Control things like volume or brightness and visually see those adjustments with TLC5925 and ATmega32
Rotary knob with an illuminating ring that shows adjustment levels visually

Published Feb 28, 2024
Click board™
Rotary R 2 Click
Dev. board
EasyAVR v7
Compiler
NECTO Studio
MCU
ATmega32
Ideal for precise user input, such as audio equipment (volume controls), lighting controls (intensity adjustment), or any application where a selection or setting needs to be adjusted accurately
A
A
Hardware Overview
How does it work?
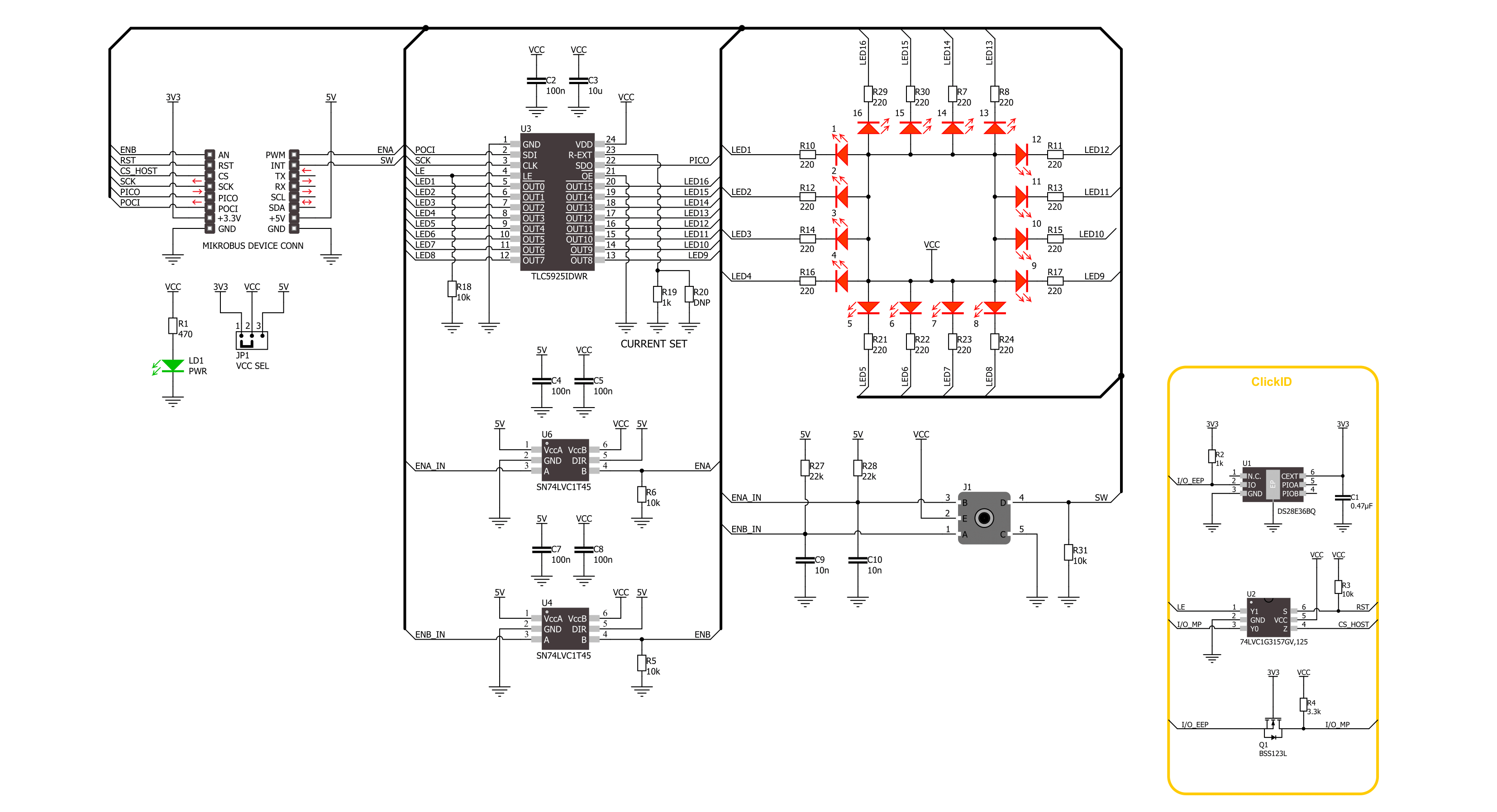
Rotary R 2 Click is based on the TLC5925, a low-power 16-channel constant-current LED sink driver from Texas Instruments that, combined with a high-quality rotary encoder from ALPS, the EC12D1564402, allows you to add a precision input knob to your design. The EC12D1564402 incremental rotary encoder is surrounded by a ring of 16 red LEDs where a single rotation is divided into 15 discrete steps (in contrast to a potentiometer, a rotary encoder can be spun around continuously). The driver can control each LED individually, allowing various lighting effects to be programmed. The encoder outputs A and B signals (out of phase to each other) on the two mikroBUS™ lines, alongside the knob push-button
feature, which outputs through the interrupt line. The EC12D1564402 is a 15-pulse incremental rotary encoder with a push button. This encoder has unique mechanical specifications (debouncing time for its internal switches goes down to 2ms), and it can withstand a huge number of switching cycles, up to 30.000. The supporting debouncing circuitry allows contacts to settle before the output is triggered fully. Rotary R 2 Click uses a standard 4-wire SPI serial interface of the TLC5925 LED driver to communicate with the host MCU supporting clock frequency of up to 30MHz. Rotating the encoder, it outputs A and B signals (out of phase to each other) on the two mikroBUS™ lines, ENA and ENB pins of the
mikroBUS™ socket, alongside the push-button contact, which outputs through the SW pin (interrupt line) of the mikroBUS™ socket. Two SN74LVC1T45 single-bit bus transceivers from Texas Instruments are used for logic-level translation. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
EasyAVR v7 is the seventh generation of AVR development boards specially designed for the needs of rapid development of embedded applications. It supports a wide range of 16-bit AVR microcontrollers from Microchip and has a broad set of unique functions, such as a powerful onboard mikroProg programmer and In-Circuit debugger over USB. The development board is well organized and designed so that the end-user has all the necessary elements in one place, such as switches, buttons, indicators, connectors, and others. With four different connectors for each port, EasyAVR v7 allows you to connect accessory boards, sensors, and custom electronics more
