Transform yourself into the ultimate tech provider using STUSB4700 and PIC32MZ2048EFM100
One charger to rule them all

Published Nov 11, 2023
Click board™
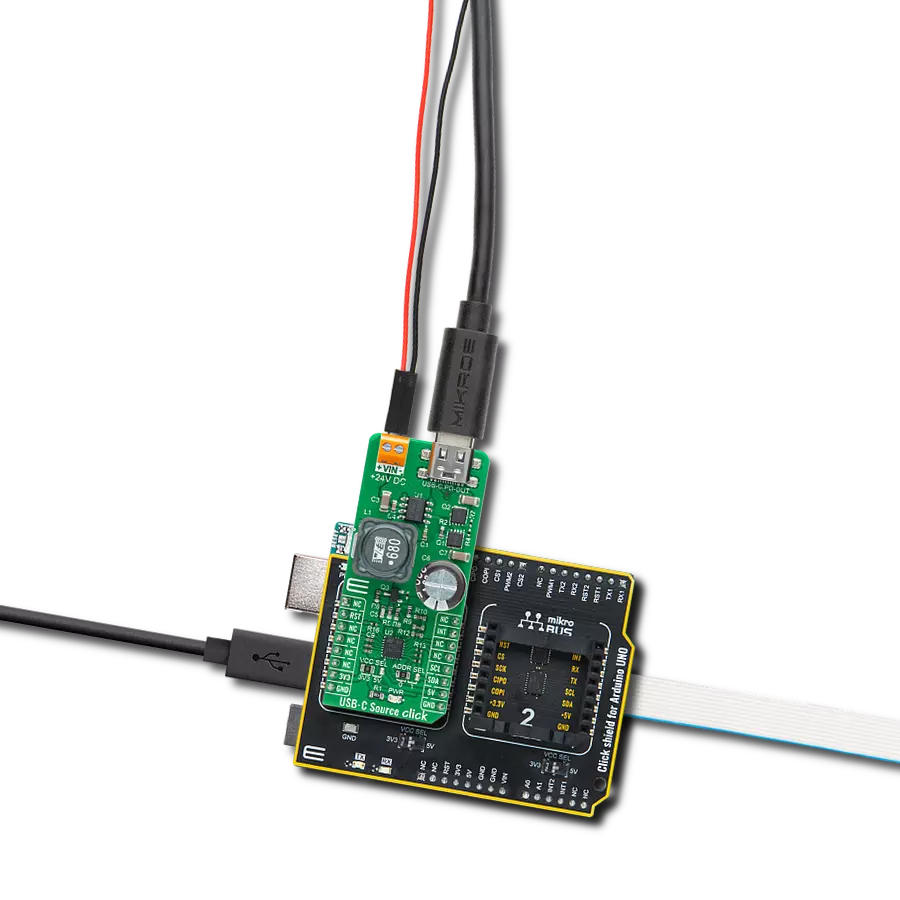
USB-C Source Click
Dev. board
Curiosity PIC32 MZ EF
Compiler
NECTO Studio
MCU
PIC32MZ2048EFM100
Simplify your life with a single USB-C Source charger that can power up all your devices with ease.
A
A
Hardware Overview
How does it work?
USB-C Source Click is based on the STUSB4700, a standalone autonomous USB power delivery controller optimized as a provider to negotiate a given amount of power to be sourced to an inquiring consumer device from STMicroelectronics. Combining high-voltage capability with low power consumption, the STUSB4700 can be safely used in systems that handle high voltage on the VBUS power path. The device integrates internal circuitry on the CC pins that tolerate high voltage and ensures protection up to 22 V in case of an unexpected short circuit with VBUS or in case of connection to a device supplying high voltage on VBUS. This Click board™ is powered from an external power supply voltage terminal to which a fixed voltage value of 24V is applied. After that, an input supply voltage goes through the ST1S14, a step-down monolithic power switching regulator able to deliver up to 3A DC current to the load depending on the application conditions also from
STMicroelectronics. This buck regulator establishes communication with another Sink device via a USB connector representing a Power Delivery Output Connector. In the source power role, the STUSB4700's VBUS_EN_SRC pin enables the outgoing VBUS power when the connection to a sink is established and VBUS is in the valid operating range. The open-drain output allows a PMOS transistor to be driven directly. It also has the VBUS_SENSE pin used to sense VBUS presence, monitor VBUS voltage, and discharge VBUS on the USB Type-C receptacle side. The STUSB4700 communicates with MCU using the standard I2C 2-wire interface that supports transfers up to 400kbit/s (Fast Mode) to configure, control, and read the device's status. It also has the possibility of the USB Power Delivery communication over CC1 and CC2 configuration channel pins used for connection and attachment detection, plug orientation determination, and system configuration management across USB
Type-C cables. Two addresses are available by default (0x28 and 0x29) depending on the setting of the address pin ADDR0 of the STUSB4700 programmed by the user, which determines the LSB of the slave address, and it can be selected by the onboard SMD jumper labeled as ADDR SEL allowing selection of the slave address LSB. Additional functionality, such as Reset and 'Alert' interrupt, is provided and routed at RST and INT pins of the mikroBUS™ socket. The RST pin resets all analog signals, states machine, and reloads configuration, while an interrupt output labeled INT represents alarm output. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used for further development.

