使用FXLS8974CF和STM32F031K6测量正确的加速度
速度至关重要

已发布 10月 01, 2024
点击板
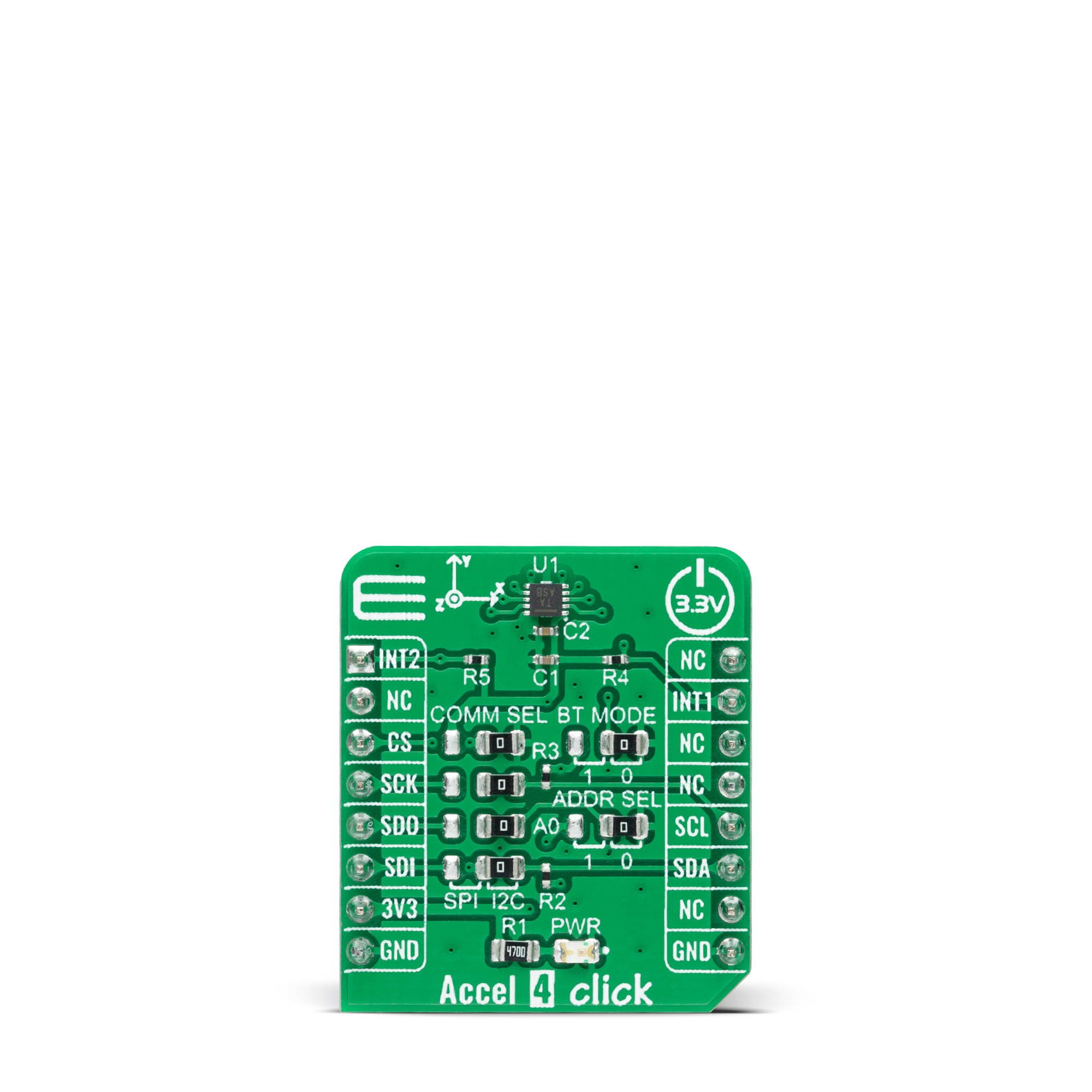
Accel 4 Click
开发板