efficiently than ever. Each part of the EasyAVR v7 development board contains the components necessary for the most efficient operation of the same board. An integrated mikroProg, a fast USB 2.0 programmer with mikroICD hardware In-Circuit Debugger, offers many valuable programming/debugging options and seamless integration with the Mikroe software environment. Besides it also includes a clean and regulated power supply block for the development board. It can use a wide range of external power sources, including an external 12V power supply, 7-12V AC or 9-15V DC via DC connector/screw terminals, and a power source via the USB Type-B (USB-B)
connector. Communication options such as USB-UART and RS-232 are also included, alongside the well-established mikroBUS™ standard, three display options (7-segment, graphical, and character-based LCD), and several different DIP sockets which cover a wide range of 16-bit AVR MCUs. EasyAVR v7 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Architecture
AVR
MCU Memory (KB)
32
Silicon Vendor
Microchip
Pin count
40
RAM (Bytes)
2048
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the EasyAVR v7 as your development board.














Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for Rotary R 2 Click driver.
Key functions:
rotaryr2_set_led_pos- This function turns on the LED for the selected LED positionrotaryr2_set_led_data- This function, using SPI serial interface, writes a desired 16-bit datarotaryr2_get_state_switch- This function return rotary encoder switch signal, states of the SW(INT)
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief Rotary R 2 Click example
*
* # Description
* This library contains the API for the Rotary R 2 Click driver
* to control LEDs states and a rotary encoder position readings.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization of SPI module and log UART.
* After the driver init, the app executes a default configuration and turn off all LEDs.
*
* ## Application Task
* This example demonstrates the use of the Rotary R 2 Click board.
* The demo example shows the functionality of a rotary encoder used to control LEDs.
*
* @author Nenad Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "rotaryr2.h"
#define ROTARYR2_ONE_LED ROTARYR2_SET_LED_DATA_1
#define ROTARYR2_TWO_LED ROTARYR2_SET_LED_DATA_1 | ROTARYR2_SET_LED_DATA_9
#define ROTARYR2_FOUR_LED ROTARYR2_SET_LED_DATA_1 | ROTARYR2_SET_LED_DATA_5 | \
ROTARYR2_SET_LED_DATA_9 | ROTARYR2_SET_LED_DATA_13
#define ROTARYR2_EIGHT_LED ROTARYR2_SET_LED_DATA_1 | ROTARYR2_SET_LED_DATA_3 | \
ROTARYR2_SET_LED_DATA_5 | ROTARYR2_SET_LED_DATA_7 | \
ROTARYR2_SET_LED_DATA_9 | ROTARYR2_SET_LED_DATA_11 | \
ROTARYR2_SET_LED_DATA_13 | ROTARYR2_SET_LED_DATA_15
#define ROTARYR2_EIGHT_LED_INV ROTARYR2_SET_LED_DATA_2 | ROTARYR2_SET_LED_DATA_4 | \
ROTARYR2_SET_LED_DATA_6 | ROTARYR2_SET_LED_DATA_8 | \
ROTARYR2_SET_LED_DATA_10 | ROTARYR2_SET_LED_DATA_12 | \
ROTARYR2_SET_LED_DATA_14 | ROTARYR2_SET_LED_DATA_16
static rotaryr2_t rotaryr2;
static log_t logger;
static uint8_t start_rot_status = 0;
static uint8_t led_demo_state = 0;
static uint8_t old_state = 0;
static uint8_t new_state = 1;
static uint8_t old_rot_state = 0;
static uint8_t new_rot_state = 1;
static uint16_t led_data = 1;
/**
* @brief Rotary R 2 select LED demo data function.
