Modernize RS232 connections with MAX3232 and PIC18F2550
Upgrading data transfer: The only UART-to-RS232 bridge you need
Published Jan 23, 2024
Click board™
RS232 Click
Dev. board
Curiosity HPC
Compiler
NECTO Studio
MCU
PIC18F2550
Efficient solution for incorporating RS-232 communication capabilities into various electronic projects and applications, including serial data exchange and modem communication
A
A
Hardware Overview
How does it work?
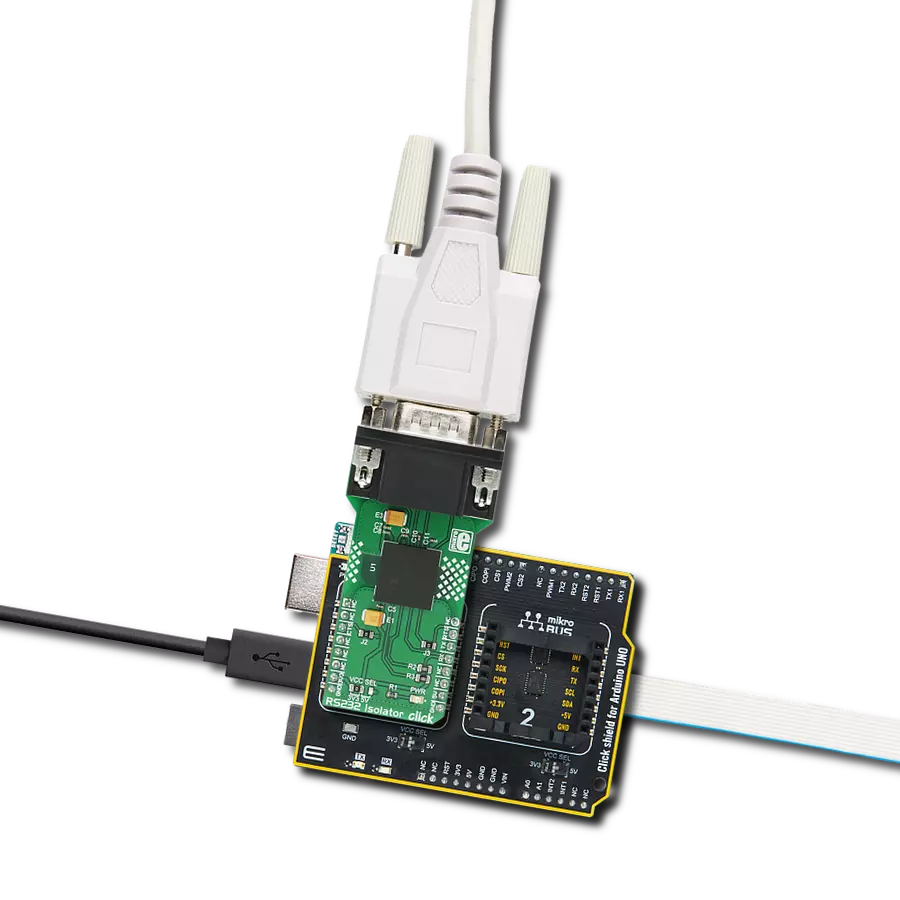
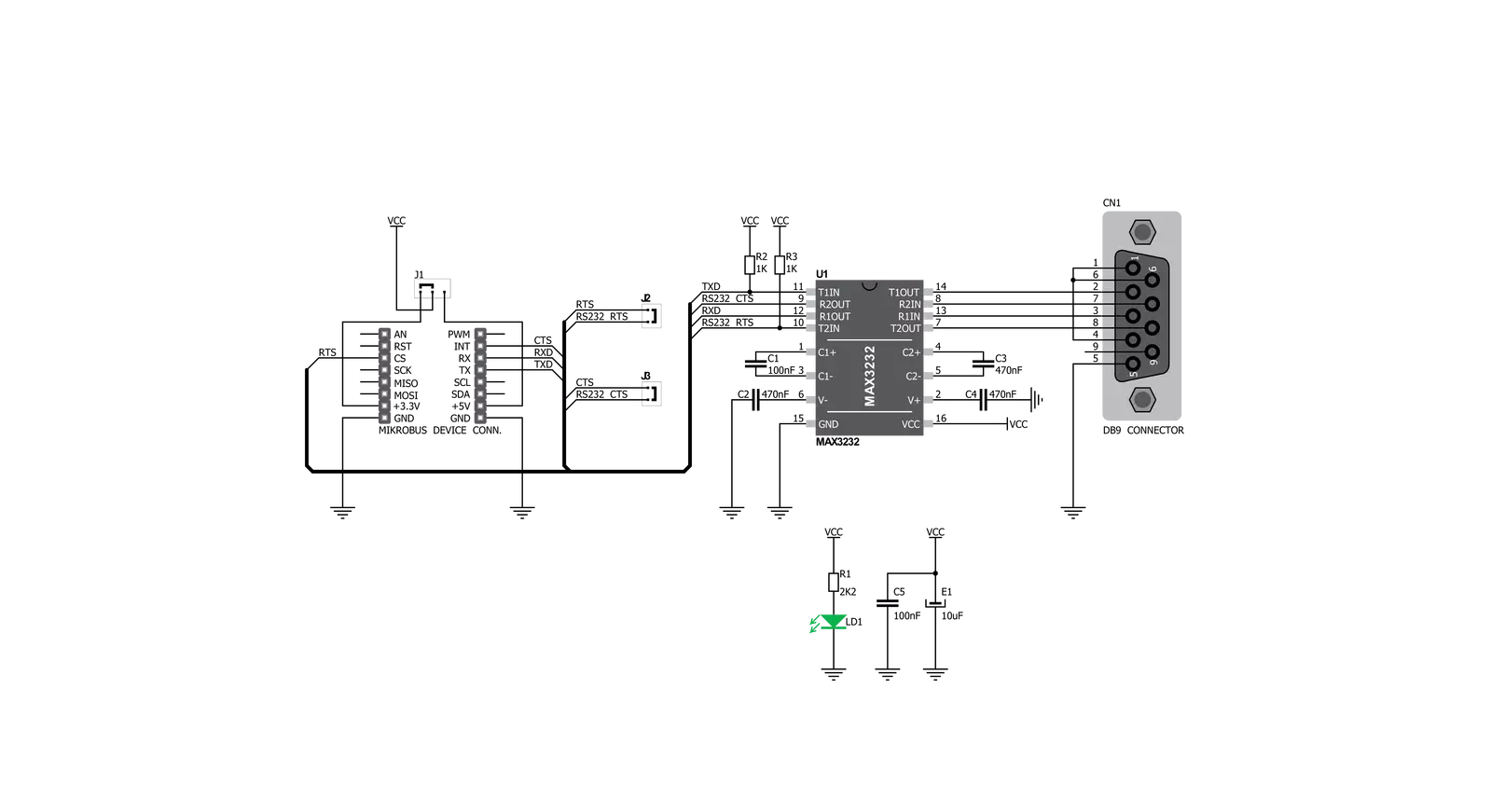
RS232 Click is based on the MAX3232, a low-power, true RS-232 transceiver from Analog Devices. Several protection features improve the reliability of this device. It has up to ±15kV ESD protection, ensuring no electrical discharge damages the circuit on the input side. The MAX3232 has two receivers and two transmitter channels, and it is used to bridge the physical differences between the CMOS/TTL signal levels and RS-232 bus levels. While CMOS/TTL signal levels vary from 0V to 5V typically, RS-232 uses signal levels that range from ±5V up to ±15 V. Furthermore, the RS-232 equipment is required to withstand short circuits for any voltage, up to ±25V, during an indefinite time interval. MAX3232 IC uses two internal charge pumps to obtain required driving levels of ±5V on its transceiver sections.
