Upgrade your projects with accurate force sensing using 34-00004 and PIC32MZ1024EFH064
Capturing forces with precision

Published Aug 29, 2023
Click board™
Force 3 Click
Dev. board
PIC32MZ clicker
Compiler
NECTO Studio
MCU
PIC32MZ1024EFH064
Gain real-time insights into applied forces for improved analysis
A
A
Hardware Overview
How does it work?
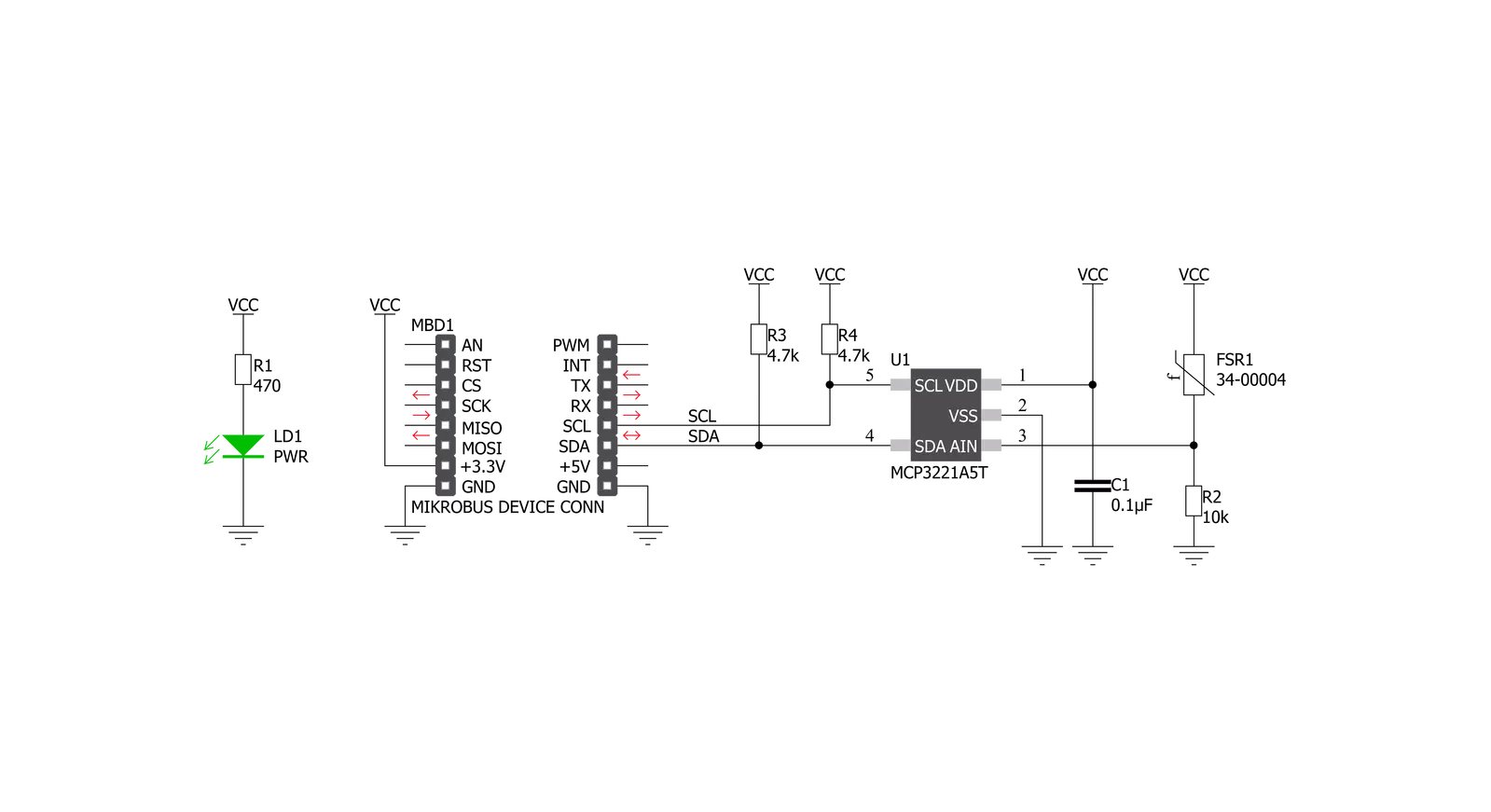
Force 3 Click is based on the FSR 400 series 34-00004 single zone Force Sensing Resistor IC from Interlink Electronics. Force-sensing resistors consist of a conductive polymer, which predictably changes resistance following applying force to its surface. As the force on the sensor is increased, the resistance is decreased. This thin sensor comprises two membranes separated by a spacer around the edges. The top layer of the sensor consists of the area of the force-sensitive layer on the flexible film, while the bottom layer comprises conductive circuit traces on the flexible film. When pressed, the gap between the two membranes gets closed. This shorts the two membranes together with a resistance proportional to an applied force. Force 3 Click also contains all the necessary circuitry
required to obtain precise measurements from the sensor. It communicates with the MCU using the MCP3221, a low-power 12-bit resolution A/D converter with an I2C interface. Data on the I2C bus can be transferred at rates of up to 100 kbit/s in the standard mode and up to 400 kbit/s in the fast mode. Maximum sample rates of 22.3 kSPS are possible with the MCP3221 in a continuous-conversion mode and SCL clock rate of 400 kHz. The sensor is placed in a voltage divider configuration with a fixed resistor R2 (10k). The output voltage is measured across resistor R2 and then sent to the analog pin of the A/D converter MCP3221. Output voltage value was calculated using the voltage divider formula, which was later used in the Test Example to accurately determine