Nucleo 32 with STM32F031K6 MCU
编译器
NECTO Studio
微控制器单元
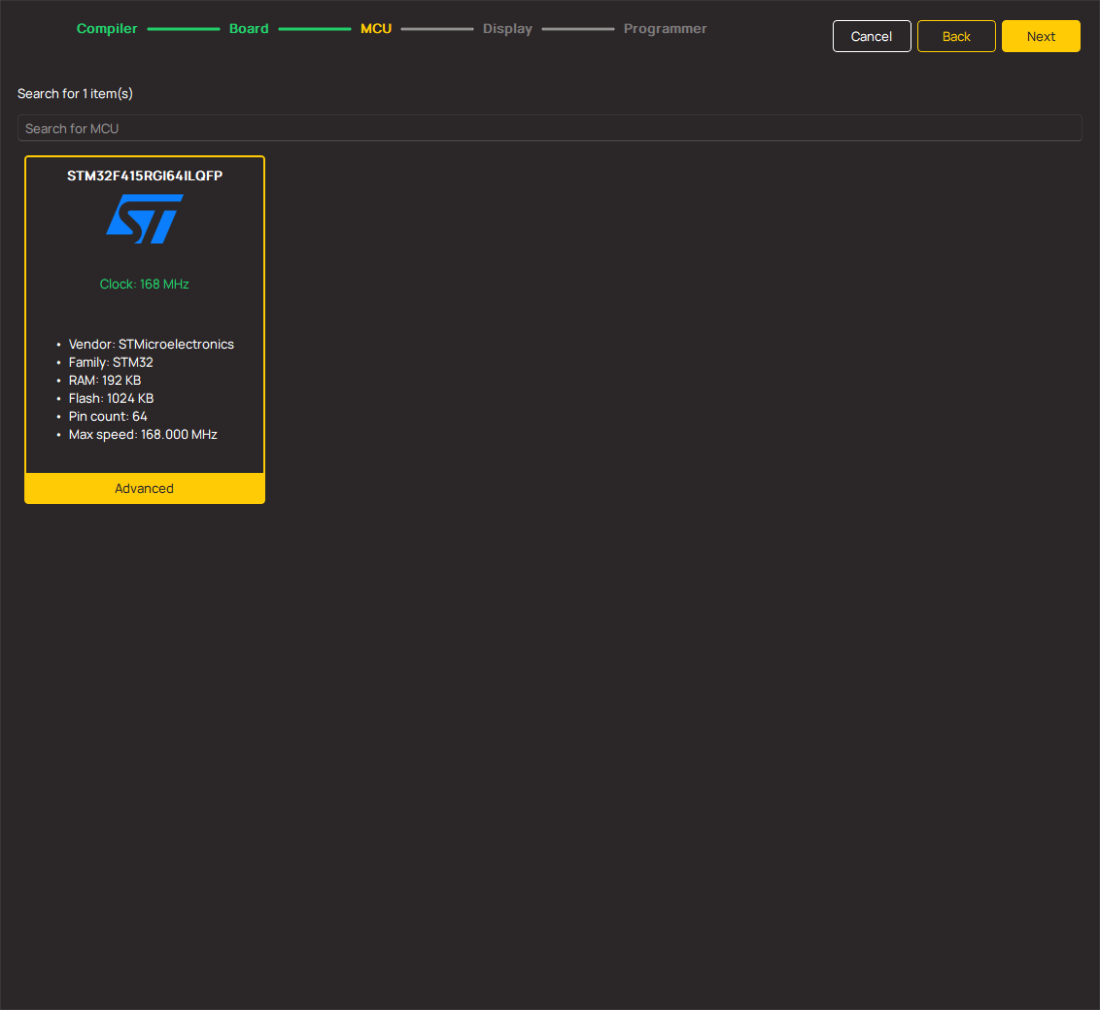
STM32F031K6
确定物体在空间中的位置并监控其运动。
A
A
硬件概览
它是如何工作的?