This Click board™ offers two inputs and two outputs, which feature the CMOS/TTL logic levels. These lines can be used to either drive the RS-232 bus or receive the incoming data from the bus. Receivers convert the RS-232 signals to MCU-acceptable UART-type signals, while transmitters convert the MCU UART signal to RS-232 levels. Therefore, one input/output pair is routed to the UART pins of the mikroBUS™, allowing simplified operation by the host MCU, while another pair of input/output signals is routed via the J2 and J3 SMD jumpers and is used as the UART RTS and CTS. These pins are typically used for the UART communication with the hardware flow control. The jumpers are unpopulated by default. The MAX3232 device can maintain a 120kbps data rate with the worst-case scenario - load of 3kΩ in parallel with
1000pF, while the typical communication speed goes up to 232 kbps. The RS232 Click comes equipped with the SUB D connector, typically found on many devices that use the RS-232 interface, and can be used for connection directly to the RS-232 bus. RS232 uses a standard 2-Wire UART interface to communicate with the host MCU. If using it with soldered J2 and J3 jumpers, then you can use the UART RTS and CTS hardware flow control pins. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the PWR SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
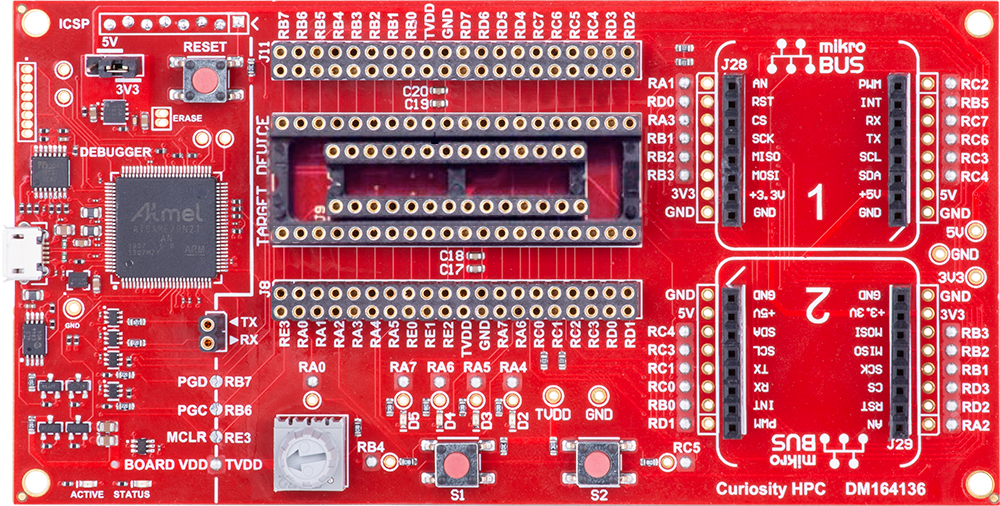
