Upgrade your audio equipment with PCM5142 and PIC32MZ2048EFM100
Experience sound at its best

Published Oct 23, 2023
Click board™
Audio DAC Click
Dev. board
Curiosity PIC32 MZ EF
Compiler
NECTO Studio
MCU
PIC32MZ2048EFM100
Elevate your audio quality by converting sound into a premium analog signal, ensuring an exceptional audio playback experience
A
A
Hardware Overview
How does it work?
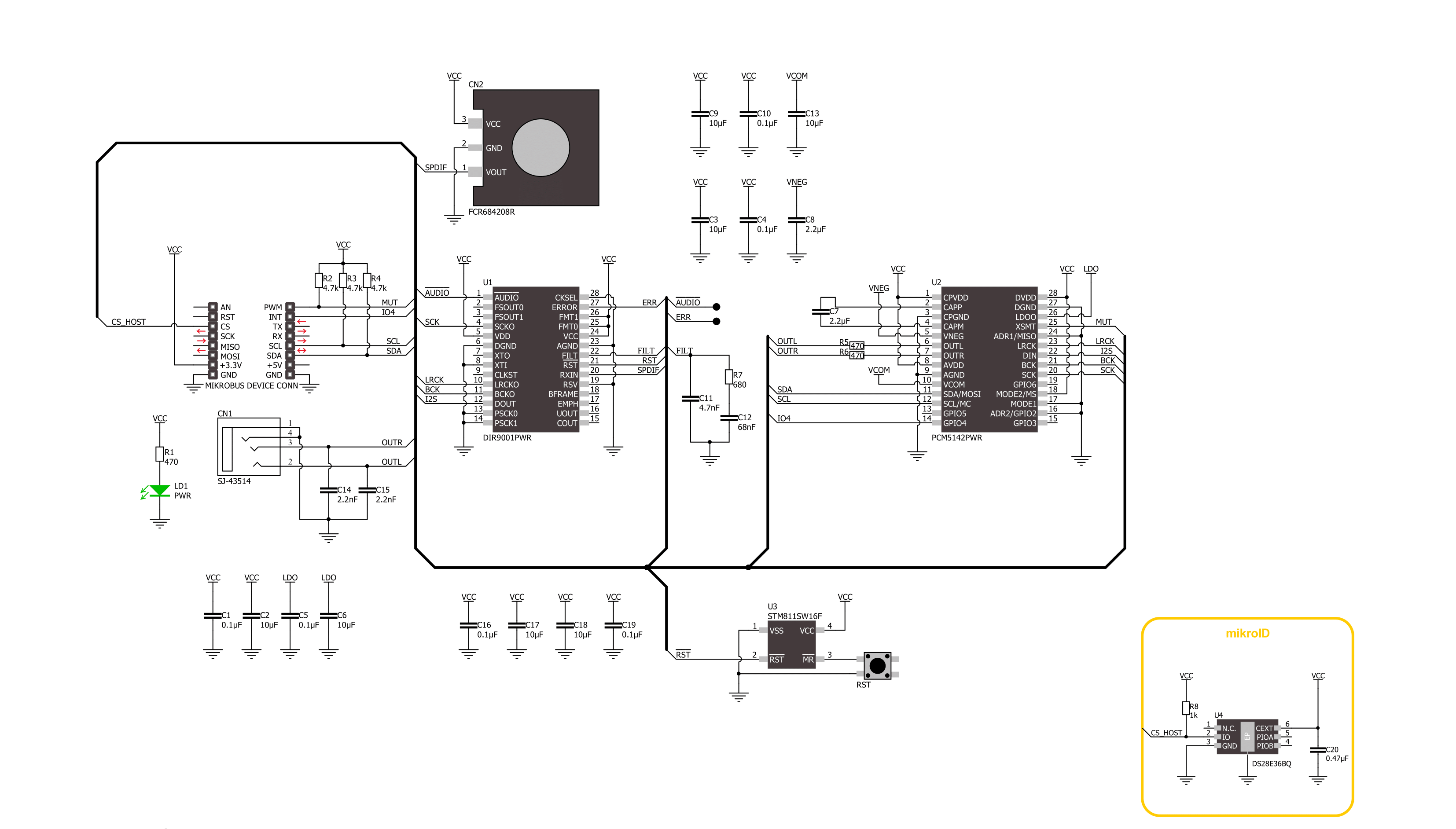
Audio DAC Click is based on a combination of DIR9001 and PCM5142, a digital audio interface receiver and audio stereo DAC from Texas Instruments, suitable for upgrading your audio equipment. The DIR9001 audio receiver can accept signals up to a 108kHz sampling rate at the highest, 24-bit data word, biphase-encoded signal, and complies with the jitter specification IEC60958-3, JEITA CPR1205 (Revised version of EIAJ CP-1201), AES3, and EBUtech3250. These signals are brought to the DIR9001 via an onboard fiber optic S/PDIF connector, better known as Sony/Philips digital interface format, a digital audio interface often used in consumer audio equipment. After receiving the signals, the DIR9001 forwards them for further processing by the stereo audio DAC, the PCM5142, also from Texas Instruments. The PCM5142 has a fully programmable miniDSP core, allowing developers
to integrate filters, dynamic range controls, custom interpolators, and other differentiating features into their applications. It uses the latest generation of TI's advanced segment-DAC architecture to achieve excellent dynamic performance, detailed heights, and an exceptionally good sound stage. Compared with existing DAC technology, the PCM5142 offers up to 20dB lower out-of-band noise, reducing EMI and aliasing in downstream amplifiers/ADCs, and accepts industry-standard audio data formats with 16- to 32-bit data and sample rates up to 384kHz. After stereo DAC processing, the output audio signal is available to users for further use on the 3.5mm-line output audio jack, making it suitable for various multimedia systems, satellite radio, CD and DVD players, and more. The PCM5142 communicates with MCU using the standard I2C 2-Wire data transmission protocol
that supports Standard-Mode (100 kHz) and Fast-Mode (400 kHz) operations. In addition to communication pins, this board has several additional functions, providing users with application flexibility. Besides the I2C signals, the mikroBUS™ also has an auto-mute function routed to the MUT pin on the mikroBUS™ socket to mute the device upon intentional or unintentional power loss, as well as one user-configurable general-purpose pin, the IO4 pin of the mikroBUS™ socket. The onboard button labeled as RST can reset the DIR9001 audio receiver. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. Also, it comes equipped with a library containing functions and an example code that can be used as a reference for further development.

