Experience the accuracy you need for confident weight measurement using ZSC31014 and MK64FN1M0VDC12
Redefining weight scales

Published Aug 29, 2023
Click board™
Load Cell 4 Click
Dev. board
Clicker 2 for Kinetis
Compiler
NECTO Studio
MCU
MK64FN1M0VDC12
Make daily routines smarter by incorporating our precise weight scale solution
A
A
Hardware Overview
How does it work?
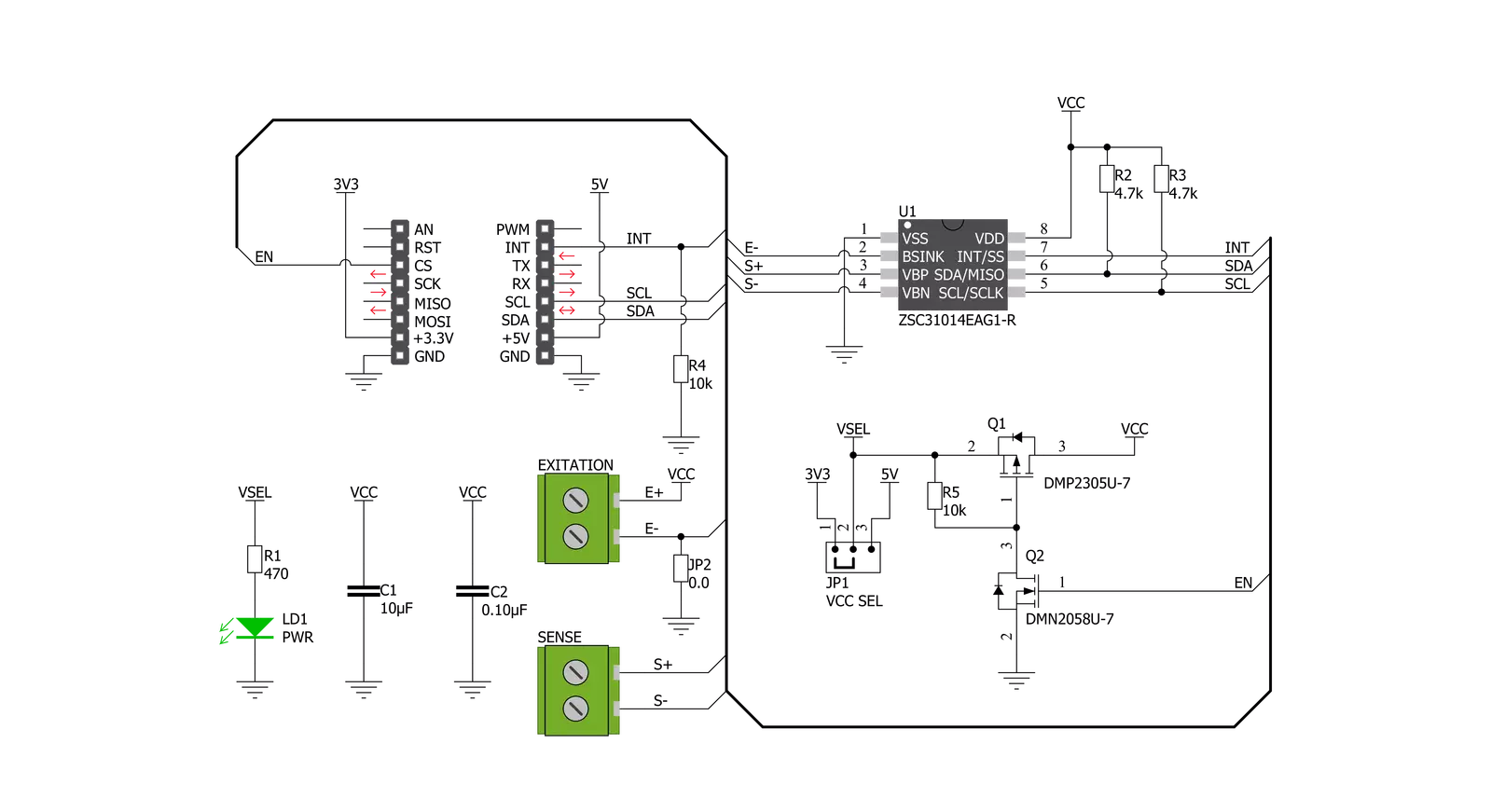
Load Cell 4 Click is based on the ZSC31014, a CMOS integrated circuit for highly accurate amplification and analog-to-digital conversion of differential and half-bridge input signals from Renesas. The ZSC31014 has a fully differential chopper-stabilized preamplifier with eight programmable gain settings (1.5, 3, 6, 12, 24, 48, 96, and 192) through a 14-bit ADC. The resolution of the output depends on the input span and the analog gain setting. The system clock of the ZSC31014 can operate at 1MHz (lower power, better noise performance) or 4MHz (faster sample rates). Internal DSP core uses coefficients stored in EEPROM to calibrate/condition the amplified differential input signal precisely. Temperature can be measured from an internal temperature sensor, which can be calibrated to compensate for the temperature effects of the sensor bridge. After the Power-On
Reset function, the ZSC31014 wakes, and if it receives the Start_CM command during the command window, it goes into Command Mode. This Mode is primarily used in the calibration environment, and during Command Mode, the device executes commands sent by the I2C master. The ZSC31014 remains in Command Mode until it receives the Start_NOM command, which starts