Explore the captivating world of magnetism through the lens of HMC1512 and PIC18LF25K40
Beyond the spin

Published Jan 23, 2024
Click board™
Magnetic rotary Click
Dev Board
Curiosity HPC
Compiler
NECTO Studio
MCU
PIC18LF25K40
Learn how magnetic rotary sensors go beyond mere rotations, serving as indispensable tools for innovation, enabling advancements in navigation systems, medical devices, and more
A
A
Hardware Overview
How does it work?
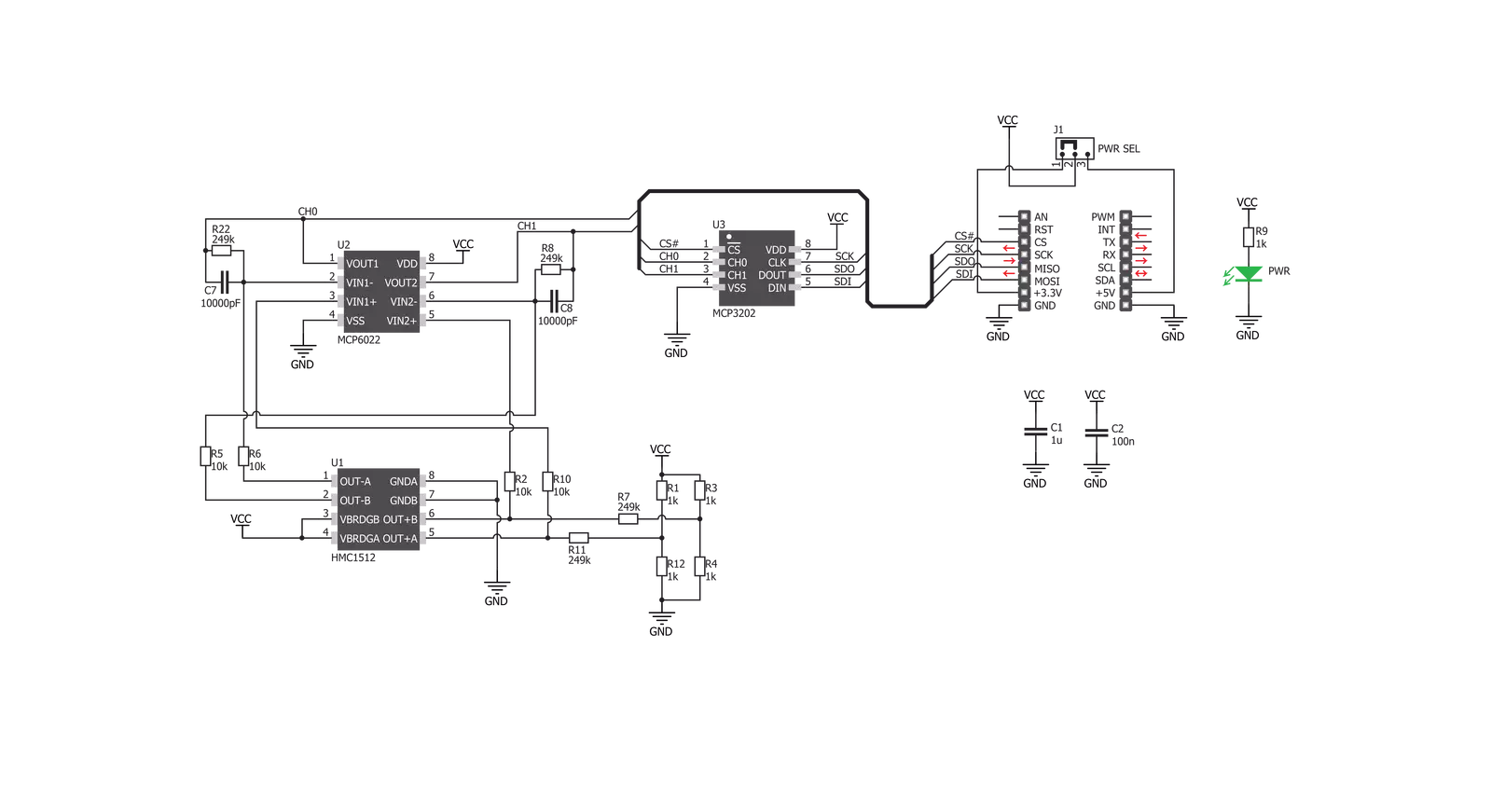
Magnetic rotary Click is based on the HMC1512, a magnetic displacement sensor, from Honeywell. The key feature of the HMC1512 IC is the high accuracy of the magnetic field sensing. Unlike most of the magnetic sensors on the market which rely on the Hall-effect, the integrated sensors of the HMC1512 IC are produced using the Honeywell proprietary Anisotropic Magneto-Resistive (AMR) technology, which yields an absolute magnetic field position sensing with the angular error of only 0.05° in the range of ±90°. The magneto-resistive sensing elements form a saturated-mode Wheatstone bridge, positioned in the XZ plane (parallel with the surface of the IC). The HMC1512 contains two such integrated bridges, bridge A, and bridge B. These bridges are positioned at the middle of the IC casing, which is the optimal position for rotary applications. One bridge is physically rotated by 45° from the other, allowing the HMC1512 IC to cover the full range of ±90° (2x45°), maintaining its sensing accuracy. The IC outputs an analog differential voltage with respect to the angle of the magnetic field. The
voltage from the selected mikroBUS™ power rail is directly applied to the internal Wheatstone bridge of the HMC1512. By construction, in the absence of the magnetic field, its outputs will be set at half the supply voltage (with the small offset of 3mV/V typically). If there is a magnetic field positioned at 0° in respect to one of the bridges, it will cause no disbalance of the magneto-resistive elements for that bridge. However, in the other bridge, the same magnetic field will cause it to reach its peak output value, since that bridge is rotated by 45°. The outputs of the Wheatstone bridges are routed to the dual operational amplifier, which serves as the buffer for the A/D converter. As a dual operational amplifier, the MCP6022 from Microchip is used. This op-amp is biased to half the power supply voltage and has a gain of 25. Two buffered signals are then used as inputs for each channel of the A/D converter. Magnetic rotary click uses the MCP3202, a two-channel, 12-bit A/D converter (ADC) with SPI Interface, by Microchip. This ADC has a high resolution which can be used even for more demanding applications.
