Custom-crafted control for unrivaled BLDC motor performance based on TC78B009FTG and PIC32MZ2048EFM100
Effortless power at your command
Published Jul 22, 2025
Click board™
Brushless 7 Click
Dev. board
Curiosity PIC32 MZ EF
Compiler
NECTO Studio
MCU
PIC32MZ2048EFM100
Stay ahead of the competition with our brushless motor control solution, offering cutting-edge features and capabilities for superior industrial performance
A
A
Hardware Overview
How does it work?
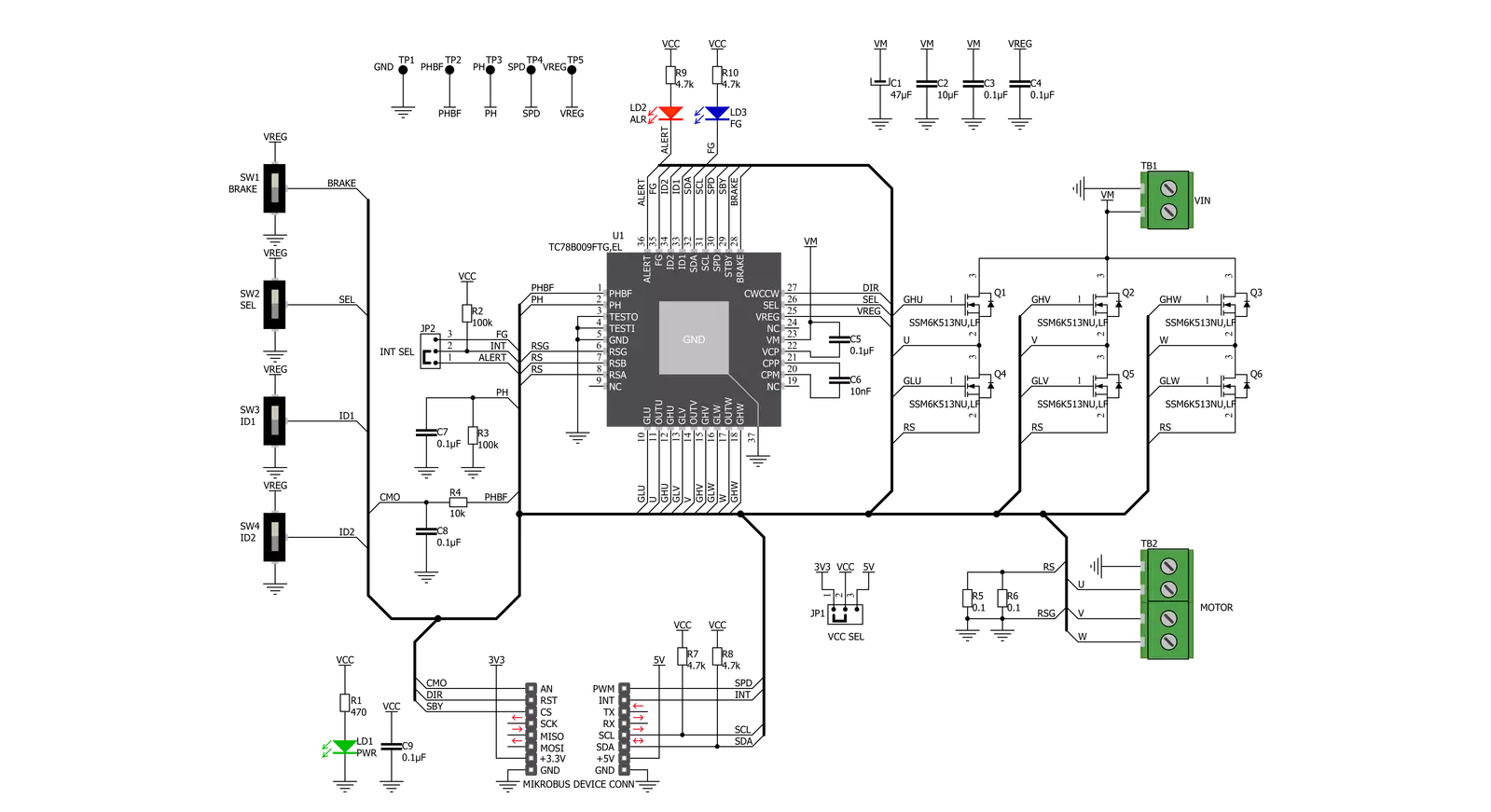
Brushless 7 Click is based on the TC78B009FTG, a three-phase sensorless PWM pre-driver capable of driving Delta or Wye-configured motors from Toshiba Semiconductor. Motor rotation is controlled without Hall sensors by detecting the rotational position from the induced voltage. The TC78B009FTG has a built-in closed-loop speed control function, which regulates and maintains the motor rotational speed under dynamic power fluctuations and load variations. This function has an internal non-volatile memory (NVM) for speed profile setting. The TC78B009FTG also has protection features such as thermal shutdown, under-voltage, over-current protection, lock detection, and more. The TC78B009FTG has a speed control command that controls the motor's start, stop, and rotation count. This signal type is determined by the position of an onboard SW2 switch and register setting, allowing the selection among PWM, analog voltage signal, and standard I2C 2-Wire interface to read data and configure settings with a maximum frequency of 400kHz. The TC78B009FTG also allows choosing its I2C slave address by positioning SMD switches labeled SW3 and SW4 to an appropriate position. In the case of a PWM signal or analog voltage signal, the TC78B009FTG is controlled through the mikroBUS™ PWM signal marked as SPD.
This Click board™ has several operational modes: Standby, Idle, Brake, and Error Mode. Standby mode is available to reduce the power consumption, controlled by the SBY pin routed to the CS pin of the mikroBUS™ socket, together with register settings. After Power-on, with the SBY pin disabled, the TC78B009FTG reads parameters from NVM and stores them in the registers. After that, IC goes to the Brake sequence, controlled via the SW1 switch, and then moves to Idle mode. Whit the speed control command set, the TC78B009FTG starts the motor by Start-Up sequence. When an abnormal condition is detected, IC moves to Error mode and automatically restarts after restart time. In Error mode with Stop as a speed control command, the TC78B009FTG will move to Idle mode. Alongside I2C communication, several signals connected to the mikroBUS™ socket pins are also used to forward the