the Normal Operation Mode. Operation after the Power-On sequence depends on whether the part is programmed in Sleep Mode or Update Mode. In Sleep Mode, the ZSC31014 waits for commands from the master before taking measurements, while in Update Mode, data is taken at a fixed, selectable rate. Load Cell 4 Click communicates with MCU using the standard I2C 2-Wire interface with a clock frequency from 100 to 400 kHz. The INT pin of the mikroBUS™ socket,
used as an interrupt, rises when new output data is ready and falls when the next I2C communication occurs. It is most useful if the part is configured in Sleep Mode to indicate to the system that a new conversion is ready. Besides, this Click board™ also possesses an Enable pin labeled as EN, routed to the CS pin of the mikroBUS™ socket, which serves to turn the ZSC31014's power supply on/off. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
Clicker 2 for Kinetis is a compact starter development board that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit ARM Cortex-M4F microcontroller, the MK64FN1M0VDC12 from NXP Semiconductors, two mikroBUS™ sockets for Click board™ connectivity, a USB connector, LED indicators, buttons, a JTAG programmer connector, and two 26-pin headers for interfacing with external electronics. Its compact design with clear and easily recognizable silkscreen markings allows you to build gadgets with unique functionalities and
features quickly. Each part of the Clicker 2 for Kinetis development kit contains the components necessary for the most efficient operation of the same board. In addition to the possibility of choosing the Clicker 2 for Kinetis programming method, using a USB HID mikroBootloader or an external mikroProg connector for Kinetis programmer, the Clicker 2 board also includes a clean and regulated power supply module for the development kit. It provides two ways of board-powering; through the USB Micro-B cable, where onboard voltage regulators provide the appropriate voltage levels to each component on the board, or
using a Li-Polymer battery via an onboard battery connector. All communication methods that mikroBUS™ itself supports are on this board, including the well-established mikroBUS™ socket, reset button, and several user-configurable buttons and LED indicators. Clicker 2 for Kinetis is an integral part of the Mikroe ecosystem, allowing you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M4
MCU Memory (KB)
1024
Silicon Vendor
NXP
Pin count
121
RAM (Bytes)
262144
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

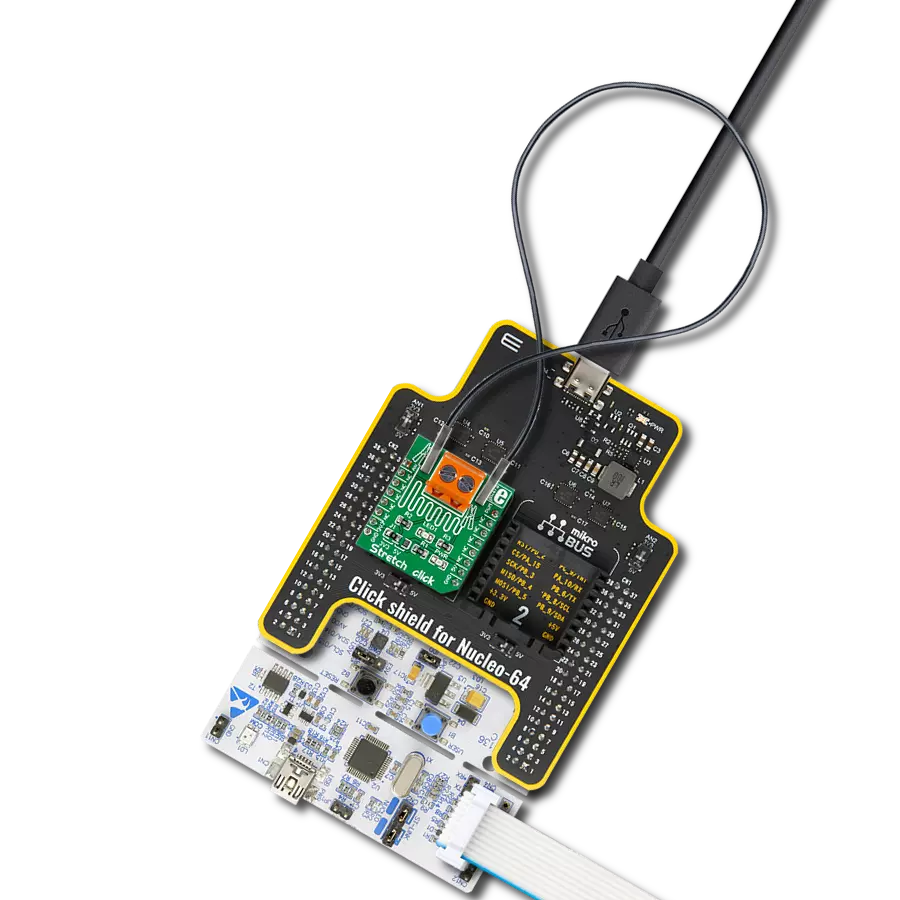
Start by selecting your development board and Click board™. Begin with the Clicker 2 for Kinetis as your development board.














Software Support
Library Description
This library contains API for Load Cell 4 Click driver.
Key functions:
loadcell4_power_dev- Enable power functionloadcell4_tare- Tare the scales functionloadcell4_get_weight- Get weight function.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief LoadCell4 Click example
*
* # Description
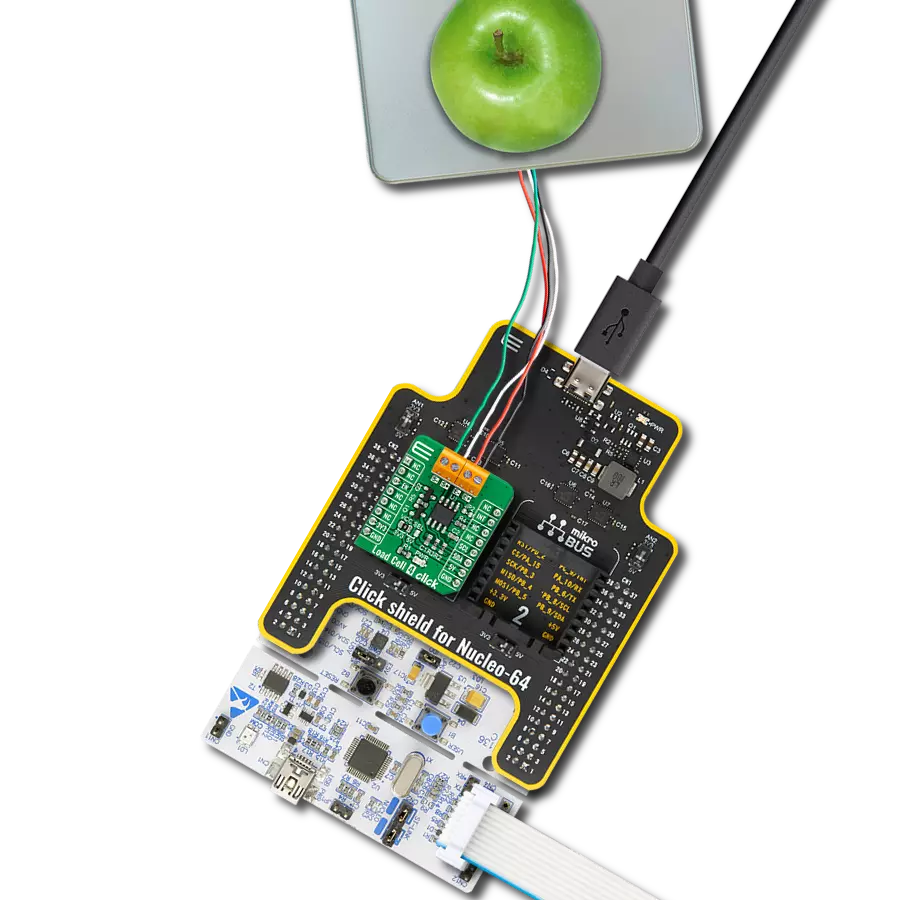
* This is an example that demonstrates the use of the Load Cell 4 Click board.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes I2C driver and performs the power on.