* @details This function selects one of the four LED demo data
* based on the current state of the LED demo.
* @return LED demo data:
* @li @c 0x0001 (ROTARYR2_ONE_LED) - Turn ON LED[1],
* @li @c 0x0101 (ROTARYR2_TWO_LED) - Turn ON LED[1,9],
* @li @c 0x0101 (ROTARYR2_FOUR_LED) - Turn ON LED[1,5,9,13],
* @li @c 0x5555 (ROTARYR2_EIGHT_LED) - Turn ON LED[1,3,5,7,9,11,13,15].
*/
static uint16_t rotaryr2_sel_led_demo_data ( uint8_t led_demo_state );
/**
* @brief Rotary R 2 switch detection function.
* @details This function is used for the switch state detection.
* @return Nothing.
*/
static void rotaryr2_switch_detection ( void );
/**
* @brief Rotary R 2 encoder mechanism function.
* @details This function is used to control the state of the LEDs
* by detecting the rotation direction of the rotary encoder.
* @return Nothing.
*/
static void rotaryr2_encoder_mechanism ( void );
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
rotaryr2_cfg_t rotaryr2_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
rotaryr2_cfg_setup( &rotaryr2_cfg );
ROTARYR2_MAP_MIKROBUS( rotaryr2_cfg, MIKROBUS_1 );
if ( SPI_MASTER_ERROR == rotaryr2_init( &rotaryr2, &rotaryr2_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( ROTARYR2_ERROR == rotaryr2_default_cfg ( &rotaryr2 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
if ( ROTARYR2_OK == rotaryr2_set_led_data( &rotaryr2, led_data ) )
{
rotaryr2_switch_detection( );
rotaryr2_encoder_mechanism( );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
static uint16_t rotaryr2_sel_led_demo_data ( uint8_t led_demo_state )
{
switch ( led_demo_state )
{
case 0:
{
return ROTARYR2_ONE_LED;
break;
}
case 1:
{
return ROTARYR2_TWO_LED;
break;
}
case 2:
{
return ROTARYR2_FOUR_LED;
break;
}
case 3:
{
return ROTARYR2_EIGHT_LED;
break;
}
default:
{
return ROTARYR2_ONE_LED;
break;
}
}
}
static void rotaryr2_switch_detection ( void )
{
if ( rotaryr2_get_state_switch( &rotaryr2 ) )
{
new_state = 1;
if ( ( 1 == new_state ) && ( 0 == old_state ) )
{
old_state = 1;
led_demo_state = ( led_demo_state + 1 ) % 5;
if ( 4 == led_demo_state )
{
for ( uint8_t n_cnt = 0; n_cnt < 10; n_cnt++ )
{
rotaryr2_set_led_data( &rotaryr2, ROTARYR2_EIGHT_LED_INV );
Delay_ms ( 100 );
rotaryr2_set_led_data( &rotaryr2, ROTARYR2_EIGHT_LED );
Delay_ms ( 100 );
}
for ( uint8_t led_p = ROTARYR2_SET_LED_POS_1; led_p <= ROTARYR2_SET_LED_POS_16; led_p++ )
{
rotaryr2_set_led_pos( &rotaryr2, led_p );
Delay_ms ( 100 );
}
led_demo_state = 0;
led_data = rotaryr2_sel_led_demo_data( led_demo_state );
}
else
{
led_data = rotaryr2_sel_led_demo_data( led_demo_state );
}
}
}
else
{
old_state = 0;
}
}
static void rotaryr2_encoder_mechanism ( void )
{
if ( rotaryr2_get_state_ena( &rotaryr2 ) == rotaryr2_get_state_enb( &rotaryr2 ) )
{
old_rot_state = 0;
start_rot_status = rotaryr2_get_state_ena( &rotaryr2 ) && rotaryr2_get_state_enb( &rotaryr2 );
}
else
{
new_rot_state = 1;
if ( new_rot_state != old_rot_state )
{
old_rot_state = 1;
if ( start_rot_status != rotaryr2_get_state_ena( &rotaryr2 ) )
{
led_data = ( led_data << 1 ) | ( led_data >> 15 );
}
else
{
led_data = ( led_data >> 1 ) | ( led_data << 15 );
}
}
}
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Rotary encoder