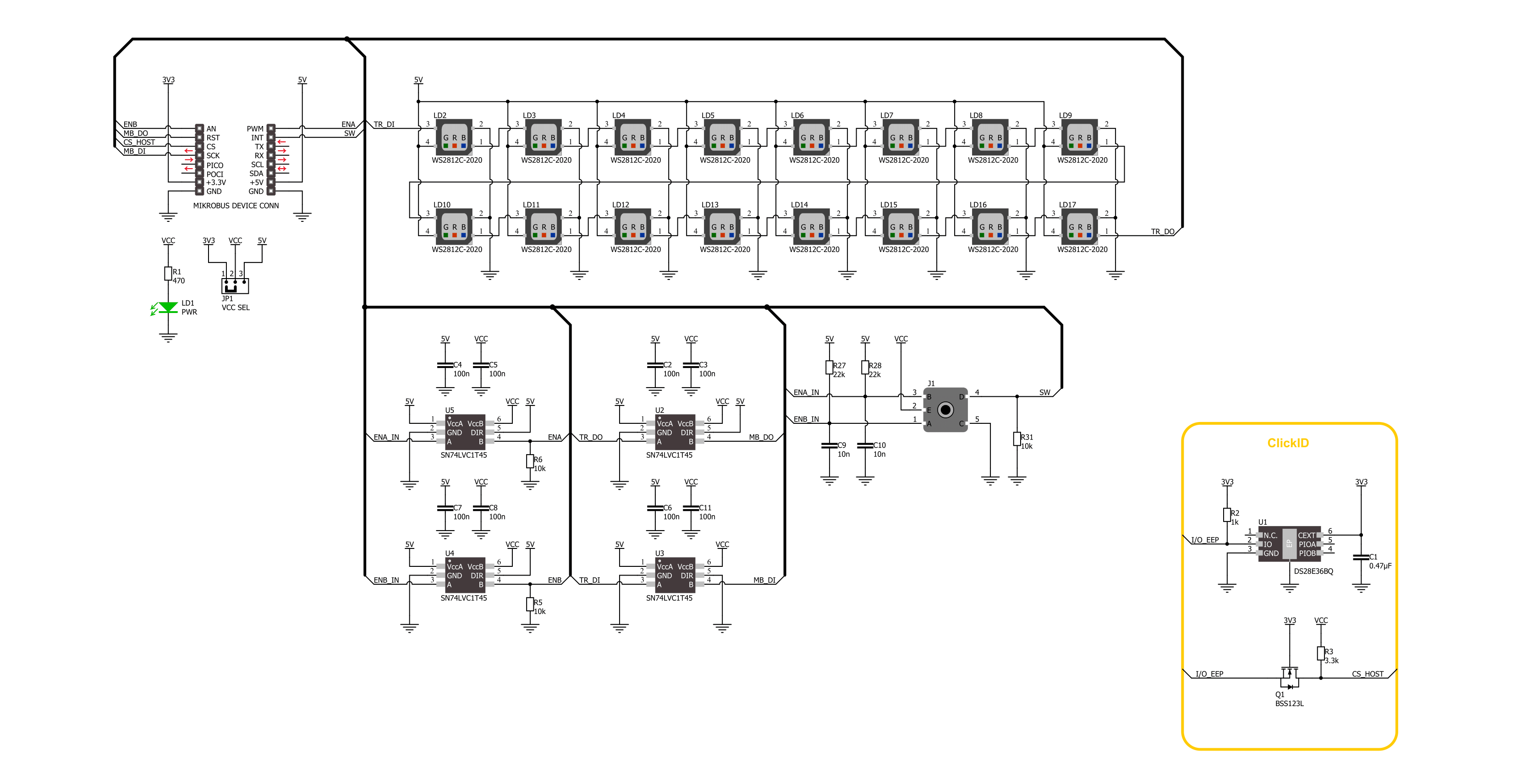
Rotary RGB Click基于由16个单独的RGB LED组成的LED环,这些LED来自Worldsemi的WS2812B-2020,以及高质量的ALPS旋转编码器EC12D1564402,可视化地表示编码器位置和更多功能。WS2812B-2020的内部配置包括智能数字端口数据锁存器和信号重塑放大驱动电路。它还包含一个精密的内部振荡器和一个电压可编程恒流控制部分,确保像素点光颜色高度一致。WS2812B-2020是一种具有低驱动电压(使用来自mikroBUS™电源轨的5V作为主要电源)、环保节能、高亮度、大散射角、良好一致性、低功耗、长寿命等优点的LED。此Click板™是开发各种有趣视觉效果的完美解决方案,适用
于任何应用,如灵活的位置、值指示器等。数据传输协议通过mikroBUS™插座的DO和DI引脚使用单一的NZR通信模式。在像素上电复位序列之后,WS2812B-2020的DI端口从主控制器接收数据;第一个像素收集初始24位数据,然后将其发送到内部数据锁存器,其他由内部信号重塑放大电路重塑的数据通过DO端口发送到下一个级联像素。在每个像素的传输之后,信号减少到24位。像素采用自动重塑传输技术,使像素级联数量不受信号传输的限制,只取决于信号传输的速度。EC12D1564402是一个15脉冲增量旋转编码器,带有一个按钮。该编码器具有独特的机械规格(其内部开关的去抖时间下降到2ms),并
且可以承受高达30,000次的开关循环。支持的去抖电路允许在触发输出之前让接触点稳定。旋转编码器时,它在两个mikroBUS™线上(ENA和ENB引脚)输出A和B信号(相互之间不同相位),并通过mikroBUS™插座的SW引脚输出按钮接触信号。四个德州仪器的SN74LVC1T45单比特总线收发器用于编码器和数据传输协议信号的逻辑电平转换。此Click板™可以通过VCC SEL跳线选择3.3V或5V逻辑电压电平运行。这样,既支持3.3V又支持5V的MCU可以正确使用通信线路。此外,此Click板™配备了一个包含易于使用的功能和示例代码的库,可用作进一步开发的参考。

功能概述
开发板
