Explore the newest pressure data with BMP388 and PIC18F46K22
The future of pressure measurement

Published Oct 13, 2023
Click board™
Pressure 5 Click
Dev. board
EasyPIC v8
Compiler
NECTO Studio
MCU
PIC18F46K22
With our digital sensors, you can monitor and control pressure variations in real time, ensuring safety and precision in your applications
A
A
Hardware Overview
How does it work?
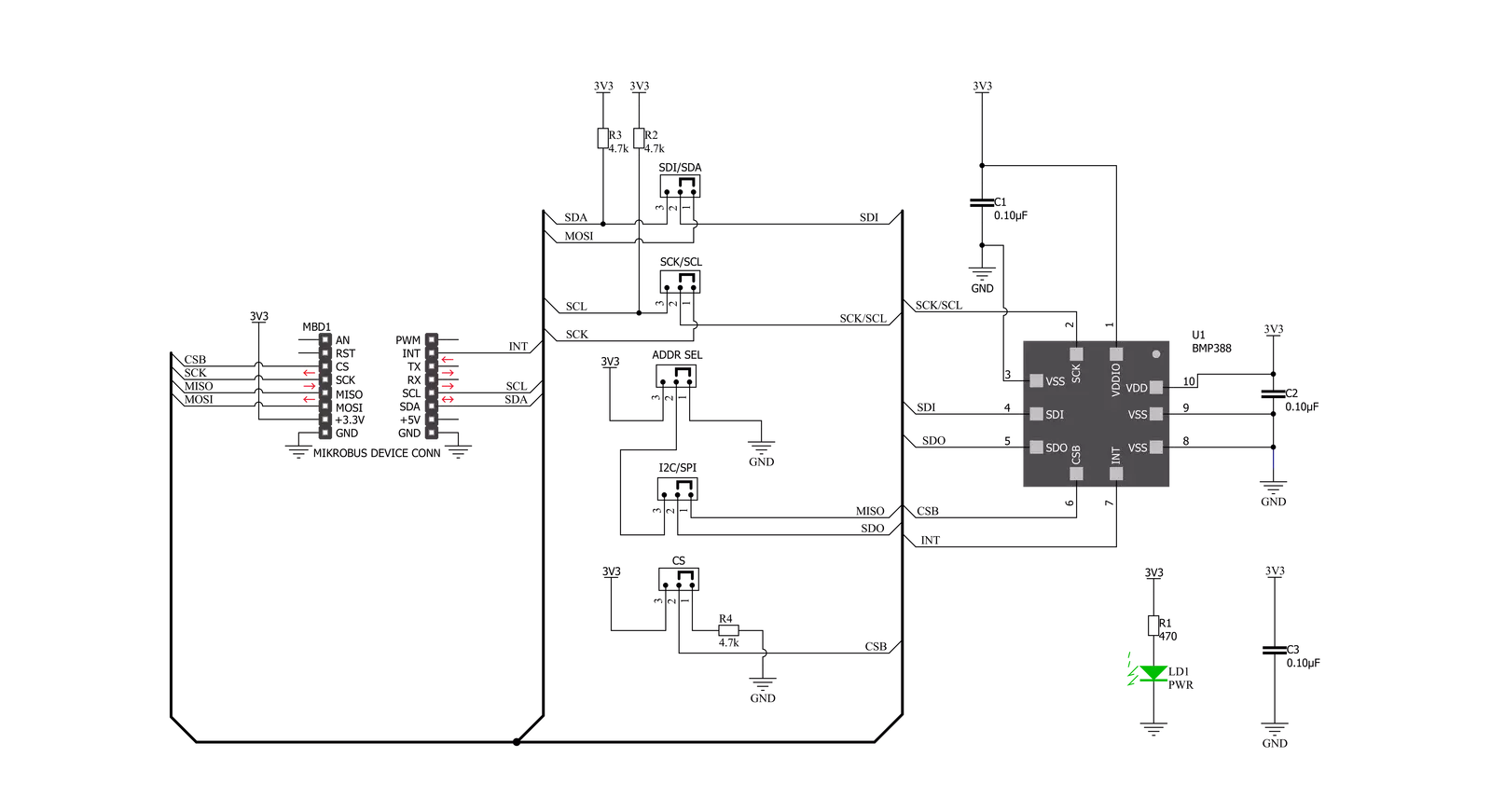
Pressure 5 Click is based on the BMP388, a digital pressure sensor, from Bosch Sensortec. This sensor consists of a piezo-resistive pressure sensing element and a mixed-signal ASIC which performs A/D conversions and provides the conversion results through a digital interface. This advanced MEMS technology offers a high measurement precision of 0.08hPa, as well as low TOC (thermal coefficient) of only 0.75 Pa/K. The sensor is enclosed in a small metal lid housing and is highly resilient: it can operate in a range of 300 hPa to 1250 hPa but can withstand up to 20,000 hPa before the membrane breaks down. The BMP388 offers a set of pressure and temperature measurement options. It can be programmed to skip either thermal or pressure measurement, allowing faster measurement of the required property. The low TOC of only 0.75Pa/K allows reading of the pressure with very small drift over temperature. Resolution of 0.08hPa allows calculating of the altitude with the accuracy of about 66 cm, which is ideal for indoor navigation applications (drones, flying toy models, and similar). The IIR filter is especially useful for indoor usage, allowing filtering of some short-term disturbances, such as slamming doors or windows. FIFO buffer allows for an optimization of the host firmware, reducing the data traffic through the
communication interface. It has 512 bytes and it is backed up by an interrupt engine, which can trigger an interrupt event when the buffer is full, or when the watermark level is reached. Also, the behavior of the FIFO buffer can be programmed to either skip new data once it is full or to overwrite the oldest data. The interrupt is available over the INT pin, and can be used to further optimize the host firmware (i.e. to