information to the MCU. The DIR pin routed on the RST pin of the mikroBUS™ socket, is used to select the direction of motor rotation (clockwise/counterclockwise), while the CMO pin, routed on the AN pin of the mikroBUS™ socket, serves as the motor's output current monitoring. Also, the TC78B009FTG provides selectable interrupts chosen via the INT SEL jumper routed on the INT pin of the mikroBUS™ socket by
positioning the SMD jumper to an appropriate position marked as ALR or FG. The default position of this jumper is the FG position which serves as a rotation speed indicator, while the ALR position represents an abnormality detection feature. Both features have visual indicators; a red LED marked as ALR and a blue LED labeled as FG. Brushless 7 Click is realized using six N-channel MOSFETs, the SSM6K513NU also from Toshiba Semiconductor, two for each of the three phases. Using these FETs, capable of handling 15A, allows low power dissipation when driving 5A BLDC before hitting the output current limit threshold, which is used to restrain the current flowing to the motor. It also supports an external power supply for the motor, which can be connected to the input terminal labeled as VM and should be within the range of 11V to 27V, while the BLDC motor coils can be connected to the terminals labeled as U, V, and W. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. This Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used, as a reference, for further development.

Features overview
Development board
Curiosity PIC32 MZ EF development board is a fully integrated 32-bit development platform featuring the high-performance PIC32MZ EF Series (PIC32MZ2048EFM) that has a 2MB Flash, 512KB RAM, integrated FPU, Crypto accelerator, and excellent connectivity options. It includes an integrated programmer and debugger, requiring no additional hardware. Users can expand
functionality through MIKROE mikroBUS™ Click™ adapter boards, add Ethernet connectivity with the Microchip PHY daughter board, add WiFi connectivity capability using the Microchip expansions boards, and add audio input and output capability with Microchip audio daughter boards. These boards are fully integrated into PIC32’s powerful software framework, MPLAB Harmony,
which provides a flexible and modular interface to application development a rich set of inter-operable software stacks (TCP-IP, USB), and easy-to-use features. The Curiosity PIC32 MZ EF development board offers expansion capabilities making it an excellent choice for a rapid prototyping board in Connectivity, IOT, and general-purpose applications.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
You complete me!