Accel 4 Click 基于 NXP Semiconductors 的 FXLS8974CF,这是一款高度可靠的数字三轴加速度传感器。FXLS8974CF 具有高度可配置性,具有可编程的加速度范围 ±2g、±4g、±8g 或 ±16g,能够以可选择的输出数据速率测量加速度。它支持高性能和低功耗操作模式,允许最大灵活性,以满足从汽车(便利性和安全性)到工业物联网再到某些消费设备的各种用例的分辨率和功耗需求。此传感器包括高级数字功能,如用于惯性事件检测的 SDCD 块、自动唤醒睡眠和 32 样本 FIFO/LIFO 缓冲区。此外,它还具有嵌入式温度传感器,分辨率为 8 位,灵敏度为 1°C/LSB,测量范围宽。FXLS8974CF 的可
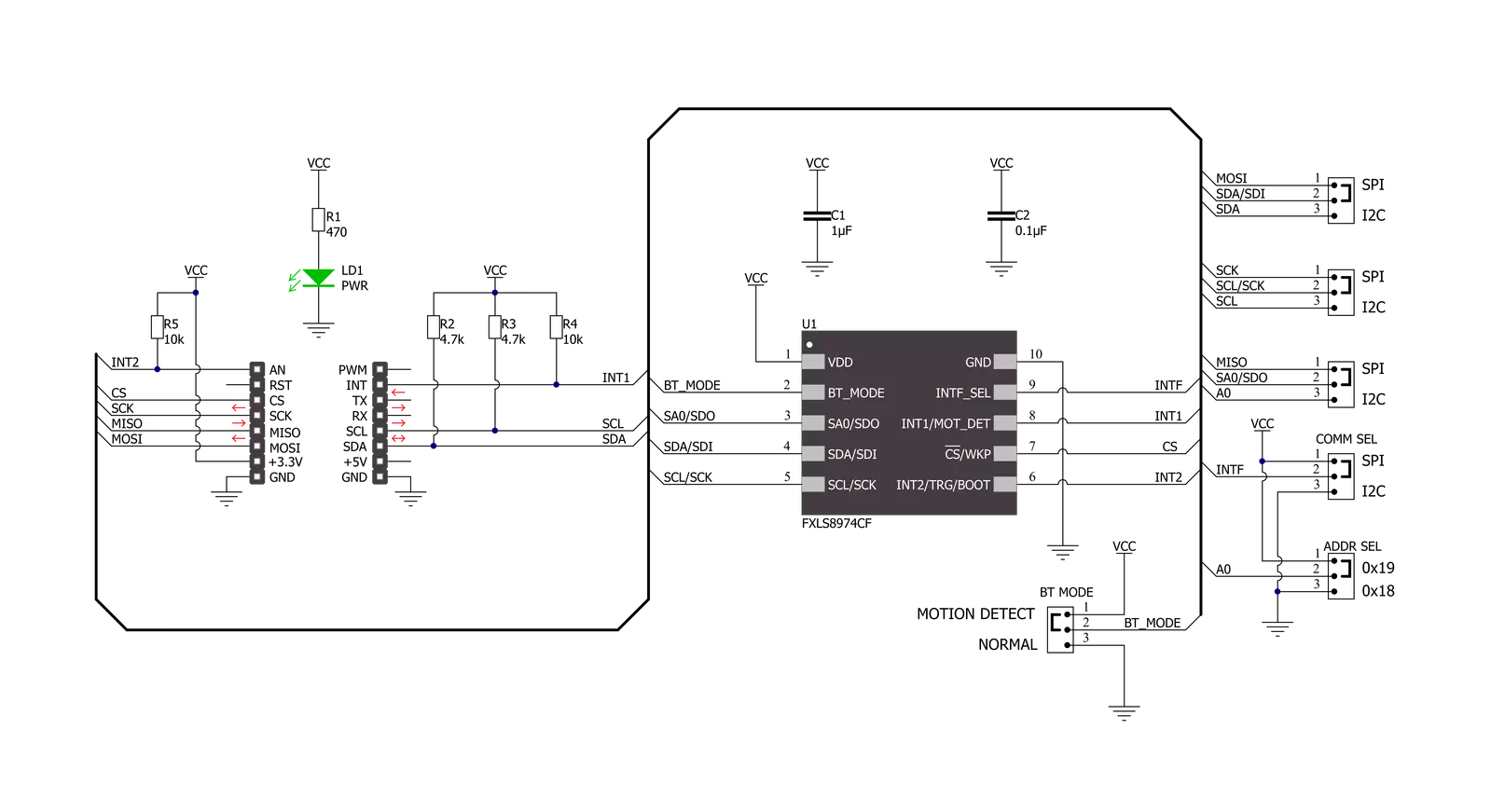
选 ODR(输出数据速率)高达 3200Hz,配合灵活性能模式,允许使用可编程抽取(分辨率)和空闲时间设置的自定义 ODR。Accel 4 Click 允许使用 I2C 和 SPI 接口进行通信,I2C 的最大频率为 1MHz,SPI 的最大频率为 4MHz。选择可以通过将标记为 COMM SEL 的 SMD 跳线定位在适当位置来进行。请注意,所有跳线的位置必须在同一侧,否则 Click board™ 可能会无响应。当选择 I2C 接口时,FXLS8974CF 允许使用标记为 ADDR SEL 的 SMD 跳线选择其 I2C 从地址的最低有效位(LSB)。FXLS8974CF 还具有两个中断,INT1 和 INT2,分别连接到 mikroBUS™ 插座上的 INT 和 AN 引脚,用
于向 MCU 发出检测到事件的信号,完全由用户通过 I2C/SPI 接口编程。此外,此 Click board™ 提供使用 FXLS8974CF 引导模式的能力,通过将标记为 BT MODE 的 SMD 跳线定位在适当位置。根据选择的位置,可以将设备设置为默认操作模式(将跳线设置为位置 0)或运动检测模式(将跳线设置为位置 1)。此 Click board™ 只能在 3.3V 逻辑电压水平下运行。在使用不同逻辑电平的 MCU 之前,板必须执行适当的逻辑电压电平转换。然而,该 Click board™ 配备了包含函数和示例代码的库,可作为进一步开发的参考。
功能概述
开发板
Nucleo 32开发板搭载STM32F031K6 MCU,提供了一种经济且灵活的平台,适用于使用32引脚封装的STM32微控制器进行实验。该开发板具有Arduino™ Nano连接性,便于通过专用扩展板进行功能扩展,并且支持mbed,使其能够无缝集成在线资源。板载集成
ST-LINK/V2-1调试器/编程器,支持通过USB重新枚举,提供三种接口:虚拟串口(Virtual Com port)、大容量存储和调试端口。该开发板的电源供应灵活,可通过USB VBUS或外部电源供电。此外,还配备了三个LED指示灯(LD1用于USB通信,LD2用于电源
指示,LD3为用户可控LED)和一个复位按钮。STM32 Nucleo-32开发板支持多种集成开发环境(IDEs),如IAR™、Keil®和基于GCC的IDE(如AC6 SW4STM32),使其成为开发人员的多功能工具。

微控制器概述
MCU卡片 / MCU

建筑
ARM Cortex-M0
MCU 内存 (KB)
32
硅供应商
STMicroelectronics
引脚数
32
RAM (字节)
4096
你完善了我!
配件
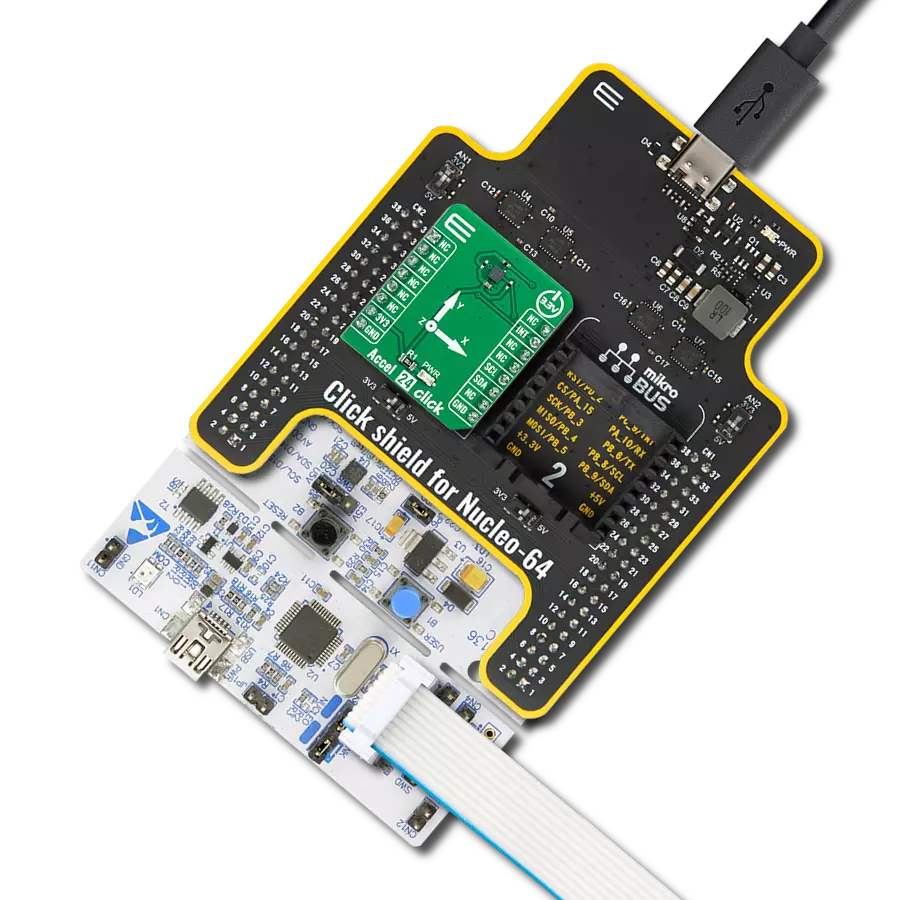