reduce the power consumption by utilizing the INT pin to wake up the host MCU). Besides FIFO events, the INT pin also signals when there is a new data available at the output register (Data Ready event). This sensor consists of a mixed signal front-end (ASIC) and a piezo-sensitive pressure sensing element. The ASIC contains a low-noise 24-bit A/D converter, along with the digital signal processing section. The measurement data is available either over the I2C or the SPI interface. Pressure 5 click offers a choice between these two interfaces. The selection can be done by positioning SMD jumpers labeled as COMM SEL to an appropriate position. Note that all the jumpers must be placed to the same side, else the Click board™ may become unresponsive. While the I2C interface is selected, the BMP388 allows the choice of the least significant bit (LSB) of its I2C slave address. This can be done by using the SMD jumper
labeled as ADDR SEL. The overall power consumption depends on several factors, such as the oversampling value, measurement rate, power mode, standby duration, and so on. Bosh Sensortech recommends a set of operational parameters for different applications, in the form of a table, in the BMP388 datasheet. In general, this sensor allows several power modes, regardless of the selected measurement parameters. When the measurement is completed, raw ADC values will be available in the output registers. However, to obtain actual pressure and temperature readings, a compensation algorithm needs to be applied. A set of compensation parameters is available in the non-volatile memory of the BMP388 device. These compensation parameters take into account slight differences between the produced samples and each BMP388 device has its own set of parameters. The BMP388 datasheet offers detailed instructions on how to apply these compensating algorithms properly. However, MikroElektronika provides a library with functions which can be used for a simplified and thus faster application development. The library also contains a demo example, which demonstrates the use of these functions. The demo application can be used as a reference for a custom design.


