使用Si1143和ATmega328P使交互更加直观和灵敏
让您的存在激发行动的地方

已发布 6月 24, 2024
点击板
Proximity 10 Click
开发板
Arduino UNO Rev3
编译器
NECTO Studio
微控制器单元
ATmega328P
我们致力于使接近技术变得易于获取且具有影响力,塑造人机交互的未来。
A
A
硬件概览
它是如何工作的?
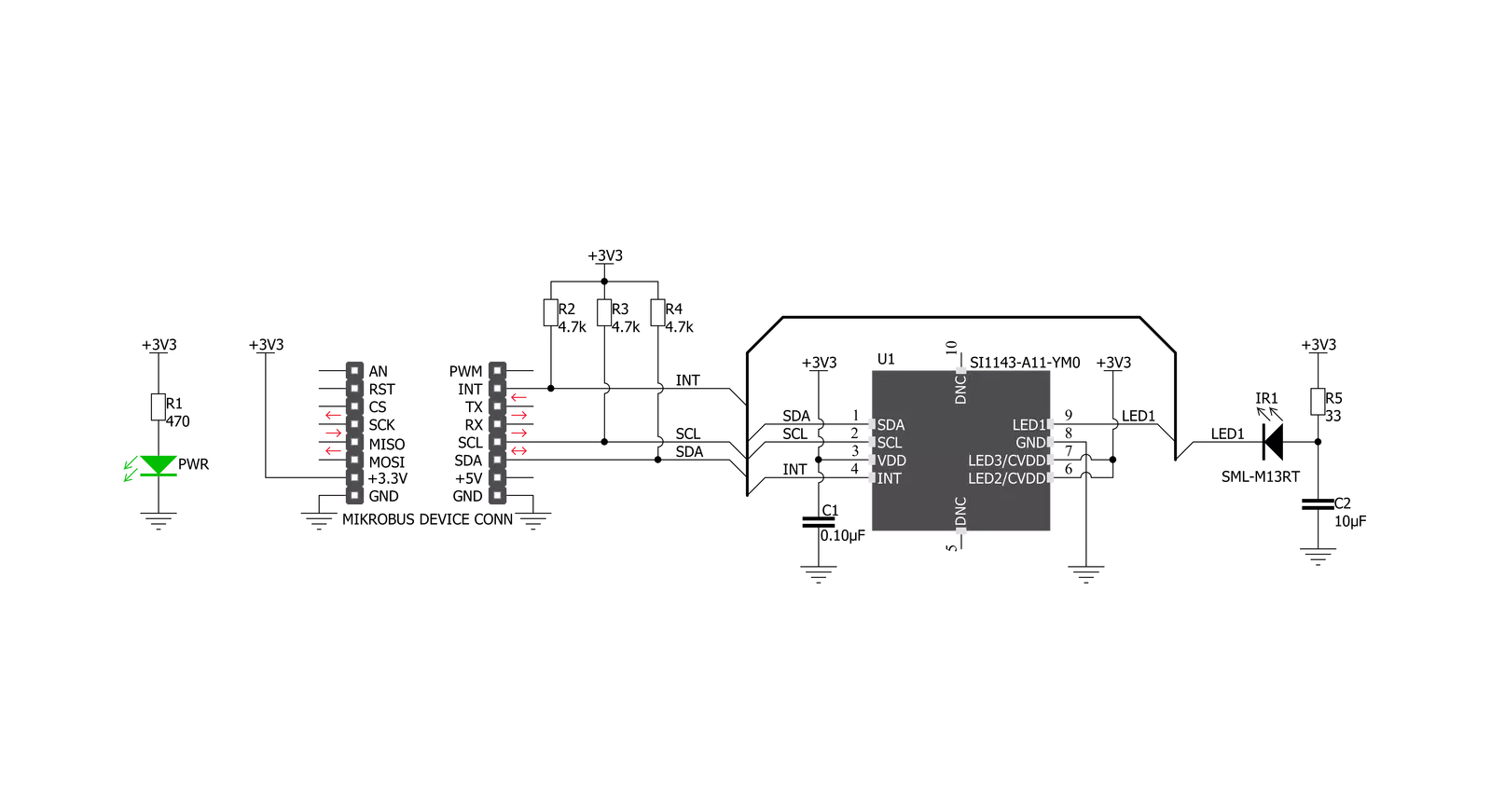
Proximity 10 Click基于Silicon Labs的SI1143,这是一种用于环境光和接近检测的光度传感器。除其他部分外,此IC包含一个LED驱动器,用于驱动外部连接的LED,为SI1143传感部分提供反馈。因此,应选择LED使其光谱与片上光传感器的光谱灵敏度相匹配。为此,Click板™配备了Rohm Semiconductor的窄束LED,其光谱响应特性在870nm达到峰值,是该应用的理想选择。接近检测包括向LED发送脉冲,同时测量反射光的响应。大多数参数是用户可配置的,例如采样频率、脉冲持续时间、平均参
数等。有关寄存器的更深入信息可在SI1143数据表中找到。针对低功耗市场,SI1143使用相对较低的电压范围,在1.7V到3.6V之间。由于大多数MCU使用3.3V,因此此Click板™设计为SI1143 IC直接与mikroBUS™接口。Proximity 10 Click提供一个中断输出引脚,可用于在主机MCU上触发中断。SI1143 IC中断引擎允许多个中断源,这些源可用于在INT引脚上触发状态变化。这些源包括接近检测中断(接近关闭和接近开启)、采样中断等。INT引脚本身是高度可配置的,当断言时,此引脚触发MCU中断,通知其配置的中
断事件已发生。然后,MCU可以读取所需的寄存器输出,而无需不断轮询,从而节省MCU周期和功耗。INT引脚通过电平转换IC路由到mikroBUS™ INT引脚。如前所述,有关SI1143 IC寄存器的详细信息可在数据表中找到。然而,MikroElektronika提供了一个库,包含与MikroElektronika编译器兼容的函数,可用于简化Proximity 10 Click的编程。该库还包含一个示例应用程序,演示其使用方法。此示例应用程序可用作自定义设计的参考。


