Measure motion and acceleration with KX134-1211 and STM32F302VC
The dance of data: How accelerometers revolutionize our world

Published Oct 05, 2023
Click board™
Accel 20 Click
Dev. board
Fusion for ARM v8
Compiler
NECTO Studio
MCU
STM32F302VC
This solution makes it possible to enhance safety by monitoring and alerting for sudden movements or impacts
A
A
Hardware Overview
How does it work?
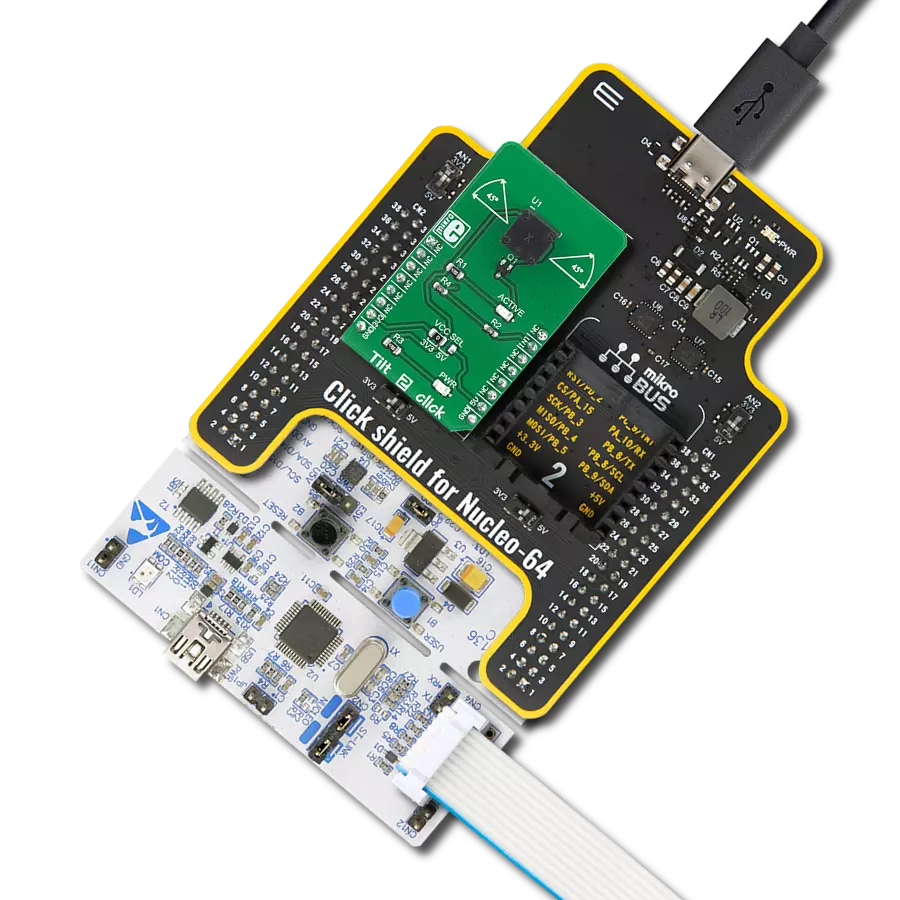
Accel 20 Click is based on the KX134-1211, a highly reliable digital triaxial acceleration sensor with a feature set optimized for machine condition monitoring from Rohm Semiconductor. The KX134-1211 is highly configurable with a programmable acceleration range of ±8/±16/±32/±64g, providing signal conditioning and intelligent user-programmable application algorithms with improved linearity over the entire temperature range. It also has an Advanced Data Path (ADP) technology, which allows noise filtering and sensor signal processing, usually carried out by the MCU, to be performed by the accelerometer. They contribute to reducing MCU load and power consumption and improving application performance. Acceleration sensing is based on the principle of a differential capacitance arising from the acceleration-induced motion of
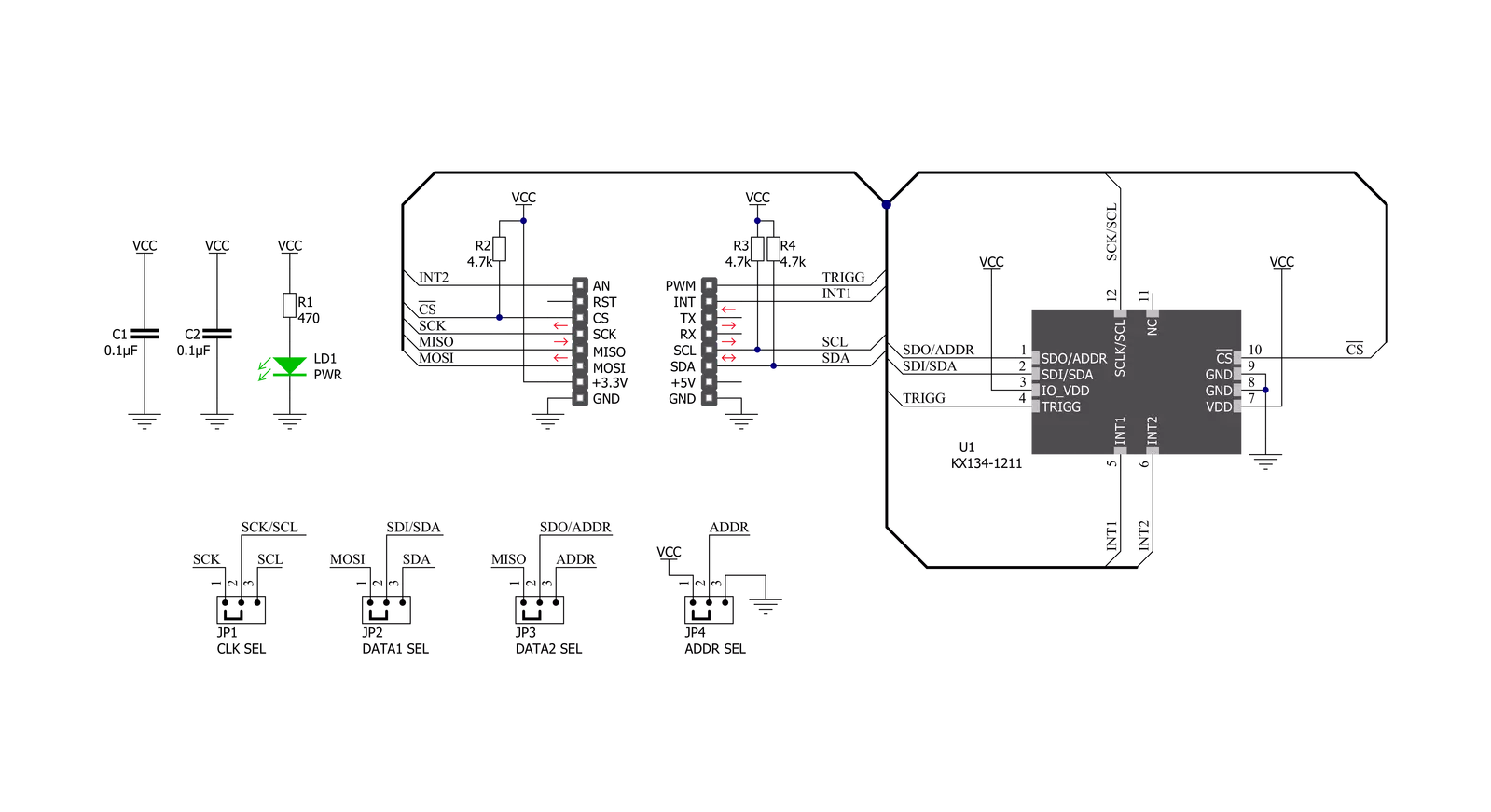