Click Shield for Nucleo-32是扩展您的开发板功能的理想选择,专为STM32 Nucleo-32引脚布局设计。Click Shield for Nucleo-32提供了两个mikroBUS™插座,可以添加来自我们不断增长的Click板™系列中的任何功能。从传感器和WiFi收发器到电机控制和音频放大器,我们应有尽有。Click Shield for Nucleo-32与STM32 Nucleo-32开发板兼容,为用户提供了一种经济且灵活的方式,使用任何STM32微控制器快速创建原型,并尝试各种性能、功耗和功能的组合。STM32 Nucleo-32开发板无需任何独立的探针,因为它集成了ST-LINK/V2-1调试器/编程器,并随附STM32全面的软件HAL库和各种打包的软件示例。这个开发平台为用户提供了一种简便且通用的方式,将STM32 Nucleo-32兼容开发板与他们喜欢的Click板™结合,应用于即将开展的项目中。

使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
Click board™ 原理图
一步一步来
项目组装

从选择您的开发板和Click板™开始。以Nucleo 32 with STM32F031K6 MCU作为您的开发板开始。













软件支持
库描述
该库包含 Accel 4 Click 驱动程序的 API。
关键功能:
accel4_get_int1- 获取中断 1 引脚状态。accel4_axes_get_resolution- 读取输出数据的当前分辨率。accel4_get_axes_data- 加速度数据读取。
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* @file main.c
* @brief Accel4 Click example
*
* # Description
* This example is a showcase of the ability of the device
* to read 3 axis data in varity of 3 resolutions, ability
* to configure 2 interrput pins for user needs etc..
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializion of communication modules (I2C/SPI, UART) and
* additional interrupt pins. Reading status register in loop
* until power up bit is set to 1. Then reads device ID and checks
* if it's valid, and in the end configures device to get interrupt
* on new data received, set device in active mode and sets currently
* configured resolution to context object.
*
* ## Application Task
* Reads data of all 3 axes whenever interrupt is received and logs it.
