Read and decode barcodes quickly and accurately with EM3080-W and PIC32MZ2048EFM100
Simplify inventory control and asset tracking

Published Oct 02, 2023
Click board™
Barcode 2 Click
Dev. board
Curiosity PIC32 MZ EF
Compiler
NECTO Studio
MCU
PIC32MZ2048EFM100
Experience the future of data capture with our barcode scanner, where precision and speed drive operational excellence
A
A
Hardware Overview
How does it work?
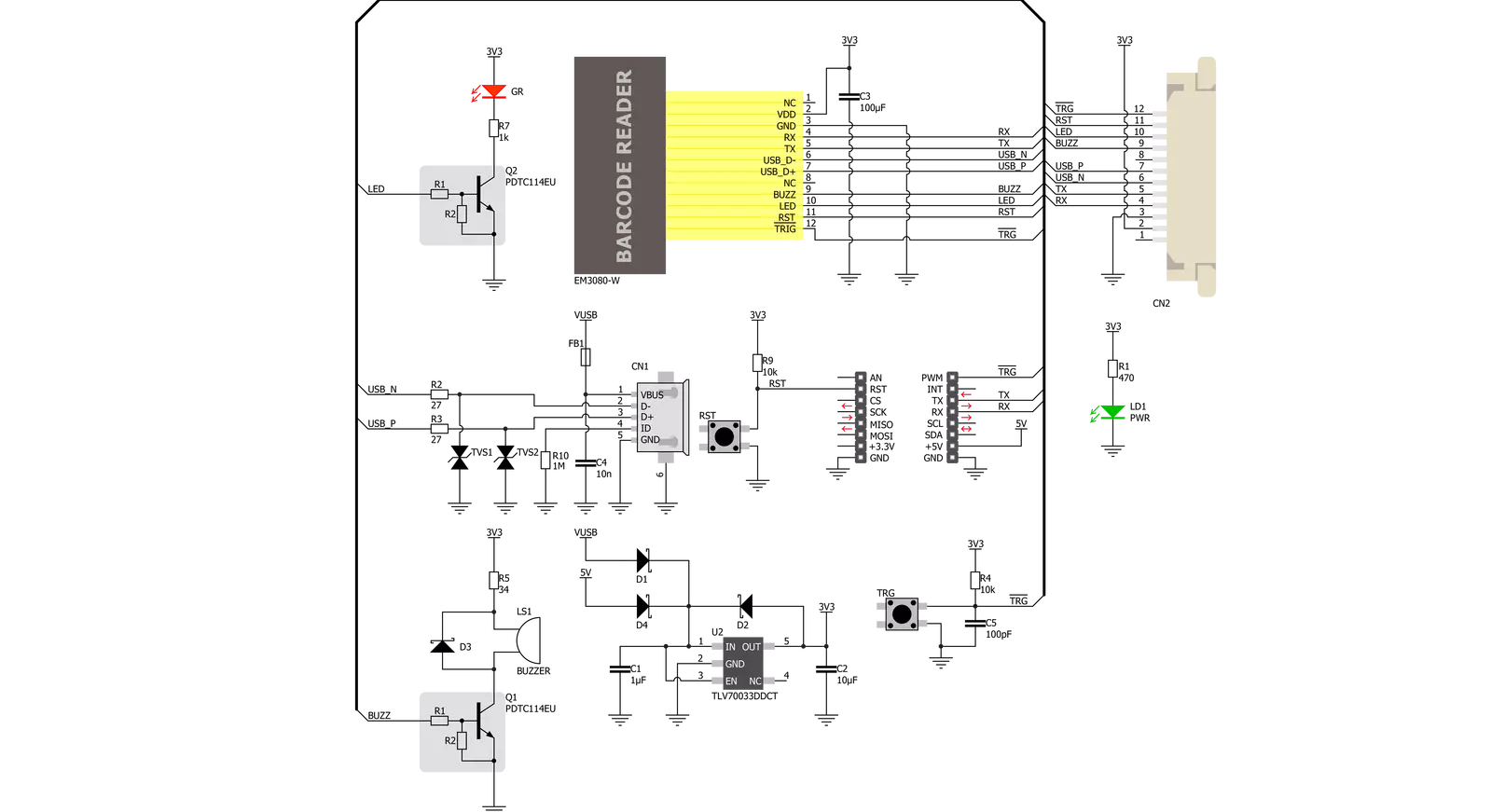
Barcode 2 Click is based on the EM3080-W, a barcode decoder chip that delivers superior performance and solid reliability with low power consumption from Newland Auto-ID Tech. Co., Ltd. This barcode scanner module is designed to quickly scan the barcode or QRcode data and send the information to the host MCU or PC. It features excellent near-field reading, wide-viewing angle, and snappy reading; it also offers stunning performance in decoding poor-quality and damaged barcodes. The advanced technology incorporated in the EM3080-W helps reduce its power consumption and prolong its service life. The EM3080-W scanner module uses a flat cable to connect to the Click board™ via the FPC Connector located on the top side of the PCB. This flat cable carries all the signals between the EM3080-W module and the host MCU, such as the RX, TX, buzzer, USB, LED, reset, and scanning trigger lines. Barcode 2 Click communicates with MCU using the UART interface at 9600 bps as its default communication protocol, but it is also
equipped with a micro USB port; thus, it can work both as a standalone device and a standard Click board. When the Click board™ is placed into the mikroBUS™ socket, it can exchange data via the standard mikroBUS™ RX and TX pins. Additional functionality, Reset and Scan Trigger push-buttons are provided and routed at RST and PWM pins of the mikroBUS™ socket labeled as RST and TRG used to control the device when working as a standalone device. Both lines, alongside the EM3080-W scanner module, are powered with TLV70033DDCT, low IQ LDO, which at its output gives a voltage of 3.3 V, and which at its input can receive a 5V from mikroBUS™ or can be powered from the micro USB connector. This Click board™ also features the CMT-8540S-SMT magnetic buzzer controlled by the EM3080-W for audible signalization and notification. You can create different sound patterns using the Sound library supported in our compilers. Signal frequency determines the sound pitch, and the duty cycle determines the amplitude (sound volume).
