Design ultimate multiprotocol OBD solution with STN1110 and PIC32MZ2048EFH100
Revolutionize vehicle diagnostics

Published Aug 03, 2023
Click board™
OBDII Click
Dev. board
Flip&Click PIC32MZ
Compiler
NECTO Studio
MCU
PIC32MZ2048EFH100
Innovative multiprotocol OBD-to-UART interface solution for seamless ECU communication, supporting multiple protocols and delivering vital data efficiently
A
A
Hardware Overview
How does it work?
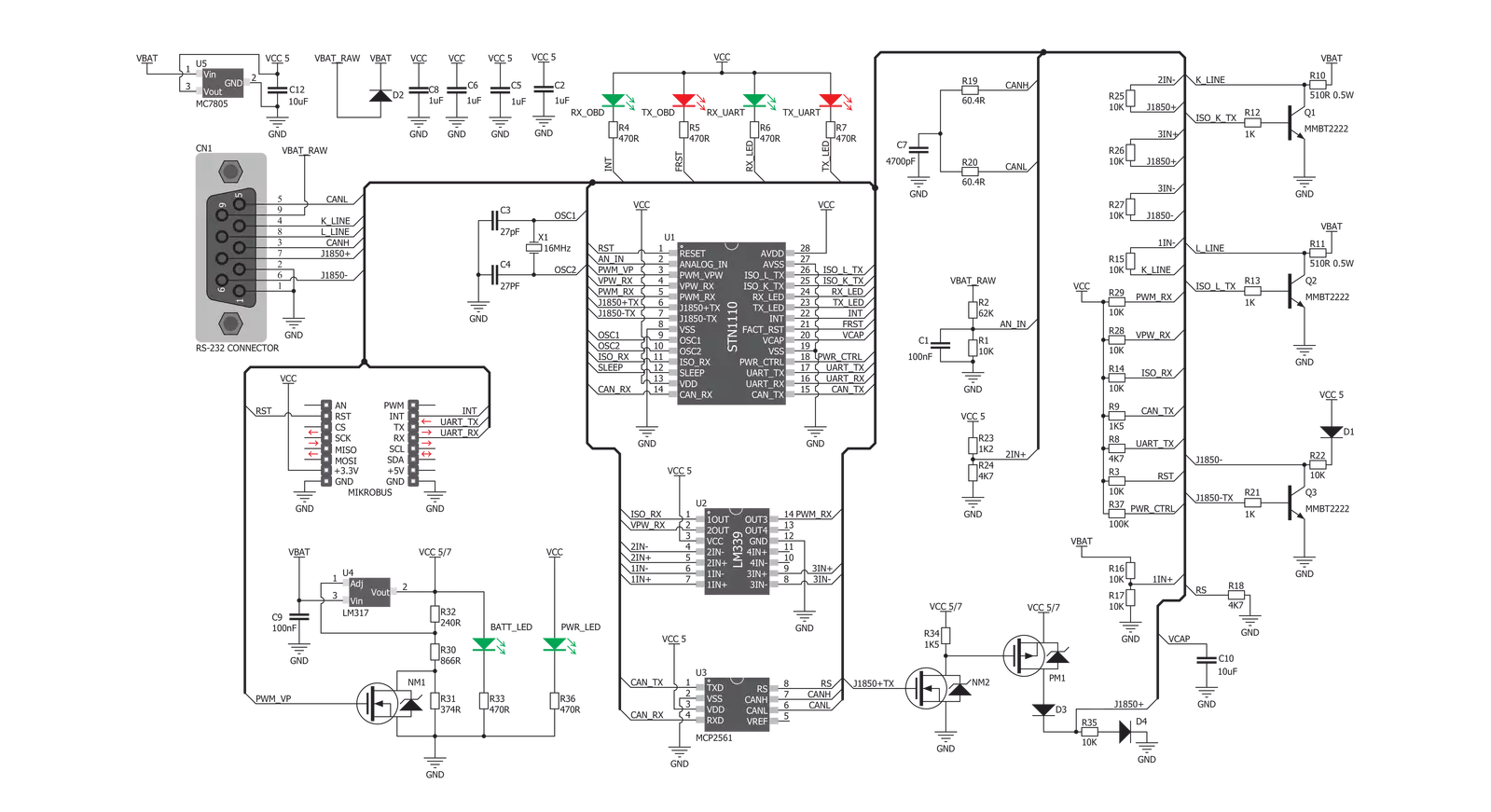
OBDII Click is based on the STN1110, a multiprotocol OBD to UART interface solution from ScanTool. This Click can be used for communication with the Electronic Control Unit (ECU) of a vehicle via several different OBD II diagnostic protocols such as CAN, K LINE, L LINE, and J1850. The STN1110 IC is used to process requests the MCU sends via the UART interface and return the responses from the ECU network nodes. The STN1110 multiprotocol OBD to UART IC is built around a fast 16-bit processor core with a large memory buffer. It also features automatic
protocol recognition, fully compatible with the ELM327 and ELM327 extended AT command set and can be used on UART speed up to 10Mbps. Those features make this click more than a perfect solution for various designs, including custom car dashboards, OBD data loggers, automotive diagnostic scan tools, and similar applications. To achieve successful communication with various systems used inside the vehicle diagnostic network, the STN1110 needs the signals to be converted on a physical level. For this reason, this board also comes equipped with the MCP2561 - an
ISO-11898 standard compliant CAN signal transceiver, as well as the LM339 - quad differential comparator IC, that is used to convert K Line, L Line, and J1850 line signals into a proper digital format. A separate analog pin is available on the STN1110 IC, which is used for the car battery voltage measurement. This function is handy when checking communication on the UART side of the IC. Besides requesting the voltage level information from the ECU via the command, it can also be measured directly from the battery voltage divider, with no special communication used.