Features overview
Development board
Curiosity PIC32 MZ EF development board is a fully integrated 32-bit development platform featuring the high-performance PIC32MZ EF Series (PIC32MZ2048EFM) that has a 2MB Flash, 512KB RAM, integrated FPU, Crypto accelerator, and excellent connectivity options. It includes an integrated programmer and debugger, requiring no additional hardware. Users can expand
functionality through MIKROE mikroBUS™ Click™ adapter boards, add Ethernet connectivity with the Microchip PHY daughter board, add WiFi connectivity capability using the Microchip expansions boards, and add audio input and output capability with Microchip audio daughter boards. These boards are fully integrated into PIC32’s powerful software framework, MPLAB Harmony,
which provides a flexible and modular interface to application development a rich set of inter-operable software stacks (TCP-IP, USB), and easy-to-use features. The Curiosity PIC32 MZ EF development board offers expansion capabilities making it an excellent choice for a rapid prototyping board in Connectivity, IOT, and general-purpose applications.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic

Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Curiosity PIC32 MZ EF as your development board.














Software Support
Library Description
This library contains API for USB-C Source Click driver.
Key functions:
usbcsource_hw_reset- HW reset function.usbcsource_get_alert_status- Get alert status function.usbcsource_set_pdo_config- Set PDO configuration function.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief USBCSource Click example
*
* # Description
* This is an example that demonstrates the use of the USB-C Source Click board.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization driver enables - I2C, set hardware reset and default configuration
* and display configuration of the five PDOs, also write log.
*
* ## Application Task
* In this example, we show port status, monitoring, and connections.
* All data logs write on USB uart changes every 5 sec.
*
* Additional Functions :
* - void display_port_status ( ) - Display port status info.
* - void display_monitoring_status ( ) - Display monitoring status info.
* - void display_connection_status ( ) - Display connection status info.
*
* @author Stefan Ilic
*
*/
#include "board.h"
#include "log.h"
#include "usbcsource.h"
static usbcsource_t usbcsource;
static log_t logger;
port_status_t port_status;
monitor_status_t monitor_status;
connection_status_t conn_status;
pdo_config_t pdo_data;
/**
* @brief USB-C Source display port status.
* @details This function is used for displaying port status.
*/
void display_port_status ( void );
/**
* @brief USB-C Source display monitoring status.
* @details This function is used for displaying monitoring status.
*/
void display_monitoring_status ( void );
/**
* @brief USB-C Source display connection status.
* @details This function is used for displaying connection status.
*/
void display_connection_status ( void );
void application_init ( void ) {
log_cfg_t log_cfg; /**< Logger config object. */
usbcsource_cfg_t usbcsource_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
usbcsource_cfg_setup( &usbcsource_cfg );
USBCSOURCE_MAP_MIKROBUS( usbcsource_cfg, MIKROBUS_1 );
err_t init_flag = usbcsource_init( &usbcsource, &usbcsource_cfg );
if ( I2C_MASTER_ERROR == init_flag ) {
log_error( &logger, " Application Init Error. " );
log_info( &logger, " Please, run program again... " );
for ( ; ; );
}
usbcsource_hw_reset( &usbcsource );
Delay_ms ( 500 );
usbcsource_default_config( &usbcsource );
Delay_ms ( 500 );
log_printf( &logger, "- - - - - - - - - - - - - -\r\n" );
usbcsource_get_pdo_config( &usbcsource, USBCSOURCE_SEL_PDO1, &pdo_data );
log_printf( &logger, " PDO 1 - Voltage = %.2f V \r\n", pdo_data.vtg_data );
log_printf( &logger, " PDO 1 - Current = %.2f A \r\n", pdo_data.curr_data );
log_printf( &logger, "- - - - - - - - - - - - - -\r\n" );
usbcsource_get_pdo_config( &usbcsource, USBCSOURCE_SEL_PDO2, &pdo_data );
log_printf( &logger, " PDO 2 - Voltage = %.2f V \r\n", pdo_data.vtg_data );
log_printf( &logger, " PDO 2 - Current = %.2f A \r\n", pdo_data.curr_data );
log_printf( &logger, "- - - - - - - - - - - - - -\r\n" );
usbcsource_get_pdo_config( &usbcsource, USBCSOURCE_SEL_PDO3, &pdo_data );