Pressing the onboard TRIG button or pulling the PWM pin of the mikroBUS™ to a LOW logic level for at least 10ms will trigger the barcode scan. A short beep sound and the Barcode Detection LED Indicator (GR) blink will indicate a successful barcode decoding. After releasing the TRIG line, the device will send the decoded information to the selected interface. The RST button is used to reset the device. Pressing the RST button or pulling the RST line to a LOW logic level for 100us to 500us will cause a device reset, followed by the greeting message sound. It should be noted that the device should not be reset too frequently; at least 2 seconds delay should exist between the reset cycles. This Click board™ can be operated only with a 5V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. Also, it comes equipped with a library containing functions and an example code that can be used as a reference for further development.

Features overview
Development board
Curiosity PIC32 MZ EF development board is a fully integrated 32-bit development platform featuring the high-performance PIC32MZ EF Series (PIC32MZ2048EFM) that has a 2MB Flash, 512KB RAM, integrated FPU, Crypto accelerator, and excellent connectivity options. It includes an integrated programmer and debugger, requiring no additional hardware. Users can expand
functionality through MIKROE mikroBUS™ Click™ adapter boards, add Ethernet connectivity with the Microchip PHY daughter board, add WiFi connectivity capability using the Microchip expansions boards, and add audio input and output capability with Microchip audio daughter boards. These boards are fully integrated into PIC32’s powerful software framework, MPLAB Harmony,
which provides a flexible and modular interface to application development a rich set of inter-operable software stacks (TCP-IP, USB), and easy-to-use features. The Curiosity PIC32 MZ EF development board offers expansion capabilities making it an excellent choice for a rapid prototyping board in Connectivity, IOT, and general-purpose applications.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Curiosity PIC32 MZ EF as your development board.













