Detect the presence or lack of motion with ADXL345 and PIC32MZ2048EFH100
Measure acceleration in three different directions

Published Jun 18, 2023
Click board™
Accel Click
Dev. board
Flip&Click PIC32MZ
Compiler
NECTO Studio
MCU
PIC32MZ2048EFH100
Enhance your projects with accurate motion detection, capturing its speed and direction with precision
A
A
Hardware Overview
How does it work?
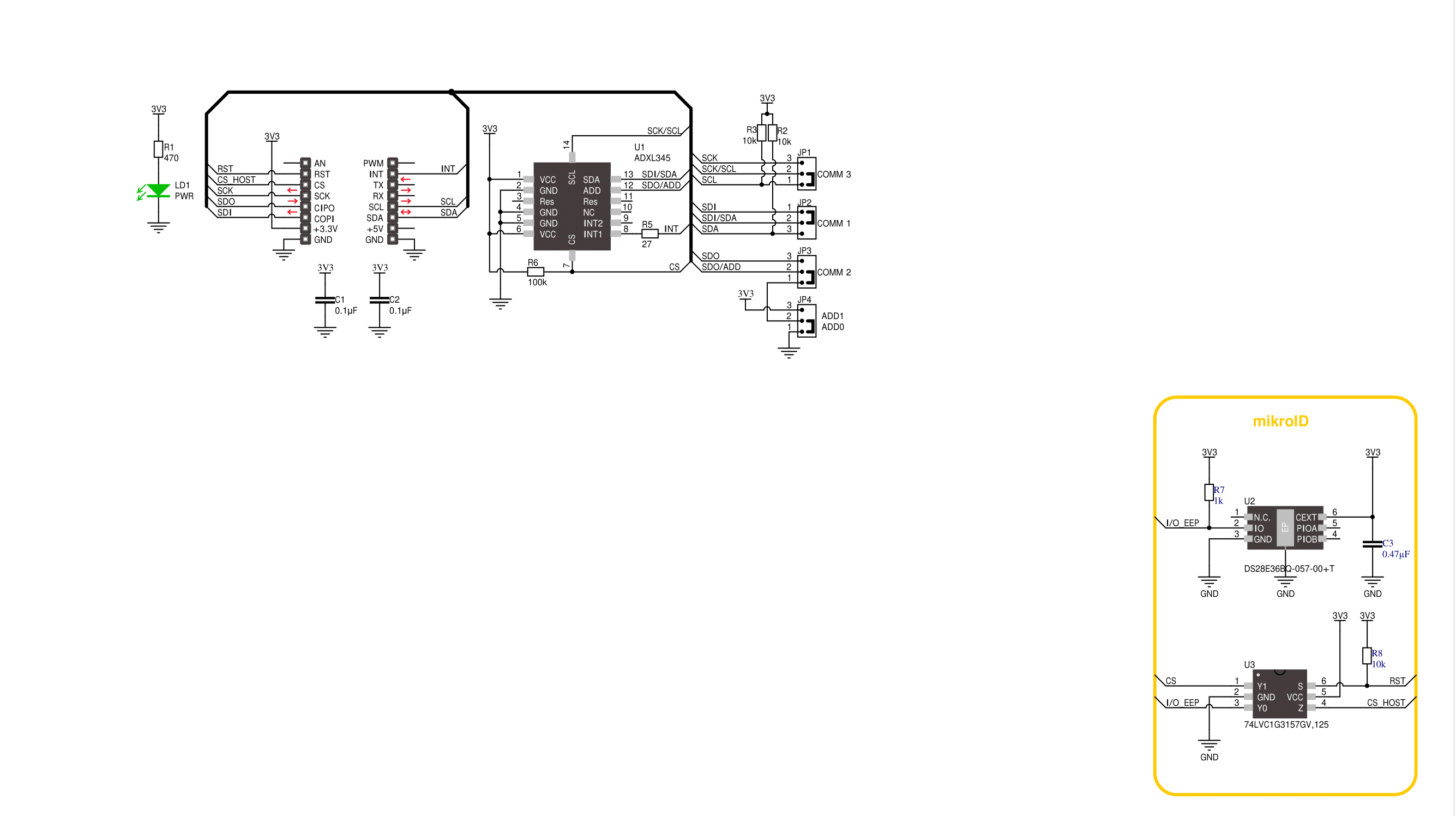
Accel Click is based on the ADXL345, a complete 3-axis acceleration measurement system that operates at low power consumption levels from Analog Devices. It measures both dynamic accelerations, resulting from motion or shock, and static acceleration, such as gravity, and allows selectable full-scale acceleration measurements in ranges of ±2g, ±4g, ±8g, or ±16g with a resolution of 4mg/LSB on the ±2g range. Acceleration is reported digitally, communicating via the SPI or the I2C protocol and providing 16-bit output resolution. Its high resolution also enables the measurement of inclination changes less than 1.0°. The ADXL345 supports several special sensing functions. Activity and inactivity sensing detect the presence or lack
of motion by comparing the acceleration on any axis with user-set thresholds, while tap sensing detects single and double taps in any direction. Besides, a free-fall sensing feature detects if the device is falling. All these functions can be mapped to the interrupt pin routed on the INT pin of the mikroBUS™ socket. Accel Click allows the use of both I2C and SPI interfaces. The selection can be made by positioning SMD jumpers labeled as COMM SEL in an appropriate position. Note that all the jumpers' positions must be on the same side, or the Click board™ may become unresponsive. While the I2C interface is selected, the ADXL345 allows choosing the least significant bit (LSB) of its I2C slave address using the SMD jumper labeled ADDR
SEL. An integrated memory management system with a 32-level first in, first out (FIFO) buffer can store data to minimize host processor activity and lower overall system power consumption. Low power modes enable intelligent motion-based power management with threshold sensing and active acceleration measurement at low power dissipation. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. Also, it comes equipped with a library containing functions and an example code that can be used as a reference for further development.

