Unlock the magic of motion with BMI323 and STM32F767BI
The future of orientation: Elevate your projects with 6DOF IMU

Published Sep 13, 2023
Click board™
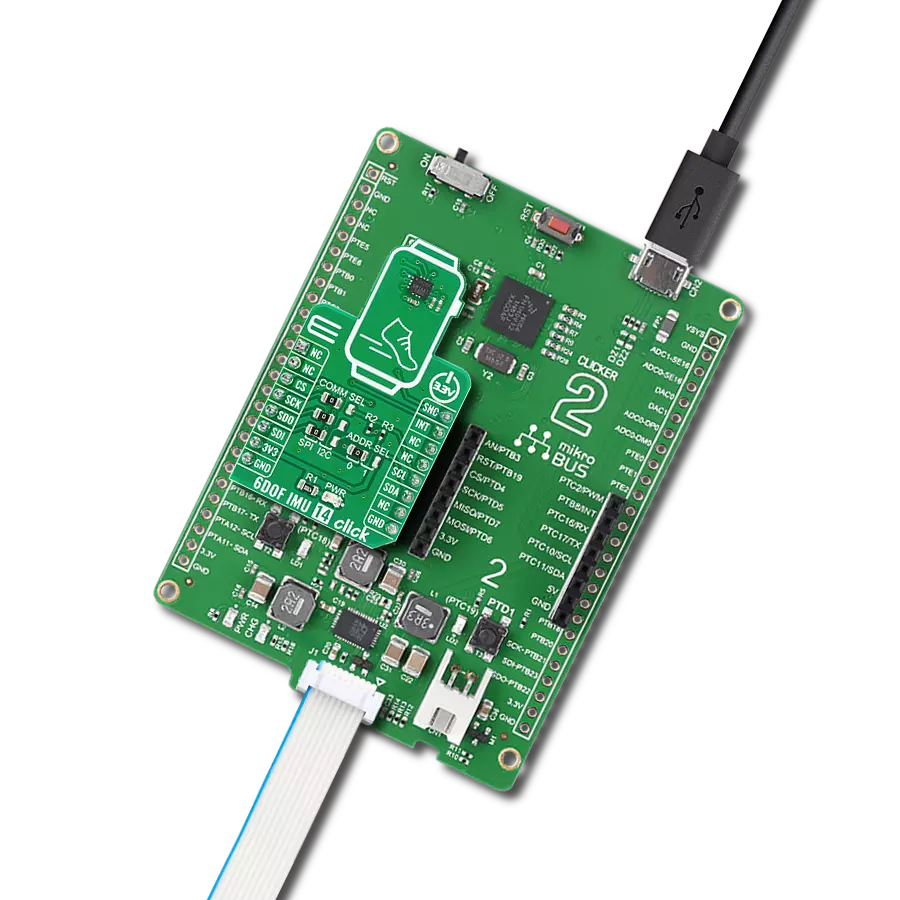
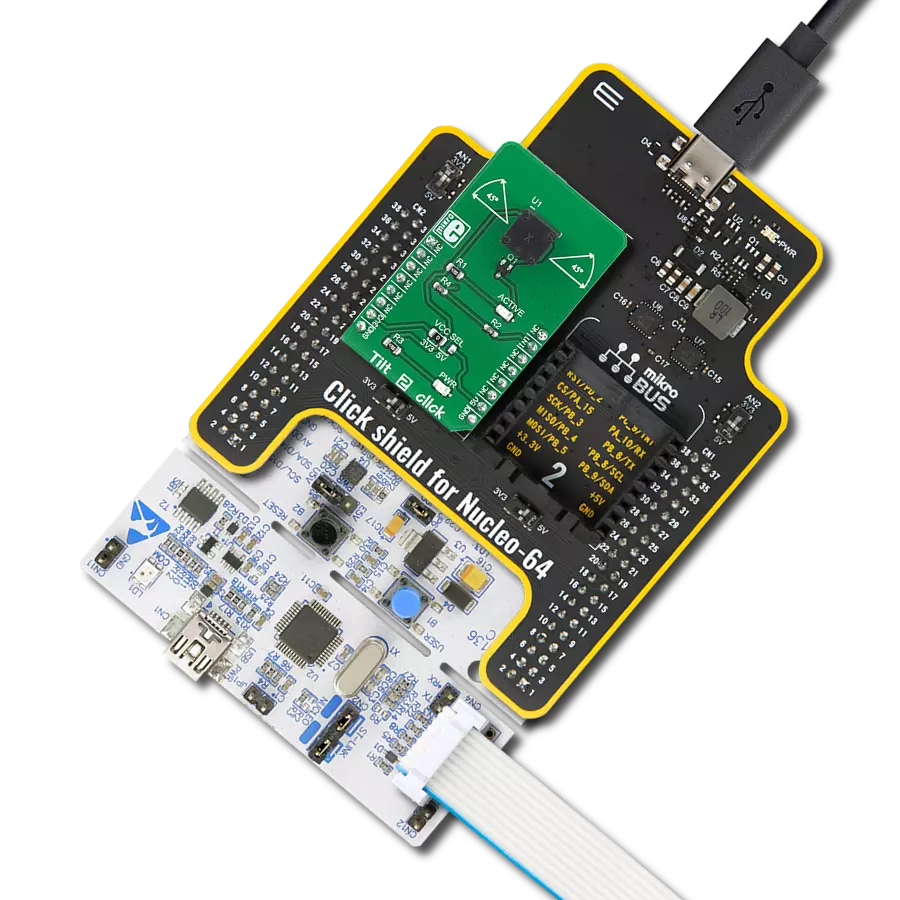
6DOF IMU 20 Click