Features overview
Development board
Flip&Click PIC32MZ is a compact development board designed as a complete solution that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit PIC32MZ microcontroller, the PIC32MZ2048EFH100 from Microchip, four mikroBUS™ sockets for Click board™ connectivity, two USB connectors, LED indicators, buttons, debugger/programmer connectors, and two headers compatible with Arduino-UNO pinout. Thanks to innovative manufacturing technology,
it allows you to build gadgets with unique functionalities and features quickly. Each part of the Flip&Click PIC32MZ development kit contains the components necessary for the most efficient operation of the same board. In addition, there is the possibility of choosing the Flip&Click PIC32MZ programming method, using the chipKIT bootloader (Arduino-style development environment) or our USB HID bootloader using mikroC, mikroBasic, and mikroPascal for PIC32. This kit includes a clean and regulated power supply block through the USB Type-C (USB-C) connector. All communication
methods that mikroBUS™ itself supports are on this board, including the well-established mikroBUS™ socket, user-configurable buttons, and LED indicators. Flip&Click PIC32MZ development kit allows you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
You complete me!
Accessories
DB9 Cable Female-to-Female (2m) cable is essential for establishing dependable serial data connections between devices. With its DB9 female connectors on both ends, this cable enables a seamless link between various equipment, such as computers, routers, switches, and other serial devices. Measuring 2 meters in length, it offers flexibility in arranging your setup without compromising data transmission quality. Crafted with precision, this cable ensures consistent and reliable data exchange, making it suitable for industrial applications, office environments, and home setups. Whether configuring networking equipment, accessing console ports, or utilizing serial peripherals, this cable's durable construction and robust connectors guarantee a stable connection. Simplify your data communication needs with the 2m DB9 female-to-female cable, an efficient solution designed to meet your serial connectivity requirements easily and efficiently.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Flip&Click PIC32MZ as your development board.














Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for OBDII Click driver.
Key functions:
obdii_send_command- This function sends command string by using UART serial interfaceobdii_generic_read- This function reads a desired number of data bytes by using UART serial interfaceobdii_reset_device- This function resets the device by toggling the RST pin
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief OBDII Click Example.
*
* # Description
* This example demonstrates the use of OBDII Click board by reading the engine RPM
* and vehicle speed and displaying results on the USB UART.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and performs the Click default configuration.
*
* ## Application Task
* Reads and processes the engine RPM and vehicle speed and displays the results
* on the USB UART once per second.
*
* ## Additional Function
* - static void obdii_clear_app_buf ( void )
* - static err_t obdii_process ( obdii_t *ctx )
* - static void obdii_log_app_buf ( void )
* - static err_t obdii_rsp_check ( obdii_t *ctx, uint8_t *rsp )
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "obdii.h"
#include "conversions.h"
#define PROCESS_BUFFER_SIZE 200
static obdii_t obdii;
static log_t logger;
static uint8_t app_buf[ PROCESS_BUFFER_SIZE ] = { 0 };
static int32_t app_buf_len = 0;
/**
* @brief OBDII clearing application buffer.
* @details This function clears memory of application buffer and reset its length.
* @note None.
*/
static void obdii_clear_app_buf ( void );
/**
* @brief OBDII data reading function.
* @details This function reads data from device and concatenates data to application buffer.
* @param[in] ctx : Click context object.
* See #obdii_t object definition for detailed explanation.
* @return @li @c 0 - Read some data.
* @li @c -1 - Nothing is read.
* See #err_t definition for detailed explanation.
* @note None.
*/
static err_t obdii_process ( obdii_t *ctx );
/**
* @brief Logs application buffer.
* @details This function logs data from application buffer.
*/
static void obdii_log_app_buf ( void );
/**
* @brief Response check.
* @details This function checks for response and
* returns the status of response.
* @param[in] ctx : Click context object.
* See #obdii_t object definition for detailed explanation.
* @param[in] rsp Expected response.
* @return @li @c 0 - OK response.
* @li @c -1 - Unknown command.
* @li @c -2 - Timeout error.
* See #err_t definition for detailed explanation.