Features overview
Development board
Flip&Click PIC32MZ is a compact development board designed as a complete solution that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit PIC32MZ microcontroller, the PIC32MZ2048EFH100 from Microchip, four mikroBUS™ sockets for Click board™ connectivity, two USB connectors, LED indicators, buttons, debugger/programmer connectors, and two headers compatible with Arduino-UNO pinout. Thanks to innovative manufacturing technology,
it allows you to build gadgets with unique functionalities and features quickly. Each part of the Flip&Click PIC32MZ development kit contains the components necessary for the most efficient operation of the same board. In addition, there is the possibility of choosing the Flip&Click PIC32MZ programming method, using the chipKIT bootloader (Arduino-style development environment) or our USB HID bootloader using mikroC, mikroBasic, and mikroPascal for PIC32. This kit includes a clean and regulated power supply block through the USB Type-C (USB-C) connector. All communication
methods that mikroBUS™ itself supports are on this board, including the well-established mikroBUS™ socket, user-configurable buttons, and LED indicators. Flip&Click PIC32MZ development kit allows you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Flip&Click PIC32MZ as your development board.













Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for Accel Click driver.
Key functions:
accel_read_x_axis- This function reads X axis value from Accelaccel_read_y_axis- This function reads Y axis value from Accelaccel_read_z_axis- This function reads Z axis value from Accel
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief Accel Click example
*
* # Description
* This example demonstrates the use of Accel Click board by reading and
* displaying the accelerometer data (X, Y, and Z axis).
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes SPI/I2C driver and settings data read format,
* power mode, FIFO control and baud rate ( 100Hz default ).
*
* ## Application Task
* Reads X, Y and Z axis and logs on usbuart every 100 ms.
*
* \author Jovan Stajkovic
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "accel.h"
// ------------------------------------------------------------------ VARIABLES
static accel_t accel;
static log_t logger;
static uint8_t tmp;
static int16_t val_x;
static int16_t val_y;
static int16_t val_z;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
accel_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
accel_cfg_setup( &cfg );
ACCEL_MAP_MIKROBUS( cfg, MIKROBUS_1 );
accel_init( &accel, &cfg );
accel_generic_read( &accel, ACCEL_REG_DEVID, &tmp, 1 );
if ( tmp == ACCEL_DEVID )
{
log_printf( &logger, "---- Comunication OK!!! ----\r\n" );
}
else
{
log_printf( &logger, "---- Comunication ERROR!!! ----\r\n" );
for ( ; ; );
}
accel_default_cfg ( &accel );
}
void application_task ( void )
{
val_x = accel_read_x_axis( &accel );
log_printf( &logger, "Axis X : %.3f g\r\n", val_x / ACCEL_DATA_RES_LSB_PER_G );
val_y = accel_read_y_axis( &accel );
log_printf( &logger, "Axis Y : %.3f g\r\n", val_y / ACCEL_DATA_RES_LSB_PER_G );
val_z = accel_read_z_axis( &accel );
log_printf( &logger, "Axis Z : %.3f g\r\n", val_z / ACCEL_DATA_RES_LSB_PER_G );
log_printf( &logger, "-------------------\r\n" );
Delay_ms ( 100 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Motion