Dev. board
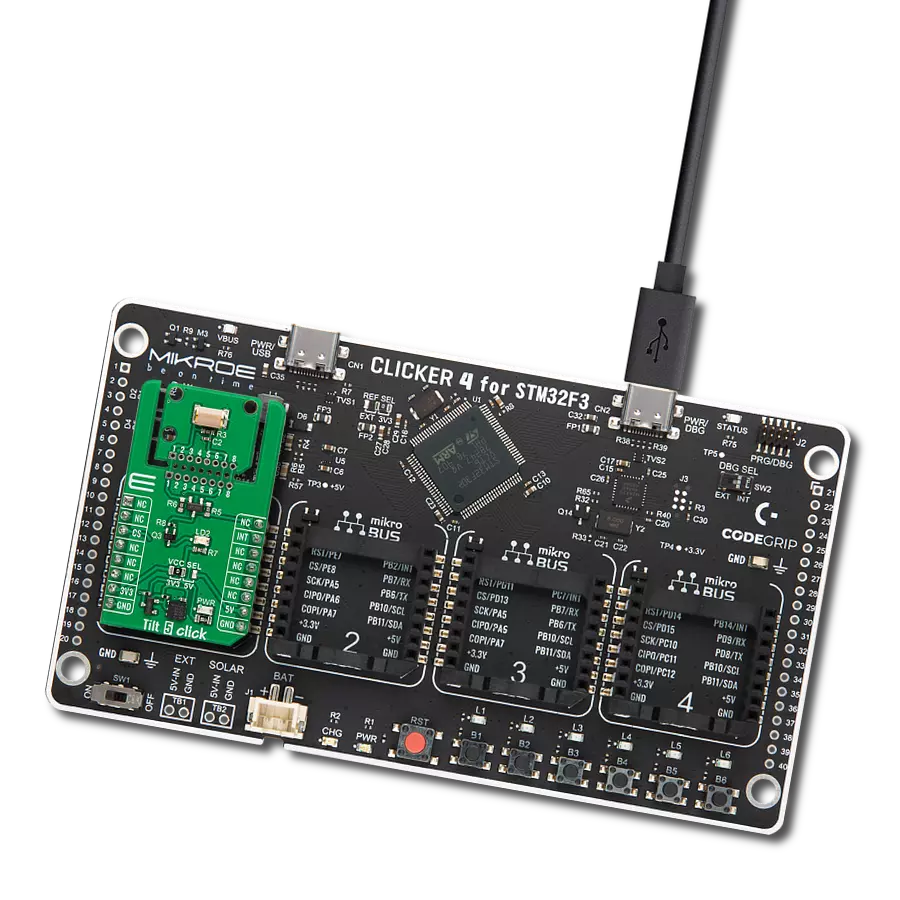
Clicker 4 for STM32
Compiler
NECTO Studio
MCU
STM32F767BI
Explore new realms of motion control and orientation sensing for applications where precision is paramount
A
A
Hardware Overview
How does it work?