Accessories
Brushless DC (BLDC) Motor with a Hall sensor represents a high-performance motor from the 42BLF motor series. This motor, wired in a star configuration, boasts a Hall Effect angle of 120°, ensuring precise and reliable performance. With a compact motor length of 47mm and a lightweight design tipping the scales at just 0.29kg, this BLDC motor is engineered to meet your needs. Operating flawlessly at a voltage rating of 24VDC and a speed range of 4000 ± 10% RPM, this motor offers consistent and dependable power. It excels in a normal operational temperature range from -20 to +50°C, maintaining efficiency with a rated current of 1.9A. Also, this product seamlessly integrates with all Brushless Click boards™ and those that require BLDC motors with Hall sensors.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Curiosity PIC32 MZ EF as your development board.













Software Support
Library Description
This library contains API for Brushless 7 Click driver.
Key functions:
brushless7_change_duty- Function for changeing duty of devicebrushless7_max_speed_rpm- Function for setting max rpm parameter of devicebrushless7_control_mode_set- Function for setting type of device control
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief Brushless7 Click example
*
* # Description
* This example demonstrates the use of Brushless 7 Click board.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Sets the default configuration and then configures the Click board for the selected mode.
*
* ## Application Task
* Increases and decreases the speed of the motor rotation by setting the duty cycle or
* rpm values depending on which mode is previously selected.
* It also switches the direction of rotation at the beginning of each cycle.
* All data is being logged on the USB UART where you can track their changes.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "brushless7.h"
// ------------------------------------------------------------------ VARIABLES
static brushless7_t brushless7;
static log_t logger;
uint8_t demo_type_data = 0;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
brushless7_cfg_t cfg;
uint8_t error_flag = 0;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
brushless7_cfg_setup( &cfg );
BRUSHLESS7_MAP_MIKROBUS( cfg, MIKROBUS_1 );
brushless7_init( &brushless7, &cfg );
Delay_ms ( 100 );
brushless7_default_cfg( &brushless7 );
Delay_ms ( 100 );
demo_type_data = BRUSHLESS7_CTRL_TYPE_DUTY;
if ( BRUSHLESS7_CTRL_TYPE_DUTY == demo_type_data )
{
error_flag |= brushless7_max_duty( &brushless7, 95.0 );
error_flag |= brushless7_start_duty( &brushless7, 5.0 );
error_flag |= brushless7_stop_duty( &brushless7, 2.0 );
log_printf( &logger, " ----- DUTY CONTROL ----- \r\n" );
}
else if ( BRUSHLESS7_CTRL_TYPE_RPM == demo_type_data )
{
error_flag |= brushless7_max_speed_rpm( &brushless7, BRUSHLESS7_MAX_SPEED_4096 );
log_printf( &logger, " ----- RPM CONTROL ----- \r\n" );
}
if ( BRUSHLESS7_DEV_ERROR == error_flag )
{
log_printf( &logger, " ----- ERROR ----- \r\n" );
for( ; ; );
}
}
void application_task ( void )
{
brushless7_control_mode_set( &brushless7, BRUSHLESS7_CTRL_TYPE_STOP );
brushless7_toggle_dir_pin_state ( &brushless7 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
brushless7_control_mode_set( &brushless7, demo_type_data );
if ( BRUSHLESS7_CTRL_TYPE_DUTY == demo_type_data )
{
log_printf( &logger, " The motor is accelerating...\r\n" );
log_printf( &logger, "------------------------------\r\n" );
brushless7_change_duty( &brushless7, 70.0 );
// 20 seconds delay
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf( &logger, " The motor is slowing down...\r\n" );
log_printf( &logger, "------------------------------\r\n" );
brushless7_change_duty( &brushless7, 8.0 );
// 20 seconds delay
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
else if ( BRUSHLESS7_CTRL_TYPE_RPM == demo_type_data )
{
log_printf( &logger, " The motor is accelerating...\r\n" );
log_printf( &logger, "------------------------------\r\n" );
brushless7_start_rpm( &brushless7, 1000 );
// 20 seconds delay
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf( &logger, " The motor is slowing down...\r\n" );
log_printf( &logger, "------------------------------\r\n" );
brushless7_start_rpm( &brushless7, 100 );
// 20 seconds delay
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Brushless