the strength of the applied force. The Test Example is made in such a way that, based on the value of the applied force, it is possible to obtain four output values: Light Touch, Weak Squeeze, Medium Squeeze, and Strong Squeeze. This Click Board™ uses the I2C communication interface. It is designed to be operated only with 3.3V logic levels. A proper logic voltage level conversion should be performed before the Click board™ is used with MCUs with logic levels of 5V. More information about the 34-00004 Force Sensing Resistor can be found in the attached datasheet. However, the Click board™ comes equipped with a library that contains easy-to-use functions and a usage example that may be used as a reference for the development.


Features overview
Development board
PIC32MZ Clicker is a compact starter development board that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit PIC32MZ microcontroller with FPU from Microchip, a USB connector, LED indicators, buttons, a mikroProg connector, and a header for interfacing with external electronics. Thanks to its compact design with clear and easy-recognizable silkscreen markings, it provides a fluid and immersive working experience, allowing access anywhere and under
any circumstances. Each part of the PIC32MZ Clicker development kit contains the components necessary for the most efficient operation of the same board. In addition to the possibility of choosing the PIC32MZ Clicker programming method, using USB HID mikroBootloader, or through an external mikroProg connector for PIC, dsPIC, or PIC32 programmer, the Clicker board also includes a clean and regulated power supply module for the development kit. The USB Micro-B connection can provide up to 500mA of current, which is more than enough to operate all onboard