log_printf( &logger, " PDO 3 - Voltage = %.2f V \r\n", pdo_data.vtg_data );
log_printf( &logger, " PDO 3 - Current = %.2f A \r\n", pdo_data.curr_data );
log_printf( &logger, "- - - - - - - - - - - - - -\r\n" );
usbcsource_get_pdo_config( &usbcsource, USBCSOURCE_SEL_PDO4, &pdo_data );
log_printf( &logger, " PDO 4 - Voltage = %.2f V \r\n", pdo_data.vtg_data );
log_printf( &logger, " PDO 4 - Current = %.2f A \r\n", pdo_data.curr_data );
log_printf( &logger, "- - - - - - - - - - - - - -\r\n" );
usbcsource_get_pdo_config( &usbcsource, USBCSOURCE_SEL_PDO5, &pdo_data );
log_printf( &logger, " PDO 5 - Voltage = %.2f V \r\n", pdo_data.vtg_data );
log_printf( &logger, " PDO 5 - Current = %.2f A \r\n", pdo_data.curr_data );
log_printf( &logger, "- - - - - - - - - - - - - -\r\n" );
log_info( &logger, " Application Task " );
}
void application_task ( void ) {
usbcsource_get_port_status( &usbcsource, &port_status );
display_port_status( );
Delay_ms ( 100 );
log_printf( &logger, "- - - - - - - - - - - - - - " );
log_printf( &logger, "- - - - - - - - - - - - - -\r\n" );
usbcsource_get_monitoring_status( &usbcsource, &monitor_status );
display_monitoring_status( );
Delay_ms ( 100 );
log_printf( &logger, "- - - - - - - - - - - - - - " );
log_printf( &logger, "- - - - - - - - - - - - - -\r\n" );
usbcsource_get_connection_status( &usbcsource, &conn_status );
display_connection_status( );
Delay_ms ( 100 );
log_printf( &logger, "- - - - - - - - - - - - - - " );
log_printf( &logger, "- - - - - - - - - - - - - -\r\n" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
void display_port_status ( void ) {
log_printf( &logger, " Attached Device : " );
switch ( port_status.attached_device ) {
case USBCSOURCE_ATTACHED_DEVICE_NONE_ATT: {
log_printf( &logger, "No device connected\r\n" );
break;
}
case USBCSOURCE_ATTACHED_DEVICE_SNK_ATT: {
log_printf( &logger, "Sink device connected\r\n" );
break;
}
case USBCSOURCE_ATTACHED_DEVICE_SRC_ATT: {
log_printf( &logger, "Source device connected\r\n" );
break;
}
case USBCSOURCE_ATTACHED_DEVICE_DBG_ATT: {
log_printf( &logger, "Debug accessory device connected\r\n" );
break;
}
case USBCSOURCE_ATTACHED_DEVICE_AUD_ATT: {
log_printf( &logger, "Audio accessory device connected\r\n" );
break;
}
case USBCSOURCE_ATTACHED_DEVICE_POW_ACC_ATT: {
log_printf( &logger, "Power accessory device connected\r\n" );
break;
}
}
log_printf( &logger, " Low Power Standby :" );
if ( port_status.low_power_standby == USBCSOURCE_LOW_POWER_STANDBY_ON ) {
log_printf( &logger, " ON\r\n" );
} else {
log_printf( &logger, " OFF\r\n" );
}
log_printf( &logger, " Power Mode :" );
if ( port_status.power_mode == USBCSOURCE_POWER_MODE_SRC ) {
log_printf( &logger, " Source\r\n" );
} else {
log_printf( &logger, " Sink\r\n" );
}
log_printf( &logger, " Data Mode :" );
if ( port_status.data_mode == USBCSOURCE_DATA_MODE_DFP ) {
log_printf( &logger, " DFP\r\n" );
} else {
log_printf( &logger, " UFP\r\n" );
}
log_printf( &logger, " Attach :" );
if ( port_status.attach == USBCSOURCE_CONN_ATTACHED ) {
log_printf( &logger, " Attached\r\n" );
} else {
log_printf( &logger, " Unattached\r\n" );
}
}
void display_monitoring_status ( void ) {
log_printf( &logger, " VBUS Ready :" );
if ( monitor_status.vbus_ready == USBCSOURCE_VBUS_READY_CONNECTED ) {
log_printf( &logger, " Connected\r\n" );
} else {
log_printf( &logger, " Disconnected\r\n" );
}
log_printf( &logger, " VBUS Safe :" );
if ( monitor_status.vbus_vsafe0v == USBCSOURCE_VBUS_VSAFE0V_0_8V_LOWER ) {
log_printf( &logger, " Lower than 0.8V\r\n" );
} else {
log_printf( &logger, " Higher than 0.8V\r\n" );
}
log_printf( &logger, " VBUS Valid :" );
if ( monitor_status.vbus_valid == USBCSOURCE_VBUS_VALID_3_9V_HIGHER ) {
log_printf( &logger, " Lower than 3.9V\r\n" );
} else {
log_printf( &logger, " Higher than 3.9V\r\n" );
}
}
void display_connection_status ( void ) {
log_printf( &logger, " Conn. orientation :" );
if ( conn_status.cc_reverse == 1 ) {
log_printf( &logger, " Twisted\r\n" );
} else {
log_printf( &logger, " Straight\r\n" );
}
log_printf( &logger, " Sink Power Level :" );
if ( conn_status.snk_power_level == 0 ) {
log_printf( &logger, " Rp standard current is connected\r\n" );
} else if ( conn_status.snk_power_level == 1 ) {
log_printf( &logger, " Rp 1.5A is connected\r\n" );
} else {
log_printf( &logger, " Rp 3.0A is connected\r\n" );
}
}
// ------------------------------------------------------------------------ END