功能概述
开发板
Arduino UNO 是围绕 ATmega328P 芯片构建的多功能微控制器板。它为各种项目提供了广泛的连接选项,具有 14 个数字输入/输出引脚,其中六个支持 PWM 输出,以及六个模拟输入。其核心组件包括一个 16MHz 的陶瓷谐振器、一个 USB 连接器、一个电
源插孔、一个 ICSP 头和一个复位按钮,提供了为板 子供电和编程所需的一切。UNO 可以通过 USB 连接到计算机,也可以通过 AC-to-DC 适配器或电池供电。作为第一个 USB Arduino 板,它成为 Arduino 平台的基准,"Uno" 符号化其作为系列首款产品的地
位。这个名称选择,意为意大利语中的 "一",是为了 纪念 Arduino Software(IDE)1.0 的推出。最初与 Arduino Software(IDE)版本1.0 同时推出,Uno 自此成为后续 Arduino 发布的基础模型,体现了该平台的演进。

微控制器概述
MCU卡片 / MCU
建筑
AVR
MCU 内存 (KB)
32
硅供应商
Microchip
引脚数
28
RAM (字节)
2048
你完善了我!
配件
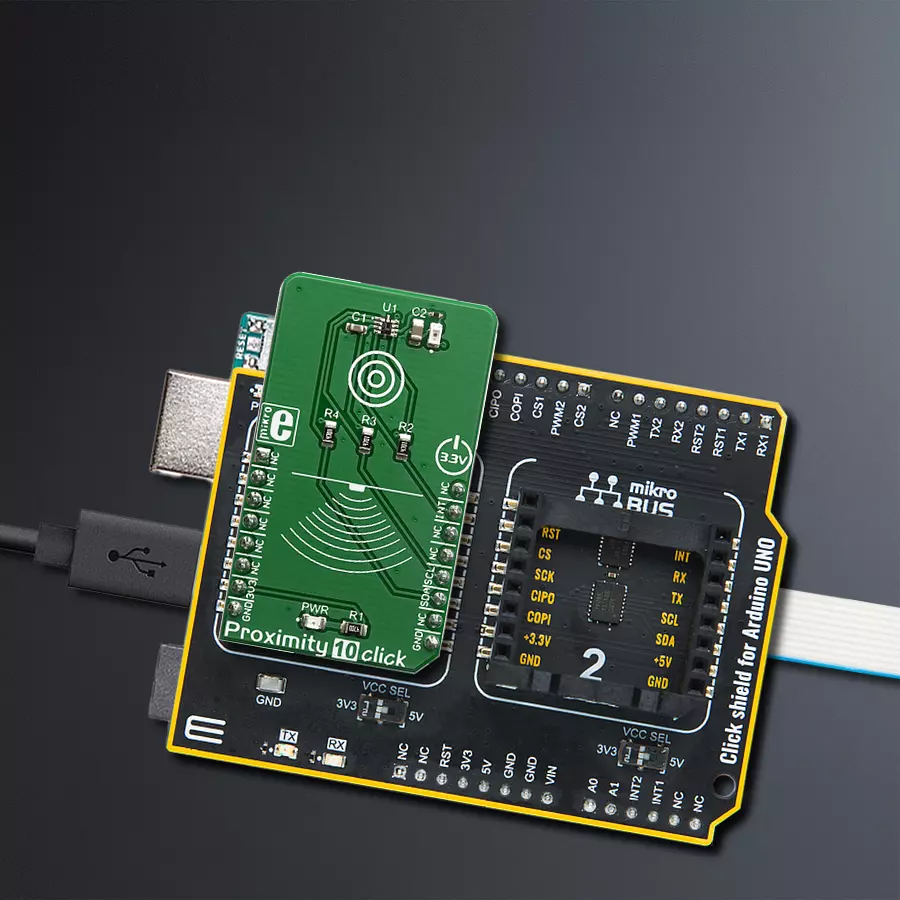
Click Shield for Arduino UNO 具有两个专有的 mikroBUS™ 插座,使所有 Click board™ 设备能够轻松与 Arduino UNO 板进行接口连接。Arduino UNO 是一款基于 ATmega328P 的微控制器开发板,为用户提供了一种经济实惠且灵活的方式来测试新概念并构建基于 ATmega328P 微控制器的原型系统,结合了性能、功耗和功能的多种配置选择。Arduino UNO 具有 14 个数字输入/输出引脚(其中 6 个可用作 PWM 输出)、6 个模拟输入、16 MHz 陶瓷谐振器(CSTCE16M0V53-R0)、USB 接口、电源插座、ICSP 头和复位按钮。大多数 ATmega328P 微控制器的引脚都连接到开发板左右两侧的 IO 引脚,然后再连接到两个 mikroBUS™ 插座。这款 Click Shield 还配备了多个开关,可执行各种功能,例如选择 mikroBUS™ 插座上模拟信号的逻辑电平,以及选择 mikroBUS™ 插座本身的逻辑电压电平。此外,用户还可以通过现有的双向电平转换电压转换器使用任何 Click board™,无论 Click board™ 运行在 3.3V 还是 5V 逻辑电压电平。一旦将 Arduino UNO 板与 Click Shield for Arduino UNO 连接,用户即可访问数百种 Click board™,并兼容 3.3V 或 5V 逻辑电压电平的设备。