32L496GDISCOVERY Discovery 套件是一款功能全面的演示和开发平台,专为搭载 Arm® Cortex®-M4 内核的 STM32L496AG 微控制器设计。该套件适用于需要在高性能、先进图形处理和超低功耗之间取得平衡的应用,支持无缝原型开发,适用于各种嵌入式解决方案。STM32L496AG 采用创新的节能架构,集成
了扩展 RAM 和 Chrom-ART 图形加速器,在提升图形性能的同时保持低功耗,使其特别适用于音频处理、图形用户界面和实时数据采集等对能效要求较高的应用。为了简化开发流程,该开发板配备了板载 ST-LINK/V2-1 调试器/编程器,提供即插即用的调试和编程体验,使用户无需额外硬件即可轻松加载、调
试和测试应用程序。凭借低功耗特性、增强的内存能力以及内置调试工具,32L496GDISCOVERY 套件是开发先进嵌入式系统、实现高效能解决方案的理想选择。
微控制器概述
MCU卡片 / MCU

建筑
ARM Cortex-M4
MCU 内存 (KB)
1024
硅供应商
STMicroelectronics
引脚数
169
RAM (字节)
327680
使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
Click board™ 原理图
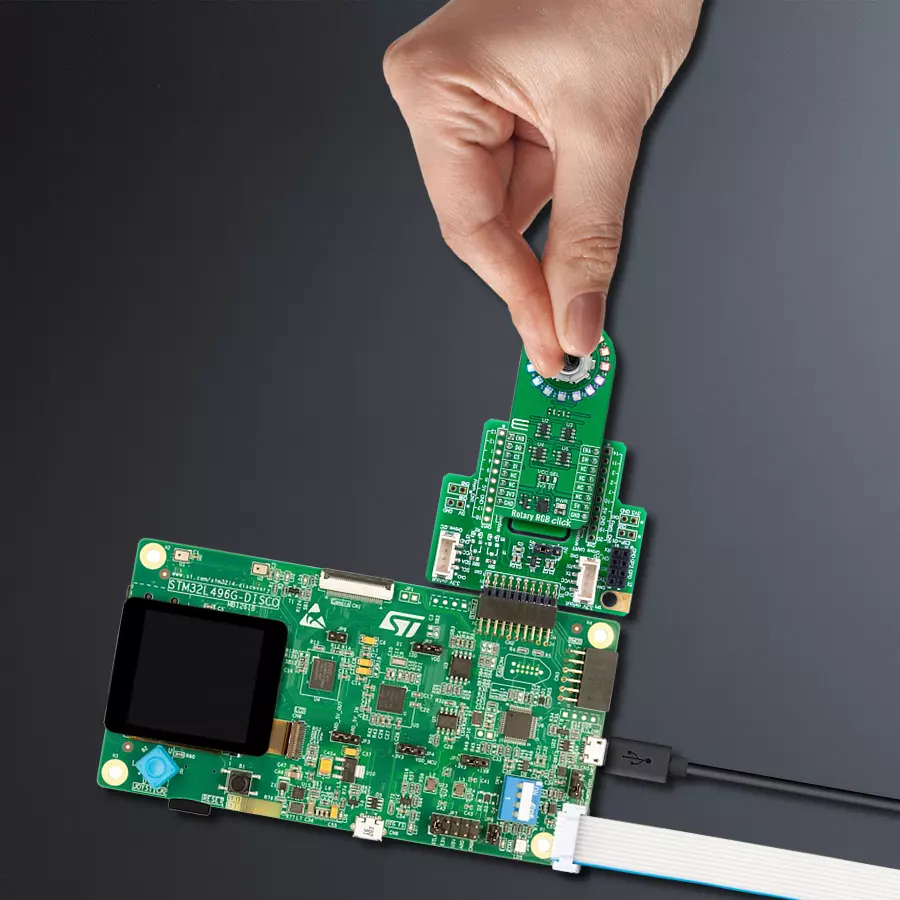
一步一步来
项目组装
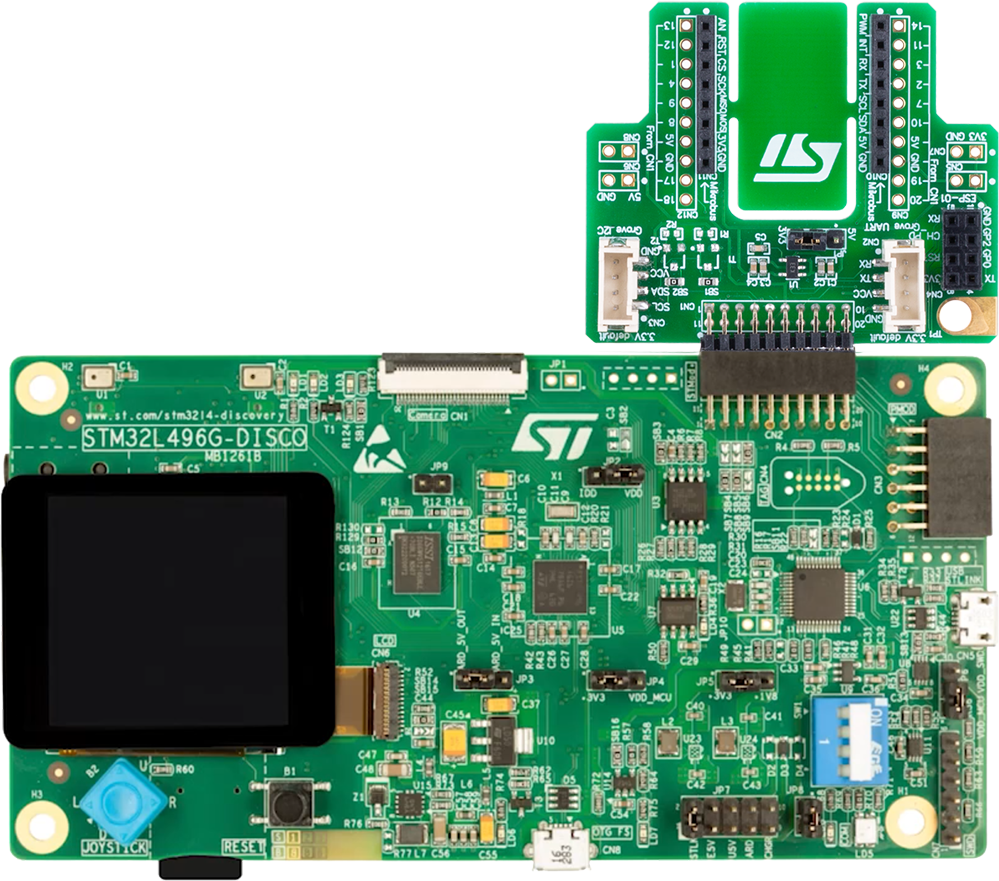
从选择您的开发板和Click板™开始。以Discovery kit with STM32L496AG MCU作为您的开发板开始。











软件支持
库描述
该库包含 Rotary RGB Click 驱动程序的 API。
关键功能:
rotaryrgb_set_led_pos_color- 此函数为选定的LED位置设置所需的颜色。rotaryrgb_set_all_leds_data- 此函数使用GPIO协议写入16个元素的数据数组以控制所有LED。rotaryrgb_get_state_switch- 此函数返回旋转编码器开关信号,即SW(INT)引脚的状态。
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* @file main.c
* @brief Rotary RGB Click Example.
*
* # Description
* This library contains the API for the Rotary RGB Click driver
* to control LEDs states and a rotary encoder position readings.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization of GPIO module and log UART.
* After the driver init, the app turn off all LEDs.
*
* ## Application Task
* This example demonstrates the use of the Rotary RGB Click board.
* The demo example shows the functionality of a rotary encoder used to control RGB LEDs.
* The switch controls the application of the colors,
* and the encoder mechanism controls the state of the LEDs.
*
* ## Additional Function
* - static void rotaryrgb_logic_zero ( void )
* - static void rotaryrgb_logic_one ( void )
* - static void rotaryrgb_switch_detection ( void )
* - static void rotaryrgb_encoder_mechanism ( void )
*
* @note
* Make sure the logic delays are defined for your system in the rotaryrgb_delays.h file.