the sensing element, which is hermetically sealed at the wafer level by bonding a second silicon lid wafer to the device wafer, further utilizing a standard mode cancellation to decrease errors from process variation, temperature, and environmental stress. The KX134-1211 also features an advanced Wake-Up and Back-to-Sleep detection with a high-resolution threshold capability configurable down to 15.6mg, 512-byte buffer that continues to record data even when being read, as well as embedded engines for orientation, directional/double-tap, and free-fall detection. Accel 20 Click allows the use of both I2C and SPI interfaces with a maximum frequency of 3.4MHz for I2C and 10MHz for SPI communication. The selection can be made by positioning SMD jumpers labeled COMM SEL in an appropriate position. Note that all the jumpers' positions must
be on the same side, or the Click board™ may become unresponsive. While the I2C interface is selected, the KX134-1211 allows choosing the least significant bit (LSB) of its I2C slave address using the SMD jumper labeled ADDR SEL. The Accel 20 also possesses two interrupts, I1 and I2, routed to the INT and AN pins on the mikroBUS™ used to signal MCU that an event has been sensed, and one trigger pin labeled as TRG, routed to the PWM pins on the mikroBUS™ socket, used for FIFO buffer control. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. Also, it comes equipped with a library containing functions and an example code that can be used as a reference for further development.