6DOF IMU 20 Click is based on the BMI323, a versatile 6DoF (six degrees of freedom) sensor module from Bosch Sensortec. This IMU combines precise acceleration and angular rate (gyroscopic) measurement with intelligent integrated features triggered by motion. It also has a 2K-byte FIFO that can lower the traffic on the selected serial bus interface by allowing the system processor to burst read sensor data. The BMI323 provides improved accelerometer performance as well as lower power consumption. In high-performance mode, using both the gyroscope and the accelerometer, the BMI323 shows a significant reduction in power consumption of nearly 15% compared to its predecessor, the BMI160. The BMI323 supports various use cases, allowing customers to design it into various applications like angle and position detection, motion detection, tap recognition, and more. The BMI323
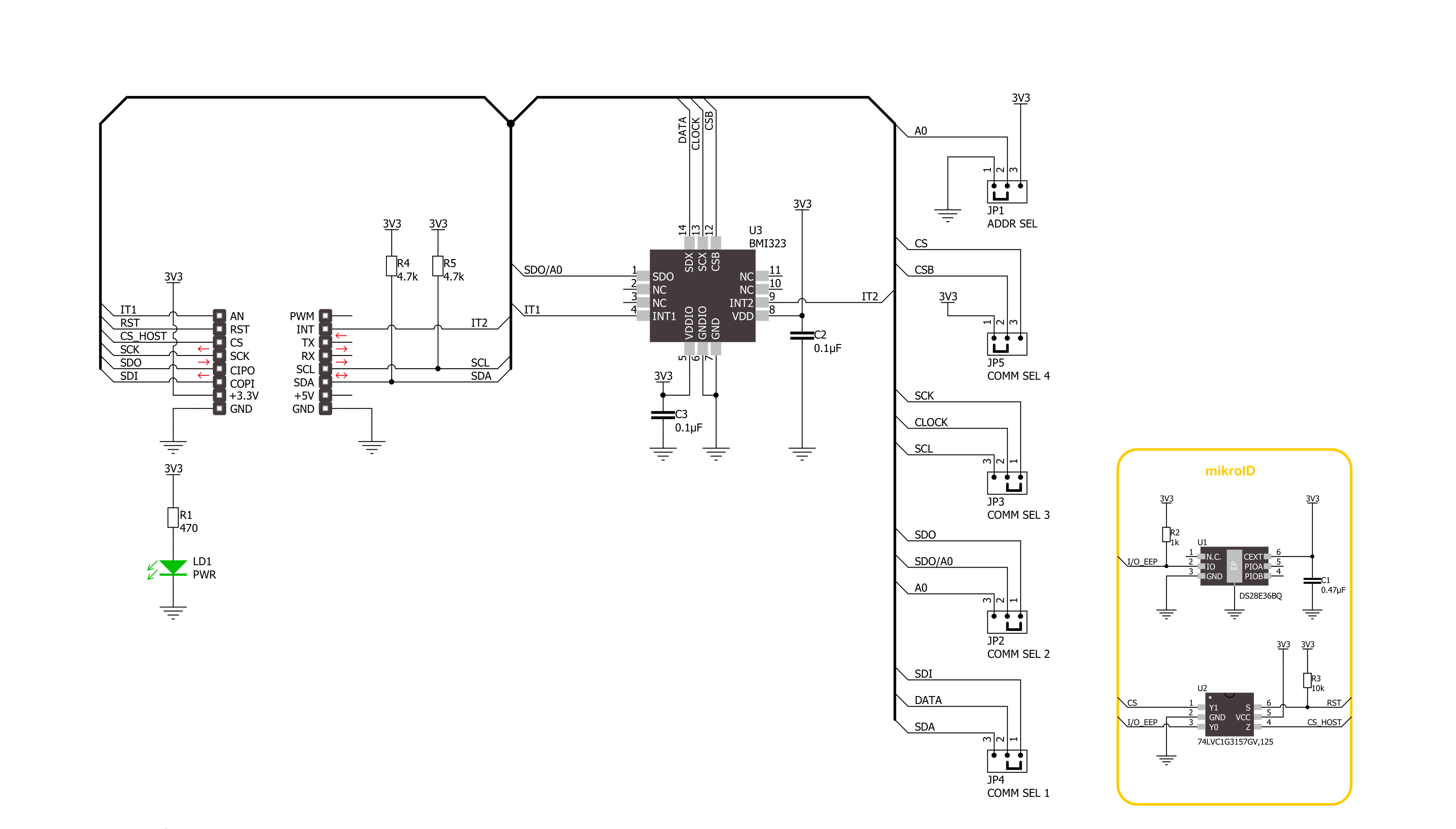
comprises a 16-bit triaxial gyroscope, a 16-bit triaxial accelerometer, and a 16-bit digital temperature sensor in a single package. The accelerometer measures the direction and magnitude of the force applied to the sensor. In a free fall scenario, an accelerometer will report a vector of zeros. The gyroscope measures the rotational rate and reports vector zeros when the device rests. The gyroscope supports full-scale range settings from ±125dps to ±2000dps, and the accelerometer supports range settings from ±2g to ±16g. In addition, the BMI323 also includes an auxiliary temperature sensor. This Click board™ allows the use of both I2C and SPI interfaces at a maximum frequency of 1MHz for I2C and 10MHz for SPI communication. Selection is made by positioning SMD jumpers marked COMM SEL to the appropriate position. All jumpers must be on the same side, or the Click board™ may become
unresponsive. When the I2C interface is selected, the BMI323 allows the choice of its I2C slave address, using the ADDR SEL SMD jumper set to an appropriate position marked 1 or 0. In addition to communication pins, this board also possesses two interrupts, IT1 and IT2, routed to, where by default, the AN and INT pins stand on the mikroBUS™ socket, entirely programmed by the user through a serial interface. They signal MCU that a motion event has been sensed. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. Also, it comes equipped with a library containing functions and an example code that can be used as a reference for further development.


Features overview
Development board
Clicker 4 for STM32 is a compact development board designed as a complete solution that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit ARM Cortex-M4 microcontroller, the STM32F767BI from STMicroelectronics, four mikroBUS™ sockets for Click board™ connectivity, a USB connector, LED indicators, buttons, a debugger/programmer connector, two 23-pin headers for interfacing with external electronics, and more. Thanks to innovative manufacturing technology, it allows you to build gadgets with
unique functionalities and features quickly. Each part of the Clicker 4 for STM32 development kit contains the components necessary for the most efficient operation of the same board. In addition to the possibility of choosing the Clicker 4 for STM32 programming method, using an external CODEGRIP or mikroProg programmer connected to the onboard JTAG/SWD header, the Clicker 4 board also includes a clean and regulated power supply block. It provides several ways of board-powering; through the USB Type-C (USB-C) connector using a power supply delivered by the USB HOST (i.e., personal computer), USB wall
adapter, or a Li-Po/Li-Ion battery via an onboard battery connector. All communication methods that mikroBUS™ itself supports are on this board (plus USB-DEVICE), including the well-established mikroBUS™ socket, several user-configurable buttons, and LED indicators. Clicker 4 for STM32 is an integral part of the Mikroe ecosystem, allowing you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M7
MCU Memory (KB)
2048
Silicon Vendor
STMicroelectronics
Pin count
208
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
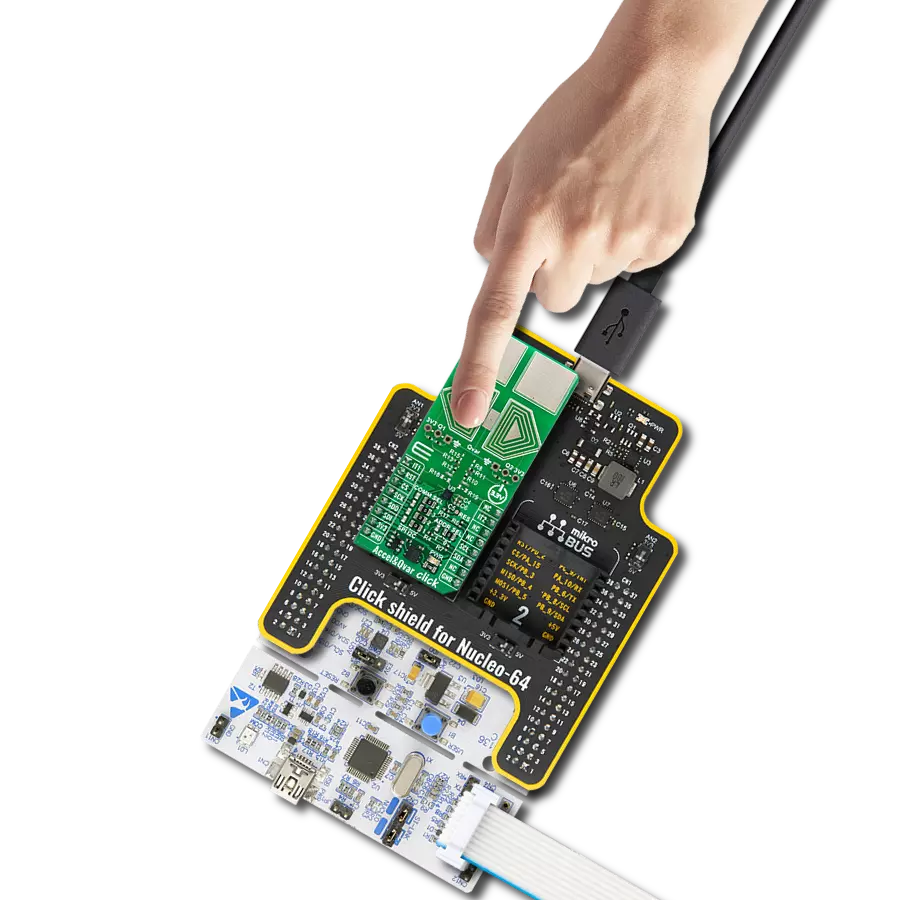
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Clicker 4 for STM32 as your development board.