Curiosity HPC, standing for Curiosity High Pin Count (HPC) development board, supports 28- and 40-pin 8-bit PIC MCUs specially designed by Microchip for the needs of rapid development of embedded applications. This board has two unique PDIP sockets, surrounded by dual-row expansion headers, allowing connectivity to all pins on the populated PIC MCUs. It also contains a powerful onboard PICkit™ (PKOB), eliminating the need for an external programming/debugging tool, two mikroBUS™ sockets for Click board™ connectivity, a USB connector, a set of indicator LEDs, push button switches and a variable potentiometer. All
these features allow you to combine the strength of Microchip and Mikroe and create custom electronic solutions more efficiently than ever. Each part of the Curiosity HPC development board contains the components necessary for the most efficient operation of the same board. An integrated onboard PICkit™ (PKOB) allows low-voltage programming and in-circuit debugging for all supported devices. When used with the MPLAB® X Integrated Development Environment (IDE, version 3.0 or higher) or MPLAB® Xpress IDE, in-circuit debugging allows users to run, modify, and troubleshoot their custom software and hardware
quickly without the need for additional debugging tools. Besides, it includes a clean and regulated power supply block for the development board via the USB Micro-B connector, alongside all communication methods that mikroBUS™ itself supports. Curiosity HPC development board allows you to create a new application in just a few steps. Natively supported by Microchip software tools, it covers many aspects of prototyping thanks to many number of different Click boards™ (over a thousand boards), the number of which is growing daily.