Features overview
Development board
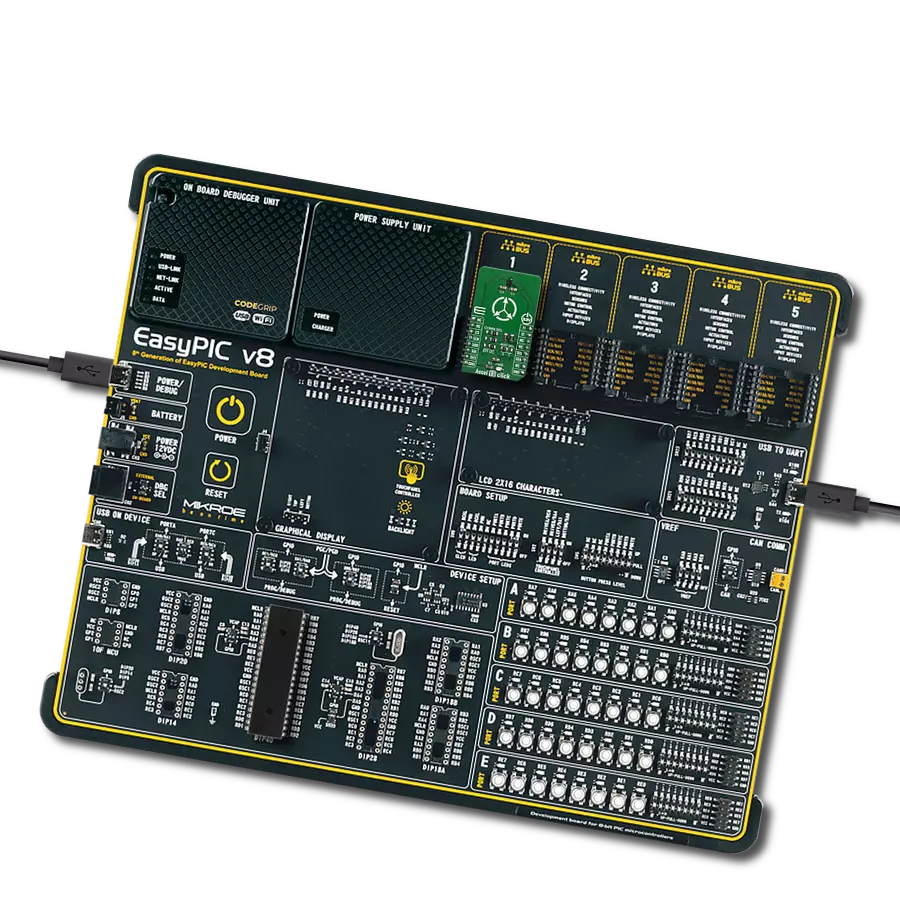
Fusion for ARM v8 is a development board specially designed for the needs of rapid development of embedded applications. It supports a wide range of microcontrollers, such as different ARM® Cortex®-M based MCUs regardless of their number of pins, and a broad set of unique functions, such as the first-ever embedded debugger/programmer over WiFi. The development board is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, connectors, and others, in one place. Thanks to innovative manufacturing technology, Fusion for ARM v8 provides a fluid and immersive working experience, allowing access anywhere and under any
circumstances at any time. Each part of the Fusion for ARM v8 development board contains the components necessary for the most efficient operation of the same board. An advanced integrated CODEGRIP programmer/debugger module offers many valuable programming/debugging options, including support for JTAG, SWD, and SWO Trace (Single Wire Output)), and seamless integration with the Mikroe software environment. Besides, it also includes a clean and regulated power supply module for the development board. It can use a wide range of external power sources, including a battery, an external 12V power supply, and a power source via the USB Type-C (USB-C) connector.