*
* @author Nenad Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "rotaryrgb.h"
#include "rotaryrgb_delays.h"
static rotaryrgb_t rotaryrgb; /**< Rotary RGB Click driver object. */
static log_t logger; /**< Logger object. */
static uint8_t start_rot_status = 0;
static uint8_t led_color_sel = 0;
static uint8_t old_state = 0;
static uint8_t new_state = 1;
static uint8_t old_rot_state = 0;
static uint8_t new_rot_state = 1;
static uint16_t led_pos = 1;
static uint32_t demo_color_table[ 8 ] =
{
ROTARYRGB_COLOR_WHITE_50,
ROTARYRGB_COLOR_RED_50,
ROTARYRGB_COLOR_GREEN_50,
ROTARYRGB_COLOR_BLUE_50,
ROTARYRGB_COLOR_LIGHT_BLUE_50,
ROTARYRGB_COLOR_YELLOW_50,
ROTARYRGB_COLOR_PURPLE_50,
ROTARYRGB_COLOR_OFF
};
/**
* @brief Rotary RGB logic zero function.
* @details This function generates a logic zero sequence char
* to control the LED light source.
* @return Nothing.
*/
static void rotaryrgb_logic_zero ( void );
/**
* @brief Rotary RGB logic one function.
* @details This function generates a logic one sequence char
* to control the LED light source.
* @return Nothing.
*/
static void rotaryrgb_logic_one ( void );
/**
* @brief Rotary RGB switch detection function.
* @details This function is used for the switch state detection.
* @return Nothing.
*/
static void rotaryrgb_switch_detection ( void );
/**
* @brief Rotary RGB encoder mechanism function.
* @details This function is used to control the state of the LEDs
* by detecting the rotation direction of the rotary encoder.
* @return Nothing.
*/
static void rotaryrgb_encoder_mechanism ( void );
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
rotaryrgb_cfg_t rotaryrgb_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
rotaryrgb_cfg_setup( &rotaryrgb_cfg, &rotaryrgb_logic_zero, &rotaryrgb_logic_one );
ROTARYRGB_MAP_MIKROBUS( rotaryrgb_cfg, MIKROBUS_1 );
if ( DIGITAL_OUT_UNSUPPORTED_PIN == rotaryrgb_init( &rotaryrgb, &rotaryrgb_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
rotaryrgb_set_all_led_color( &rotaryrgb, ROTARYRGB_COLOR_OFF );
Delay_ms ( 100 );
log_info( &logger, " Application Task " );
Delay_ms ( 100 );
}
void application_task ( void )
{
rotaryrgb_set_led_pos_color( &rotaryrgb, led_pos % 17, demo_color_table[ led_color_sel ] );
rotaryrgb_switch_detection( );
rotaryrgb_encoder_mechanism( );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
static void rotaryrgb_logic_zero ( void )
{
hal_ll_gpio_set_pin_output( &rotaryrgb.di_pin.pin );
DELAY_TOH;
hal_ll_gpio_clear_pin_output( &rotaryrgb.di_pin.pin );
DELAY_TOL;
}
static void rotaryrgb_logic_one ( void )
{
hal_ll_gpio_set_pin_output( &rotaryrgb.di_pin.pin );
DELAY_T1H;
hal_ll_gpio_clear_pin_output( &rotaryrgb.di_pin.pin );
DELAY_T1L;
}
static void rotaryrgb_switch_detection ( void )
{
if ( rotaryrgb_get_state_switch( &rotaryrgb ) )
{
new_state = 1;
if ( ( 1 == new_state ) && ( 0 == old_state ) )
{
old_state = 1;
led_color_sel++;
if ( 7 < led_color_sel )
{
led_color_sel = 0;
}
}
}
else
{
old_state = 0;
}
}
static void rotaryrgb_encoder_mechanism ( void )
{
if ( rotaryrgb_get_state_enb( &rotaryrgb ) == rotaryrgb_get_state_ena( &rotaryrgb ) )
{
old_rot_state = 0;
start_rot_status = rotaryrgb_get_state_enb( &rotaryrgb ) && rotaryrgb_get_state_ena( &rotaryrgb );
}
else
{
new_rot_state = 1;
if ( new_rot_state != old_rot_state )
{
old_rot_state = 1;
if ( start_rot_status != rotaryrgb_get_state_enb( &rotaryrgb ) )
{
led_pos++;
}
else
{
led_pos--;
}
if ( 0 == led_pos % 17 )
{
Delay_ms ( 1 );
rotaryrgb_set_all_led_color( &rotaryrgb, ROTARYRGB_COLOR_OFF );
}
}
}
}
// ------------------------------------------------------------------------ END
额外支持
资源
类别:旋转编码器