*
* @author Luka Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "accel4.h"
static accel4_t accel4;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
accel4_cfg_t accel4_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
accel4_cfg_setup( &accel4_cfg );
ACCEL4_MAP_MIKROBUS( accel4_cfg, MIKROBUS_1 );
err_t init_flag = accel4_init( &accel4, &accel4_cfg );
if ( ( I2C_MASTER_ERROR == init_flag ) || ( SPI_MASTER_ERROR == init_flag ) )
{
log_error( &logger, " Application Init Error. " );
log_info( &logger, " Please, run program again... " );
for ( ; ; );
}
uint8_t temp_data = 0;
// Wait for the powerup status
do {
accel4_generic_read( &accel4, ACCEL4_REG_INT_STATUS, &temp_data, 1 );
Delay_ms ( 1 );
}while ( ( temp_data & 1 ) != 1 );
//Read device ID
accel4_generic_read( &accel4, ACCEL4_REG_WHO_AM_I, &temp_data, 1 );
log_printf( &logger, " > WHO AM I: 0x%.2X\r\n", ( uint16_t )temp_data );
if ( ACCEL4_DEVICE_ID != temp_data )
{
log_error( &logger, " ID" );
for( ; ; );
}
accel4_default_cfg ( &accel4 );
Delay_ms ( 1000 );
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
if ( accel4_get_int1( &accel4 ) )
{
accel4_axes_t axes;
accel4_get_axes_data( &accel4, &axes );
log_printf( &logger, " > X: %.2f\r\n", axes.x );
log_printf( &logger, " > Y: %.2f\r\n", axes.y );
log_printf( &logger, " > Z: %.2f\r\n", axes.z );
log_printf( &logger, "*****************************************\r\n" );
Delay_ms ( 300 );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
额外支持
资源
类别:运动