At 0°, the ADC will output half of its full-scale (FS) value, and it will swing towards 0 if the sign of the orientation of the magnetic field is positioned towards the negative direction, and 4095 if the orientation of the magnetic field is positioned towards the positive direction. Each bridge output is routed to a separate ADC input, so it can be independently converted. The MCP3202 uses the power supply as the reference voltage, allowing ADC conversion within the range of the input signal. Converted output values can be read via the SPI interface, routed to the mikroBUS™ SPI pins for easy interfacing with a vast number of different microcontrollers (MCUs). This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the PWR SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.


Features overview
Development board
Curiosity HPC, standing for Curiosity High Pin Count (HPC) development board, supports 28- and 40-pin 8-bit PIC MCUs specially designed by Microchip for the needs of rapid development of embedded applications. This board has two unique PDIP sockets, surrounded by dual-row expansion headers, allowing connectivity to all pins on the populated PIC MCUs. It also contains a powerful onboard PICkit™ (PKOB), eliminating the need for an external programming/debugging tool, two mikroBUS™ sockets for Click board™ connectivity, a USB connector, a set of indicator LEDs, push button switches and a variable potentiometer. All
these features allow you to combine the strength of Microchip and Mikroe and create custom electronic solutions more efficiently than ever. Each part of the Curiosity HPC development board contains the components necessary for the most efficient operation of the same board. An integrated onboard PICkit™ (PKOB) allows low-voltage programming and in-circuit debugging for all supported devices. When used with the MPLAB® X Integrated Development Environment (IDE, version 3.0 or higher) or MPLAB® Xpress IDE, in-circuit debugging allows users to run, modify, and troubleshoot their custom software and hardware
quickly without the need for additional debugging tools. Besides, it includes a clean and regulated power supply block for the development board via the USB Micro-B connector, alongside all communication methods that mikroBUS™ itself supports. Curiosity HPC development board allows you to create a new application in just a few steps. Natively supported by Microchip software tools, it covers many aspects of prototyping thanks to many number of different Click boards™ (over a thousand boards), the number of which is growing daily.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC
MCU Memory (KB)
32
Silicon Vendor
Microchip
Pin count
28
RAM (Bytes)
2048
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Curiosity HPC as your development board.