and additional modules. All communication methods that mikroBUS™ itself supports are on this board, including the well-established mikroBUS™ socket, reset button, and several buttons and LED indicators. PIC32MZ Clicker is an integral part of the Mikroe ecosystem, allowing you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC32
MCU Memory (KB)
1024
Silicon Vendor
Microchip
Pin count
64
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

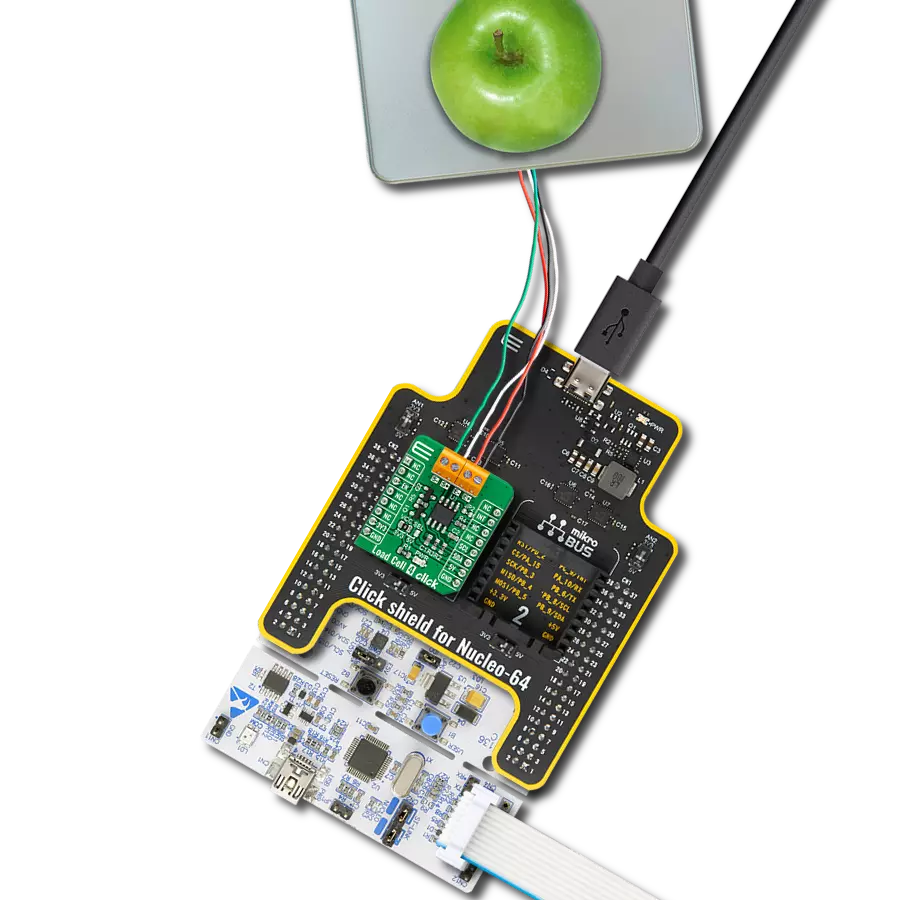
Start by selecting your development board and Click board™. Begin with the PIC32MZ clicker as your development board.













Software Support
Library Description
This library contains API for Force 3 Click driver.
Key functions:
force3_read_raw_data- Read 12bit raw data
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief Force3 Click example
*
* # Description
* This application demonstrates the use of Force 3 Click board.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and makes an initial log.
*
* ## Application Task
* Reads the sensor raw data and displays it on the USB UART.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "force3.h"
// ------------------------------------------------------------------ VARIABLES
static force3_t force3;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
force3_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
force3_cfg_setup( &cfg );
FORCE3_MAP_MIKROBUS( cfg, MIKROBUS_1 );
force3_init( &force3, &cfg );
}
void application_task ( void )
{
uint16_t raw_data;
raw_data = force3_read_raw_data( &force3 );
log_printf( &logger, "Raw data: %d \r\n", raw_data );
if ( ( raw_data > 5 ) && ( raw_data <= 200 ) )
{
log_printf( &logger, ">> Light touch \r\n" );
}
else if ( ( raw_data > 200 ) && ( raw_data <= 500 ) )
{
log_printf( &logger, ">> Light squeeze \r\n" );
}
else if ( ( raw_data > 500 ) && ( raw_data <= 800 ) )
{
log_printf( &logger, ">> Medium squeeze \r\n" );
}
else if ( raw_data > 800 )
{
log_printf( &logger, ">> Big squeeze \r\n" );
}
log_printf( &logger, "----------------------\r\n" );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Force