Features overview
Development board
Curiosity PIC32 MZ EF development board is a fully integrated 32-bit development platform featuring the high-performance PIC32MZ EF Series (PIC32MZ2048EFM) that has a 2MB Flash, 512KB RAM, integrated FPU, Crypto accelerator, and excellent connectivity options. It includes an integrated programmer and debugger, requiring no additional hardware. Users can expand
functionality through MIKROE mikroBUS™ Click™ adapter boards, add Ethernet connectivity with the Microchip PHY daughter board, add WiFi connectivity capability using the Microchip expansions boards, and add audio input and output capability with Microchip audio daughter boards. These boards are fully integrated into PIC32’s powerful software framework, MPLAB Harmony,
which provides a flexible and modular interface to application development a rich set of inter-operable software stacks (TCP-IP, USB), and easy-to-use features. The Curiosity PIC32 MZ EF development board offers expansion capabilities making it an excellent choice for a rapid prototyping board in Connectivity, IOT, and general-purpose applications.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Curiosity PIC32 MZ EF as your development board.














Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for Audio DAC Click driver.
Key functions:
audiodac_get_gpio4_pin- This function returns the GPIO4 pin logic state. The GPIO4 pin is mapped to auto mute flag output for both L and R channels by defaultaudiodac_volume_control- This function sets the volume level for the selected output channel
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief Audio DAC Click example
*
* # Description
* This example demonstrates the use of Audio DAC Click board by controling the volume
* level of both output channels.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and performs the Click default configuration.
*
* ## Application Task
* Checks if the auto mute flag is set and then changes the volume level of both output channels
* every 100ms. All data is being displayed on the USB UART where you can track the program flow.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "audiodac.h"
static audiodac_t audiodac;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
audiodac_cfg_t audiodac_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
audiodac_cfg_setup( &audiodac_cfg );
AUDIODAC_MAP_MIKROBUS( audiodac_cfg, MIKROBUS_1 );
if ( I2C_MASTER_ERROR == audiodac_init( &audiodac, &audiodac_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( AUDIODAC_ERROR == audiodac_default_cfg ( &audiodac ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
static uint8_t volume = AUDIODAC_VOLUME_MUTE;
if ( audiodac_get_gpio4_pin ( &audiodac ) )
{
log_printf ( &logger, " Auto mute flag (both L and R channels are auto muted)\r\n" );
// Wait until the channels are auto unmuted, i.e. until a valid digital signal is received
while ( audiodac_get_gpio4_pin ( &audiodac ) );
}
if ( AUDIODAC_OK == audiodac_volume_control ( &audiodac, AUDIODAC_CHANNEL_BOTH, volume ) )
{
log_printf ( &logger, "\r\n Volume: " );
if ( AUDIODAC_VOLUME_MUTE == volume )
{
log_printf ( &logger, "MUTE\r\n" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
else if ( AUDIODAC_VOLUME_MAX == volume )
{
log_printf ( &logger, "MAX\r\n" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
else
{
log_printf ( &logger, "%u\r\n", ( uint16_t ) volume );
Delay_ms ( 100 );
}
volume++;
if ( volume > AUDIODAC_VOLUME_MAX )
{
volume = AUDIODAC_VOLUME_MUTE;
}
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END