Track your results in real time
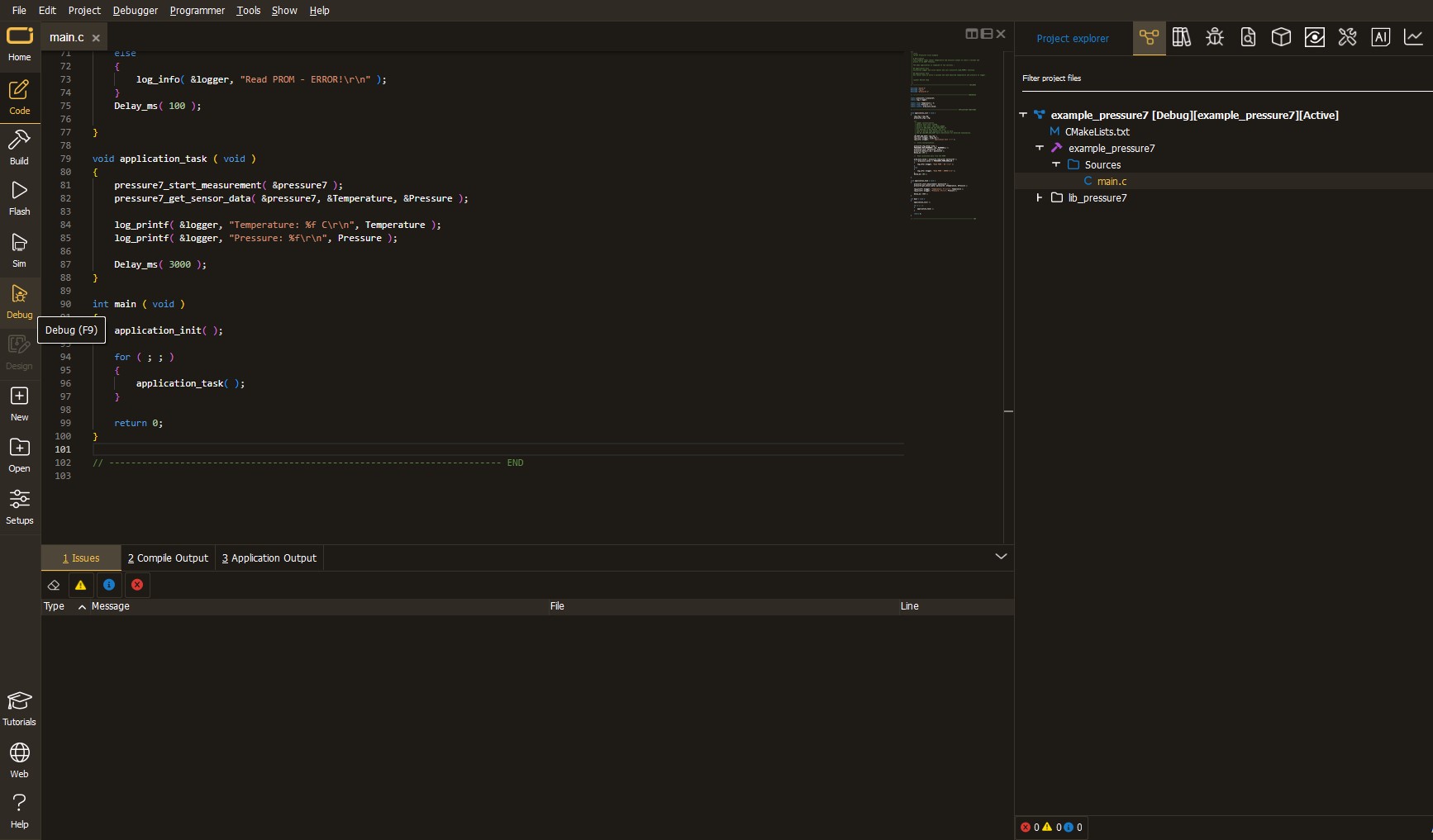
Application Output
After loading the code example, pressing the "DEBUG" button builds and programs it on the selected setup.