Software Support
Library Description
This library contains API for Barcode 2 Click driver.
Key functions:
barcode2_enable_scaning- The function enables or disables barcode scaning depending on state parametar valuebarcode2_process- The general process of collecting data the module sends
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief Barcode2 Click example
*
* # Description
* This example reads and processes data from Barcode 2 Clicks.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the UART driver used for communication and another UART bus used
* for data logging.
*
* ## Application Task
* This is an example that demonstrates the use of the Barcode 2 Click board.
* First, it enables scanning and waits up to 10 seconds for the barcode to be detected.
* If the barcode or QR Code is detected, it displays its content to the USB UART.
* After that, disables scanning for 3 seconds.
* Results are being sent to the Usart Terminal where you can track their changes.
*
* ## Additional Function
* - barcode2_process ( ) - The general process of collecting data the module sends.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "barcode2.h"
#include "string.h"
#define PROCESS_COUNTER 100
#define PROCESS_RX_BUFFER_SIZE 600
#define PROCESS_PARSER_BUFFER_SIZE 600
// ------------------------------------------------------------------ VARIABLES
static barcode2_t barcode2;
static log_t logger;
static char current_parser_buf[ PROCESS_PARSER_BUFFER_SIZE ];
// ------------------------------------------------------- ADDITIONAL FUNCTIONS
static void barcode2_process ( void )
{
int32_t rsp_size;
uint16_t rsp_cnt = 0;
char uart_rx_buffer[ PROCESS_RX_BUFFER_SIZE ] = { 0 };
uint16_t check_buf_cnt;
uint8_t process_cnt = PROCESS_COUNTER;
// Clear parser buffer
memset( current_parser_buf, 0, PROCESS_PARSER_BUFFER_SIZE );
while( process_cnt != 0 )
{
rsp_size = barcode2_generic_read( &barcode2, &uart_rx_buffer, PROCESS_RX_BUFFER_SIZE );
if ( rsp_size >0 )
{
// Validation of the received data
for ( check_buf_cnt = 0; check_buf_cnt < rsp_size; check_buf_cnt++ )
{
if ( uart_rx_buffer[ check_buf_cnt ] == 0 )
{
uart_rx_buffer[ check_buf_cnt ] = 13;
}
}
// Storages data in parser buffer
rsp_cnt += rsp_size;
if ( rsp_cnt < PROCESS_PARSER_BUFFER_SIZE )
{
strncat( current_parser_buf, uart_rx_buffer, rsp_size );
}
process_cnt = 3;
// Clear RX buffer
memset( uart_rx_buffer, 0, PROCESS_RX_BUFFER_SIZE );
}
else
{
process_cnt--;
// Process delay
Delay_100ms( );
}
}
if ( rsp_cnt > 0 )
{
if ( rsp_cnt > 80 )
{
log_printf( &logger, " QR Code:\r\n%s", current_parser_buf );
}
else
{
log_printf( &logger, " Barcode: %s", current_parser_buf );
}
log_printf( &logger, "\r\n------------------------\r\n" );
}
}
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
barcode2_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
barcode2_cfg_setup( &cfg );
BARCODE2_MAP_MIKROBUS( cfg, MIKROBUS_1 );
barcode2_init( &barcode2, &cfg );
Delay_ms ( 100 );
}
void application_task ( void )
{
log_printf( &logger, " Scanning enabled \r\n" );
log_printf( &logger, "------------------------\r\n" );
barcode2_enable_scaning( &barcode2, BARCODE2_ENABLE );
barcode2_process( );
barcode2_enable_scaning( &barcode2, BARCODE2_DISABLE );
log_printf( &logger, " Scanning disabled \r\n" );
log_printf( &logger, "------------------------\r\n" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Miscellaneous