Features overview
Development board
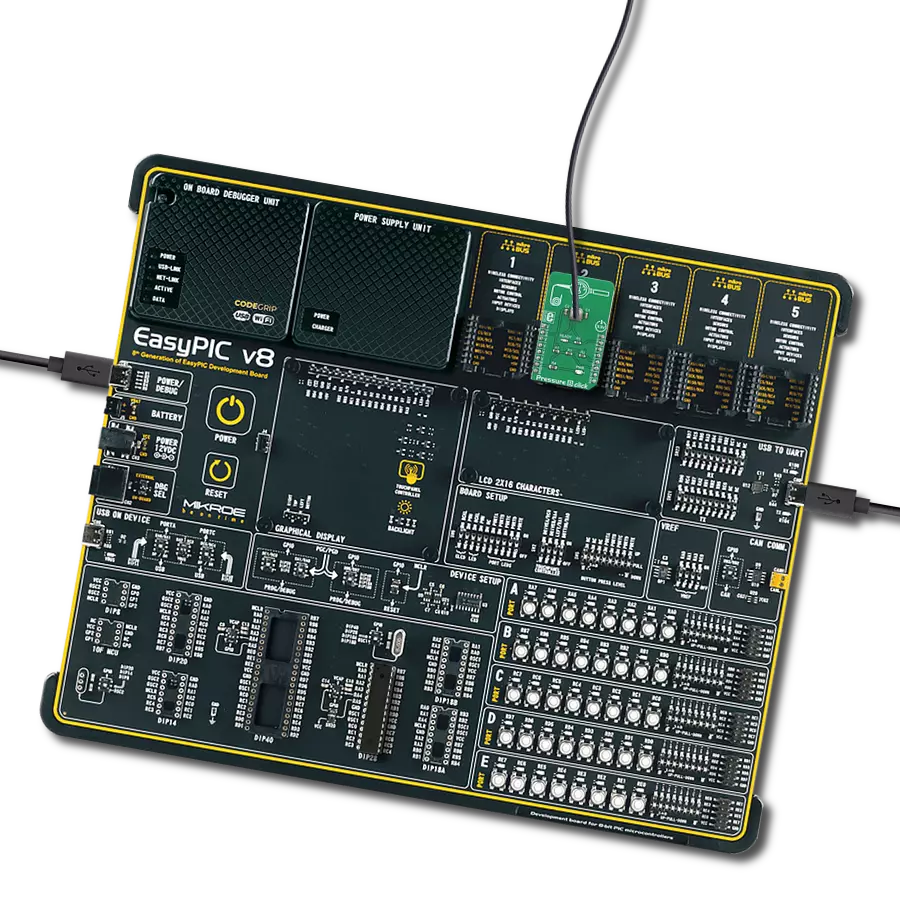
EasyPIC v8 is a development board specially designed for the needs of rapid development of embedded applications. It supports many high pin count 8-bit PIC microcontrollers from Microchip, regardless of their number of pins, and a broad set of unique functions, such as the first-ever embedded debugger/programmer. The development board is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, connectors, and others, in one place. Thanks to innovative manufacturing technology, EasyPIC v8 provides a fluid and immersive working experience, allowing access anywhere and under any
circumstances at any time. Each part of the EasyPIC v8 development board contains the components necessary for the most efficient operation of the same board. In addition to the advanced integrated CODEGRIP programmer/debugger module, which offers many valuable programming/debugging options and seamless integration with the Mikroe software environment, the board also includes a clean and regulated power supply module for the development board. It can use a wide range of external power sources, including a battery, an external 12V power supply, and a power source via the USB Type-C (USB-C) connector.