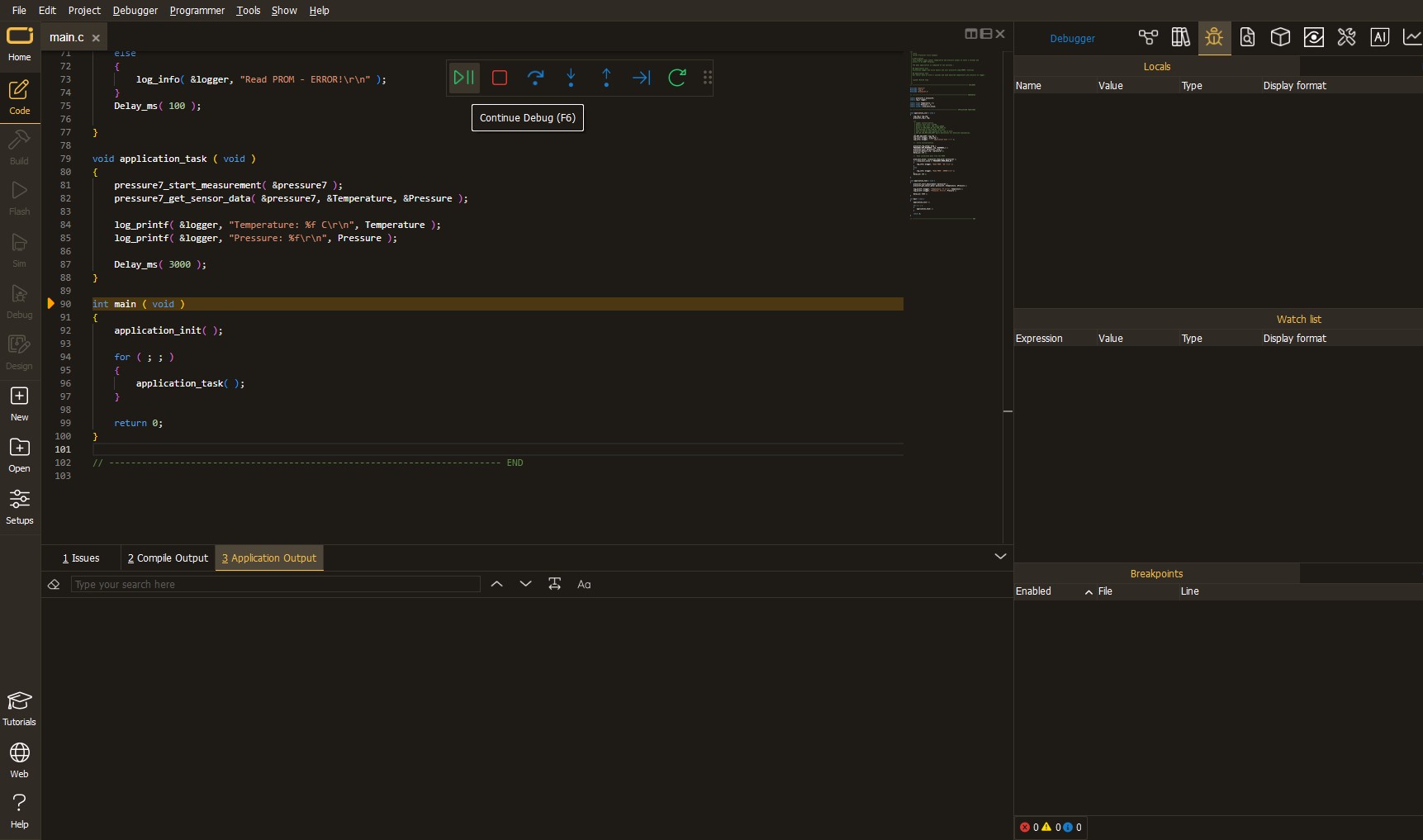
After programming is completed, a header with buttons for various actions available in the IDE appears. By clicking the green "PLAY "button, we start reading the results achieved with Click board™.
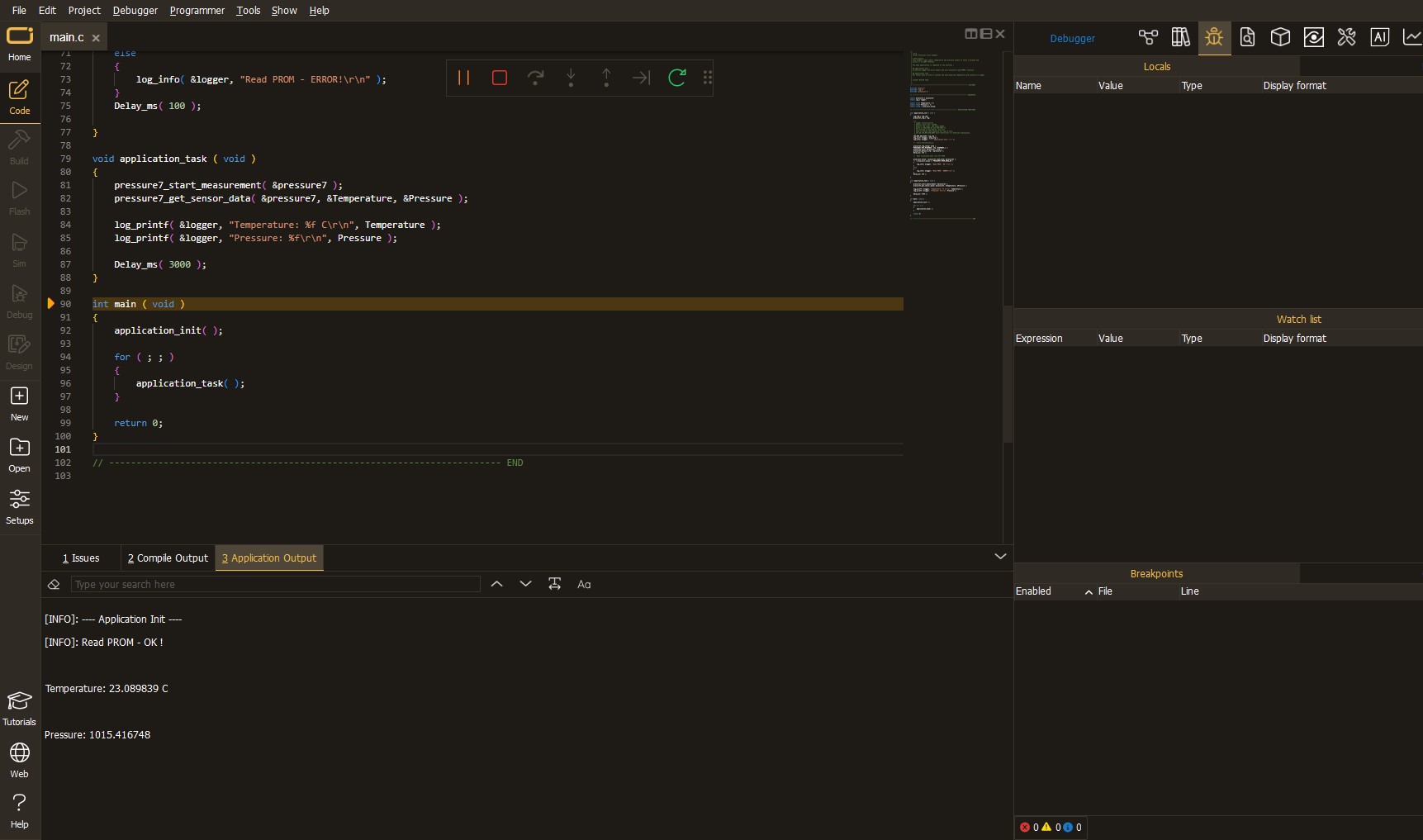
Upon completion of programming, the Application Output tab is automatically opened, where the achieved result can be read. In case of an inability to perform the Debug function, check if a proper connection between the MCU used by the setup and the CODEGRIP programmer has been established. A detailed explanation of the CODEGRIP-board connection can be found in the CODEGRIP User Manual. Please find it in the RESOURCES section.
Software Support
Library Description
This library contains API for Magnetic rotary Click driver.
Key functions:
magnrotary_read_adc- This function returns a 12bit result of AD conversionmagnrotary_out_volt_adc- This function returns ADC voltage value calculated to millivolts, depending on the voltage selectionmagnrotary_get_field_angle- This function returns a magnetic field angle calculated to degrees,from -90 to 90 degrees.
Open Source
Code example
This example can be found in NECTO Studio. Feel free to download the code, or you can copy the code below.
/*!
* \file
* \brief MagneticRotary Click example
*
* # Description
* On every 500 miliseconds reads a magnetic field angle calculated to degrees for channel A