Software Support
Library Description
This library contains API for 6DOF IMU 20 Click driver.
Key functions:
c6dofimu20_get_gyr_data- 6DOF IMU 20 gyro data reading functionc6dofimu20_get_temperature- 6DOF IMU 20 temperature reading functionc6dofimu20_sw_reset- 6DOF IMU 20 software reset function
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief 6DOF IMU 20 Click example
*
* # Description
* This library contains API for 6DOF IMU 20 Click driver.
* The library initializes and defines the I2C and SPI bus drivers to
* write and read data from registers, as well as the default
* configuration for reading gyroscope and accelerator data, and temperature.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver after that resets the device and
* performs default configuration and reads the device id.
*
* ## Application Task
* This example demonstrates the use of the 6DOF IMU 20 Click board by
* measuring and displaying acceleration and gyroscope data for X-axis,
* Y-axis, and Z-axis as well as temperature in degrees Celsius.
*
* @author Stefan Ilic
*
*/
#include "board.h"
#include "log.h"
#include "c6dofimu20.h"
static c6dofimu20_t c6dofimu20;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
c6dofimu20_cfg_t c6dofimu20_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
c6dofimu20_cfg_setup( &c6dofimu20_cfg );
C6DOFIMU20_MAP_MIKROBUS( c6dofimu20_cfg, MIKROBUS_1 );
err_t init_flag = c6dofimu20_init( &c6dofimu20, &c6dofimu20_cfg );
if ( ( I2C_MASTER_ERROR == init_flag ) || ( SPI_MASTER_ERROR == init_flag ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
uint8_t chip_id;
c6dofimu20_get_id( &c6dofimu20, &chip_id );
if ( C6DOFIMU20_CHIP_ID != chip_id )
{
log_error( &logger, " Communication error." );
for ( ; ; );
}
if ( C6DOFIMU20_ERROR == c6dofimu20_default_cfg ( &c6dofimu20 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
c6dofimu20_data_t accel_data;
c6dofimu20_data_t gyro_data;
uint16_t data_rdy;
float temperature;
c6dofimu20_get_reg( &c6dofimu20, C6DOFIMU20_REG_STATUS, &data_rdy );
if ( C6DOFIMU20_STATUS_DRDY_ACC_FLAG & data_rdy )
{
c6dofimu20_get_acc_data( &c6dofimu20, &accel_data );
log_printf( &logger, " Accel: X: %d, Y: %d, Z: %d \r\n", accel_data.data_x, accel_data.data_y, accel_data.data_z );
}
if ( C6DOFIMU20_STATUS_DRDY_GYR_FLAG & data_rdy )
{
c6dofimu20_get_gyr_data( &c6dofimu20, &gyro_data );
log_printf( &logger, " Gyro: X: %d, Y: %d, Z: %d \r\n", gyro_data.data_x, gyro_data.data_y, gyro_data.data_z );
}
if ( C6DOFIMU20_STATUS_DRDY_TEMP_FLAG & data_rdy )
{
c6dofimu20_get_temperature( &c6dofimu20, &temperature );
log_printf( &logger, " Temperature: %.2f degC \r\n", temperature );
}
log_printf( &logger, " - - - - - - - - - - - - - - - - - - - - - - - - \r\n" );
Delay_ms ( 500 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Motion