Communication options such as USB-UART, USB DEVICE, and CAN are also included, including the well-established mikroBUS™ standard, two display options (graphical and character-based LCD), and several different DIP sockets. These sockets cover a wide range of 8-bit PIC MCUs, from the smallest PIC MCU devices with only eight up to forty pins. EasyPIC v8 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC
MCU Memory (KB)
64
Silicon Vendor
Microchip
Pin count
40
RAM (Bytes)
3896
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

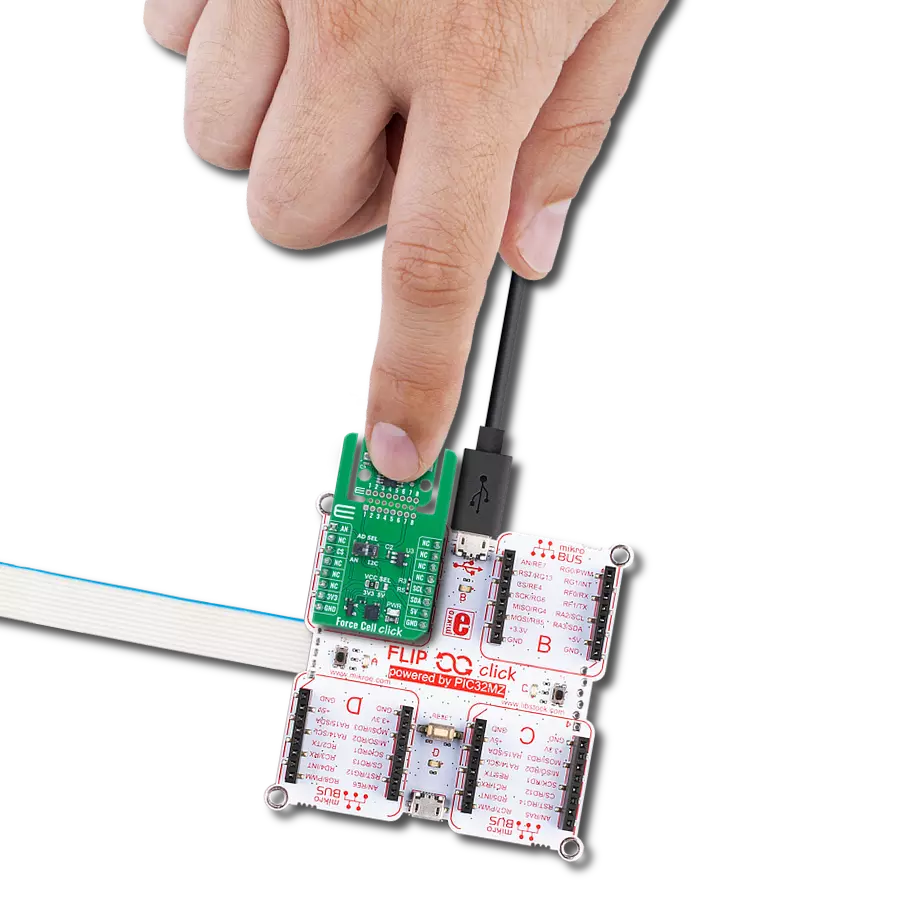
Start by selecting your development board and Click board™. Begin with the EasyPIC v8 as your development board.














Software Support
Library Description
This library contains API for Pressure 5 Click driver.
Key functions:
pressure5_update_coefficient- This function allows you to update the calibration coefficientpressure5_get_temperature_data- This function gets temperature in Celsiuspressure5_get_pressure_data- This function gets pressure in mBar
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief Pressure5 Click example
*
* # Description
* This example preforms Temperature and Pressure measurement.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization driver init, test comunication, software reset, update
* coefficient and configuration module for start measurement.
*
* ## Application Task
* Reads Pressure data in [mBar] and Temperature data in [C].
* Logs all data to the USBUART every 2 seconds.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "pressure5.h"
// ------------------------------------------------------------------ VARIABLES
static pressure5_t pressure5;
static log_t logger;
static float temperature;
static float pressure;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
pressure5_cfg_t cfg;
PRESSURE5_RETVAL init_ret;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
pressure5_cfg_setup( &cfg );
PRESSURE5_MAP_MIKROBUS( cfg, MIKROBUS_1 );
pressure5_init( &pressure5, &cfg );
pressure5_default_cfg( &pressure5 );
}
void application_task ( void )
{
// Task implementation.
temperature = pressure5_get_temperature_data ( &pressure5 );
log_printf( &logger, "Temperature: %.2f C\r\n", temperature );
pressure = pressure5_get_pressure_data ( &pressure5 );
log_printf( &logger, "Pressure: %.2f mBar\r\n ", pressure );
log_printf( &logger, "\r\n" );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END