*/
static err_t obdii_rsp_check ( obdii_t *ctx, uint8_t *rsp );
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
obdii_cfg_t obdii_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
obdii_cfg_setup( &obdii_cfg );
OBDII_MAP_MIKROBUS( obdii_cfg, MIKROBUS_1 );
if ( UART_ERROR == obdii_init( &obdii, &obdii_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
obdii_reset_device ( &obdii );
obdii_process ( &obdii );
obdii_clear_app_buf ( );
log_printf( &logger, "> Reset device\r\n" );
obdii_send_command ( &obdii, OBDII_CMD_RESET_DEVICE );
obdii_rsp_check ( &obdii, OBDII_RSP_PROMPT );
obdii_log_app_buf ( );
Delay_ms ( 1000 );
log_printf( &logger, " Disable echo\r\n" );
obdii_send_command ( &obdii, OBDII_CMD_DISABLE_ECHO );
obdii_rsp_check ( &obdii, OBDII_RSP_PROMPT );
obdii_log_app_buf ( );
log_printf( &logger, " Remove spaces\r\n" );
obdii_send_command ( &obdii, OBDII_CMD_SPACES_OFF );
obdii_rsp_check ( &obdii, OBDII_RSP_PROMPT );
obdii_log_app_buf ( );
}
void application_task ( void )
{
uint8_t * __generic_ptr start_ptr = NULL;
uint8_t data_buf[ 5 ] = { 0 };
uint16_t rpm = 0;
uint8_t speed = 0;
log_printf( &logger, " Get current RPM\r\n" );
obdii_send_command ( &obdii, OBDII_CMD_GET_CURRENT_RPM );
obdii_rsp_check ( &obdii, OBDII_RSP_PROMPT );
start_ptr = strstr( app_buf, OBDII_RSP_CURRENT_RPM );
if ( start_ptr )
{
memcpy ( data_buf, ( start_ptr + 4 ), 4 );
data_buf[ 4 ] = 0;
rpm = hex_to_uint16( data_buf ) / 4;
log_printf( &logger, "RPM: %u\r\n\n>", rpm );
}
else
{
obdii_log_app_buf ( );
}
log_printf( &logger, " Get current speed\r\n" );
obdii_send_command ( &obdii, OBDII_CMD_GET_CURRENT_SPEED );
obdii_rsp_check ( &obdii, OBDII_RSP_PROMPT );
start_ptr = strstr( app_buf, OBDII_RSP_CURRENT_SPEED );
if ( start_ptr )
{
memcpy ( data_buf, ( start_ptr + 4 ), 2 );
data_buf[ 2 ] = 0;
speed = hex_to_uint8( data_buf );
log_printf( &logger, "Speed: %u km/h\r\n\n>", ( uint16_t ) speed );
}
else
{
obdii_log_app_buf ( );
}
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
static void obdii_clear_app_buf ( void )
{
memset( app_buf, 0, app_buf_len );
app_buf_len = 0;
}
static err_t obdii_process ( obdii_t *ctx )
{
uint8_t rx_buf[ PROCESS_BUFFER_SIZE ] = { 0 };
int32_t rx_size = 0;
rx_size = obdii_generic_read( ctx, rx_buf, PROCESS_BUFFER_SIZE );
if ( rx_size > 0 )
{
int32_t buf_cnt = app_buf_len;
if ( ( ( app_buf_len + rx_size ) > PROCESS_BUFFER_SIZE ) && ( app_buf_len > 0 ) )
{
buf_cnt = PROCESS_BUFFER_SIZE - ( ( app_buf_len + rx_size ) - PROCESS_BUFFER_SIZE );
memmove ( app_buf, &app_buf[ PROCESS_BUFFER_SIZE - buf_cnt ], buf_cnt );
}
for ( int32_t rx_cnt = 0; rx_cnt < rx_size; rx_cnt++ )
{
if ( rx_buf[ rx_cnt ] )
{
app_buf[ buf_cnt++ ] = rx_buf[ rx_cnt ];
if ( app_buf_len < PROCESS_BUFFER_SIZE )
{
app_buf_len++;
}
}
}
return OBDII_OK;
}
return OBDII_ERROR;
}
static void obdii_log_app_buf ( void )
{
for ( int32_t buf_cnt = 0; buf_cnt < app_buf_len; buf_cnt++ )
{
log_printf( &logger, "%c", app_buf[ buf_cnt ] );
}
}
static err_t obdii_rsp_check ( obdii_t *ctx, uint8_t *rsp )
{
uint32_t timeout_cnt = 0;
uint32_t timeout = 60000;
obdii_clear_app_buf( );
obdii_process( ctx );
while ( 0 == strstr( app_buf, rsp ) )
{
obdii_process( ctx );
if ( timeout_cnt++ > timeout )
{
obdii_clear_app_buf( );
return OBDII_ERROR_TIMEOUT;
}
Delay_ms ( 1 );
}
Delay_ms ( 100 );
obdii_process( ctx );
if ( strstr( app_buf, rsp ) )
{
return OBDII_OK;
}
return OBDII_ERROR;
}
// ------------------------------------------------------------------------ END