使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
Click board™ 原理图
一步一步来
项目组装

从选择您的开发板和Click板™开始。以Arduino UNO Rev3作为您的开发板开始。













实时跟踪您的结果
应用程序输出
1. 应用程序输出 - 在调试模式下,“应用程序输出”窗口支持实时数据监控,直接提供执行结果的可视化。请按照提供的教程正确配置环境,以确保数据正确显示。

2. UART 终端 - 使用UART Terminal通过USB to UART converter监视数据传输,实现Click board™与开发系统之间的直接通信。请根据项目需求配置波特率和其他串行设置,以确保正常运行。有关分步设置说明,请参考提供的教程。

3. Plot 输出 - Plot功能提供了一种强大的方式来可视化实时传感器数据,使趋势分析、调试和多个数据点的对比变得更加直观。要正确设置,请按照提供的教程,其中包含使用Plot功能显示Click board™读数的分步示例。在代码中使用Plot功能时,请使用以下函数:plot(insert_graph_name, variable_name);。这是一个通用格式,用户需要将“insert_graph_name”替换为实际图表名称,并将“variable_name”替换为要显示的参数。

软件支持
库描述
此库包含Proximity 10 Click驱动程序的API。
关键功能:
proximity10_check_int_status- 此功能检查所需的中断标志状态。proximity10_send_command- 此功能允许用户执行所需的命令并检查响应。proximity10_param_set- 此功能将选定参数设置为所需值,并检查响应。
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* \file
* \brief Proximity10 Click example
*
* # Description
* This application enables proximity sensor to detect objects from distance up to 20cm.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes I2C serial interface and performs a device wake up, reset and
* all necessary configurations.
* The device will wake up and performs measurements every 10 milliseconds.
*
* ## Application Task
* Reads the proximity PS1 data value and sends result to the uart terminal.
* If measured proximity value is greater than selected proximity threshold value, the interrupt will be generated and
* the message will be showed on the uart terminal.
* When interrupt is generated the Sound function will make an alarm sound with determined duration depending on the detected proximity value,
* how much is object away or close from the sensor.
*
* *note:*
* Additional Functions :
* - checkResponse - Sends an error code message to the uart terminal if error code is detected in the response.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "proximity10.h"
// ------------------------------------------------------------------ VARIABLES
static proximity10_t proximity10;
static log_t logger;
// ------------------------------------------------------- ADDITIONAL FUNCTIONS
void check_response ( uint8_t cmd_resp )
{
switch ( cmd_resp )
{
case PROXIMITY10_INVALID_CMD_ENCOUNT :
{
log_printf( &logger, "** Invalid Command Encountered during command processing **\r\n" );
break;
}
case PROXIMITY10_ADC_OVRFLOW_ENCOUNT_PS1 :
{
log_printf( &logger, "** ADC Overflow Encountered during PS1 measurement **\r\n" );
break;
}
case PROXIMITY10_ADC_OVRFLOW_ENCOUNT_PS2 :
{
log_printf( &logger, "** ADC Overflow Encountered during PS2 measurement **\r\n" );
break;
}
case PROXIMITY10_ADC_OVRFLOW_ENCOUNT_PS3 :
{
log_printf( &logger, "** ADC Overflow Encountered during PS3 measurement **\r\n" );
break;
}
case PROXIMITY10_ADC_OVRFLOW_ENCOUNT_ALS_VIS :
{
log_printf( &logger, "** ADC Overflow Encountered during ALS-VIS measurement **\r\n" );
break;
}
case PROXIMITY10_ADC_OVRFLOW_ENCOUNT_ALS_IR :