* in Single-Ended Mode and logs results on uart terminal.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes peripherals, pins, SPI interface for communication with the device.
*
* ## Application Task
* Reads a magnetic field angle calculated to degrees for channel A
* in Single-Ended Mode and logs results on uart terminal.
* Repeats operation every 500 milliseconds.
* Note : The angle can be measured in the range from -90 to 90 degrees.
*
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "magneticrotary.h"
// ------------------------------------------------------------------ VARIABLES
static magneticrotary_t magneticrotary;
static log_t logger;
static double magn_angle;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
magneticrotary_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
magneticrotary_cfg_setup( &cfg );
MAGNETICROTARY_MAP_MIKROBUS( cfg, MIKROBUS_1 );
magneticrotary_init( &magneticrotary, &cfg );
log_info(&logger, "Magnetic rotary successufully initialized!\r\n");
}
void application_task ( void )
{
// Task implementation.
magn_angle = magnrotary_get_field_angle(
&magneticrotary, MAGNROTARY_CHA_POS_GND_NEG |
MAGNROTARY_MSB_ZEROS_ORDER );
log_printf( &logger, "Angle: %.2lf \r\n ", magn_angle );
Delay_ms( 500 );
}
void main ( void )
{
application_init( );
for ( ; ; )
{
application_task( );
}
}
// ------------------------------------------------------------------------ END