Communication options such as USB-UART, USB HOST/DEVICE, CAN (on the MCU card, if supported), and Ethernet is also included. In addition, it also has the well-established mikroBUS™ standard, a standardized socket for the MCU card (SiBRAIN standard), and two display options for the TFT board line of products and character-based LCD. Fusion for ARM v8 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
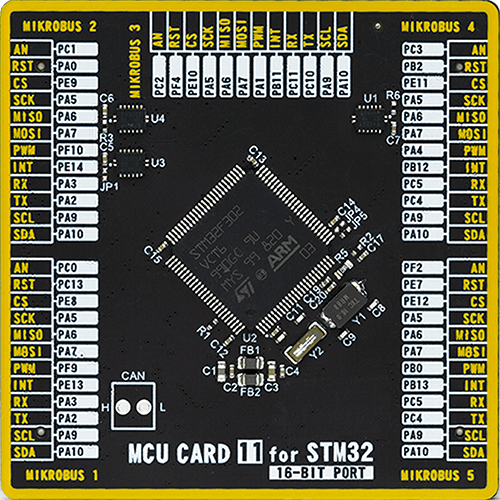
Type
8th Generation
Architecture
ARM Cortex-M4
MCU Memory (KB)
256
Silicon Vendor
STMicroelectronics
Pin count
100
RAM (Bytes)
40960
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Fusion for ARM v8 as your development board.













Software Support
Library Description
This library contains API for Accel 20 Click driver.
Key functions:
accel20_get_axis_data- Accel 20 get accelerometer axis functionaccel20_set_output_data_rate- Accel 20 set output data rate functionaccel20_set_accel_range- Accel 20 set accel range function
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief Accel20 Click example
*
* # Description
* This library contains API for Accel 20 Click driver.
* The library initializes and defines the I2C or SPI bus drivers
* to write and read data from registers.
* The library also includes a function for reading X-axis, Y-axis, and Z-axis data.
*
* The demo application is composed of two sections :
*
* ## Application Init
* The initialization of I2C or SPI module, log UART, and additional pins.
* After the driver init, the app executes a default configuration,
* checks communication and device ID.
*
* ## Application Task
* This is an example that demonstrates the use of the Accel 20 Click board™.
* Measures and displays acceleration data for X-axis, Y-axis, and Z-axis.
* Results are being sent to the USART terminal where the user can track their changes.
* This task repeats every 1 sec.
*
* @author Nenad Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "accel20.h"
static accel20_t accel20;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
accel20_cfg_t accel20_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
accel20_cfg_setup( &accel20_cfg );
ACCEL20_MAP_MIKROBUS( accel20_cfg, MIKROBUS_1 );
err_t init_flag = accel20_init( &accel20, &accel20_cfg );
if ( ( I2C_MASTER_ERROR == init_flag ) || ( SPI_MASTER_ERROR == init_flag ) )
{
log_error( &logger, " Application Init Error. " );
log_info( &logger, " Please, run program again... " );
for ( ; ; );
}
accel20_default_cfg ( &accel20 );
log_info( &logger, " Application Task " );
log_printf( &logger, "-------------------------\r\n" );
log_printf( &logger, " Accel 20 Click \r\n" );
log_printf( &logger, "-------------------------\r\n" );
Delay_ms ( 100 );
if ( accel20_check_id( &accel20 ) == ACCEL20_OK )
{
log_printf( &logger, " Communication OK \r\n" );
log_printf( &logger, "-------------------------\r\n" );
}
else
{
log_printf( &logger, " Communication ERROR \r\n" );
log_printf( &logger, " Reset the device \r\n" );
log_printf( &logger, "-------------------------\r\n" );
for ( ; ; );
}
log_printf( &logger, " Accel Data: \r\n" );
log_printf( &logger, "-------------------------\r\n" );
Delay_ms ( 100 );
}
void application_task ( void )
{
static accel20_axis_t axis;
if ( accel20_get_int_1( &accel20 ) == ACCEL20_INT1_DATA_READY )
{
accel20_get_axis_data( &accel20, &axis );
log_printf( &logger, "\tX : %d \r\n\tY : %d \r\n\tZ : %d \r\n", axis.x, axis.y, axis.z );
log_printf( &logger, "-------------------------\r\n" );
Delay_ms ( 1000 );
}
Delay_ms ( 1 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Motion