{
log_printf( &logger, "** ADC Overflow Encountered during ALS-IR measurement **\r\n" );
break;
}
case PROXIMITY10_ADC_OVRFLOW_ENCOUNT_AUX :
{
log_printf( &logger, "** ADC Overflow Encountered during AUX measurement **\r\n" );
break;
}
default :
{
break;
}
}
}
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
proximity10_cfg_t cfg;
uint8_t w_temp;
uint8_t cmd_resp;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
proximity10_cfg_setup( &cfg );
PROXIMITY10_MAP_MIKROBUS( cfg, MIKROBUS_1 );
proximity10_init( &proximity10, &cfg );
Delay_ms( 2000 );
w_temp = PROXIMITY10_HW_KEY;
proximity10_generic_write( &proximity10, PROXIMITY10_HW_KEY_REG, &w_temp, 1 );
cmd_resp = proximity10_send_command( &proximity10, PROXIMITY10_NOP_CMD );
check_response( cmd_resp );
cmd_resp = proximity10_send_command( &proximity10, PROXIMITY10_RESET_CMD );
check_response( cmd_resp );
Delay_ms( 2000 );
cmd_resp = proximity10_param_set( &proximity10, PROXIMITY10_CHLIST_PARAM, PROXIMITY10_EN_AUX | PROXIMITY10_EN_ALS_IR | PROXIMITY10_EN_ALS_VIS | PROXIMITY10_EN_PS1 );
check_response( cmd_resp );
cmd_resp = proximity10_param_set( &proximity10, PROXIMITY10_PSLED12_SEL_PARAM, PROXIMITY10_LED1_DRIVE_EN );
check_response( cmd_resp );
cmd_resp = proximity10_param_set( &proximity10, PROXIMITY10_PS_ADC_MISC_PARAM, PROXIMITY10_NORMAL_SIGNAL_RANGE | PROXIMITY10_NORMAL_PROX_MEAS_MODE );
check_response( cmd_resp );
cmd_resp = proximity10_param_set( &proximity10, PROXIMITY10_PS_ADC_GAIN_PARAM, PROXIMITY10_ADC_CLOCK_DIV_4 );
check_response( cmd_resp );
proximity10_default_cfg ( &proximity10 );
cmd_resp = proximity10_send_command( &proximity10, PROXIMITY10_PS_AUTO_CMD );
check_response( cmd_resp );
//Sound_Init( &GPIOE_ODR, 14 );
log_printf( &logger, "** Proximity 10 is initialized **\r\n" );
log_printf( &logger, "**************************************\r\n" );
Delay_ms( 1000 );
}
void application_task ( void )
{
// Task implementation.
uint32_t proximity;
uint8_t temp_read[ 2 ];
uint8_t int_status;
uint16_t alarm_dur;
proximity10_generic_read( &proximity10, PROXIMITY10_PS1_DATA_REG, &temp_read, 2 );
proximity = temp_read[ 1 ];
proximity <<= 8;
proximity |= temp_read[ 0 ];
log_printf( &logger, "** Proximity PS1 : %u \r\n", proximity );
int_status = proximity10_check_int_status( &proximity10, PROXIMITY10_PS1_INT_FLAG, PROXIMITY10_INT_CLEAR_DIS );
if ( int_status == PROXIMITY10_PS1_INT_FLAG )
{
log_printf( &logger, "** Object is detected **\r\n" );
alarm_dur = proximity / 100;
alarm_dur = alarm_dur + 35;
alarm_dur = ( float )( alarm_dur * 0.30928 );
alarm_dur = 180 - alarm_dur;
//Sound_Play( 1400, alarm_dur );
Delay_ms( 1000 );
}
else
{
Delay_ms( 1000 );
}
log_printf( &logger, "**************************************\r\n" );
}
void main ( void )
{
application_init( );
for ( ; ; )
{
application_task( );
}
}
// ------------------------------------------------------------------------ END
额外支持
资源
类别:接近