* Sets tare the scale, calibrate scale and start measurements.
*
* ## Application Task
* The Load Cell 4 Click board can be used to measure weight,
* shows the measurement of scales in grams [ g ].
* Results are being sent to the Usart Terminal where you can track their changes.
* All data logs write on USB uart changes for every 4 sec.
*
* @author Stefan Ilic
*
*/
#include "board.h"
#include "log.h"
#include "loadcell4.h"
static loadcell4_t loadcell4;
static log_t logger;
static loadcell4_data_t cell_data;
static float weight_val;
void application_init ( void ) {
log_cfg_t log_cfg; /**< Logger config object. */
loadcell4_cfg_t loadcell4_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
loadcell4_cfg_setup( &loadcell4_cfg );
LOADCELL4_MAP_MIKROBUS( loadcell4_cfg, MIKROBUS_1 );
err_t init_flag = loadcell4_init( &loadcell4, &loadcell4_cfg );
if ( I2C_MASTER_ERROR == init_flag ) {
log_error( &logger, " Application Init Error. " );
log_info( &logger, " Please, run program again... " );
for ( ; ; );
}
loadcell4_default_cfg ( &loadcell4 );
loadcell4_power_dev( &loadcell4, LOADCELL4_PWR_ON );
Delay_ms ( 500 );
log_printf( &logger, "-------------------------\r\n" );
log_printf( &logger, " ~~~ STEP 1 ~~~ \r\n" );
log_printf( &logger, "-------------------------\r\n" );
log_printf( &logger, " Tare the scale : \r\n" );
log_printf( &logger, "- - - - - - - - - - - - -\r\n" );
log_printf( &logger, " >> Remove all object << \r\n" );
log_printf( &logger, "- - - - - - - - - - - - -\r\n" );
log_printf( &logger, " In the following 10 sec \r\n" );
log_printf( &logger, " please remove all object\r\n" );
log_printf( &logger, " from the scale. \r\n" );
// 10 seconds delay
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf( &logger, "-------------------------\r\n" );
log_printf( &logger, " Start tare scales \r\n" );
loadcell4_tare( &loadcell4, &cell_data );
Delay_ms ( 500 );
log_printf( &logger, "-------------------------\r\n" );
log_printf( &logger, " Tarring is complete \r\n" );
log_printf( &logger, "-------------------------\r\n" );
log_printf( &logger, " ~~~ STEP 2 ~~~ \r\n" );
log_printf( &logger, "-------------------------\r\n" );
log_printf( &logger, " Calibrate Scale : \r\n" );
log_printf( &logger, "- - - - - - - - - - - - -\r\n" );
log_printf( &logger, " >>> Load etalon <<< \r\n" );
log_printf( &logger, "- - - - - - - - - - - - -\r\n" );
log_printf( &logger, " In the following 10 sec \r\n" );
log_printf( &logger, "place 100 g weight etalon\r\n" );
log_printf( &logger, " on the scale for \r\n" );
log_printf( &logger, " calibration purpose. \r\n" );
// 10 seconds delay
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf( &logger, "-------------------------\r\n" );
log_printf( &logger, " Start calibration \r\n" );
if ( loadcell4_calibration( &loadcell4, LOADCELL4_WEIGHT_100G, &cell_data ) == LOADCELL4_OK ) {
log_printf( &logger, "-------------------------\r\n" );
log_printf( &logger, " Calibration Done \r\n" );
log_printf( &logger, "- - - - - - - - - - - - -\r\n" );
log_printf( &logger, " >>> Remove etalon <<< \r\n" );
log_printf( &logger, "- - - - - - - - - - - - -\r\n" );
log_printf( &logger, " In the following 10 sec \r\n" );
log_printf( &logger, " remove 100 g weight \r\n" );
log_printf( &logger, " etalon on the scale. \r\n" );
// 10 seconds delay
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
} else {
log_printf( &logger, "-------------------------\r\n" );
log_printf( &logger, " Calibration Error \r\n" );
for ( ; ; );
}
log_printf( &logger, "-------------------------\r\n" );
log_printf( &logger, " Start measurements : \r\n" );
log_printf( &logger, "-------------------------\r\n" );
}
void application_task ( void ) {
weight_val = loadcell4_get_weight( &loadcell4, &cell_data );
log_printf( &logger, " Weight : %.2f g \r\n", weight_val );
Delay_ms ( 100 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Force