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC
MCU Memory (KB)
32
Silicon Vendor
Microchip
Pin count
28
RAM (Bytes)
2048
You complete me!
Accessories
DB9 Cable Female-to-Female (2m) cable is essential for establishing dependable serial data connections between devices. With its DB9 female connectors on both ends, this cable enables a seamless link between various equipment, such as computers, routers, switches, and other serial devices. Measuring 2 meters in length, it offers flexibility in arranging your setup without compromising data transmission quality. Crafted with precision, this cable ensures consistent and reliable data exchange, making it suitable for industrial applications, office environments, and home setups. Whether configuring networking equipment, accessing console ports, or utilizing serial peripherals, this cable's durable construction and robust connectors guarantee a stable connection. Simplify your data communication needs with the 2m DB9 female-to-female cable, an efficient solution designed to meet your serial connectivity requirements easily and efficiently.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
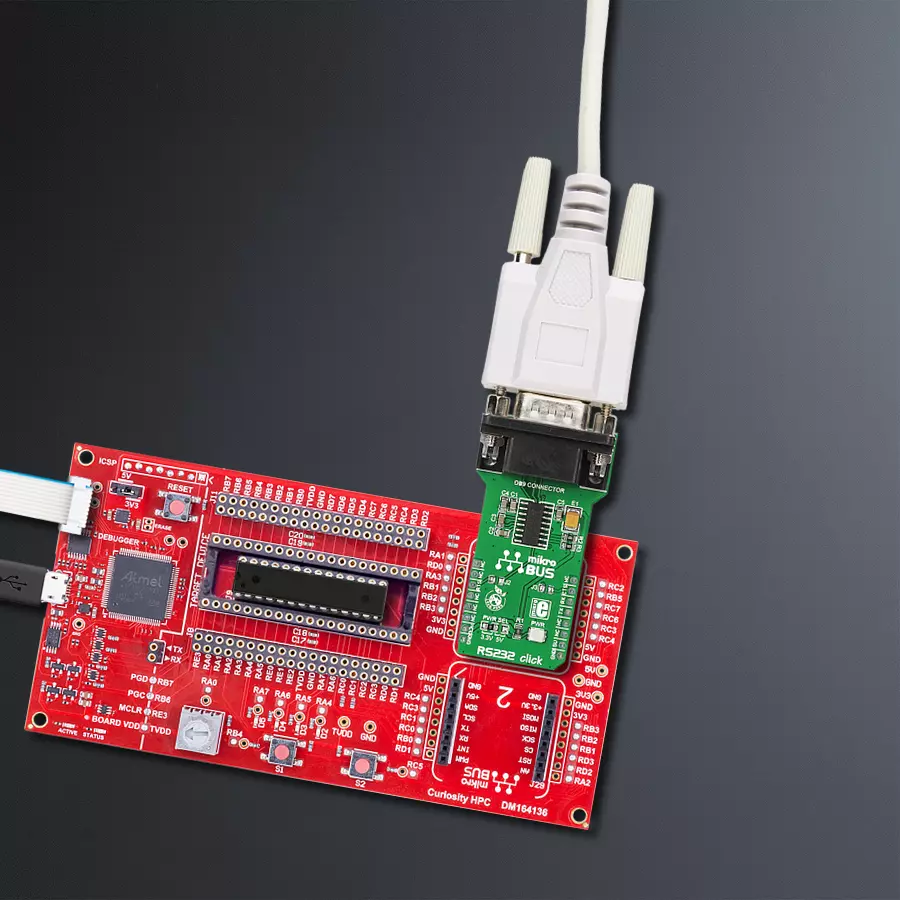
Project assembly
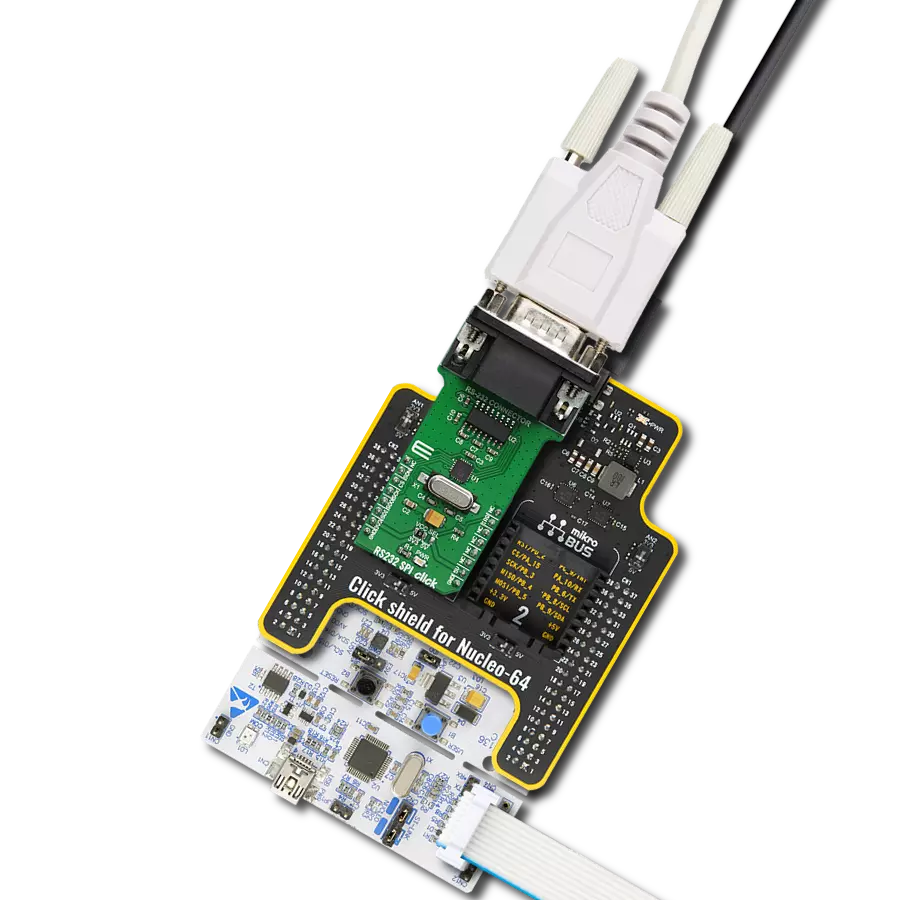
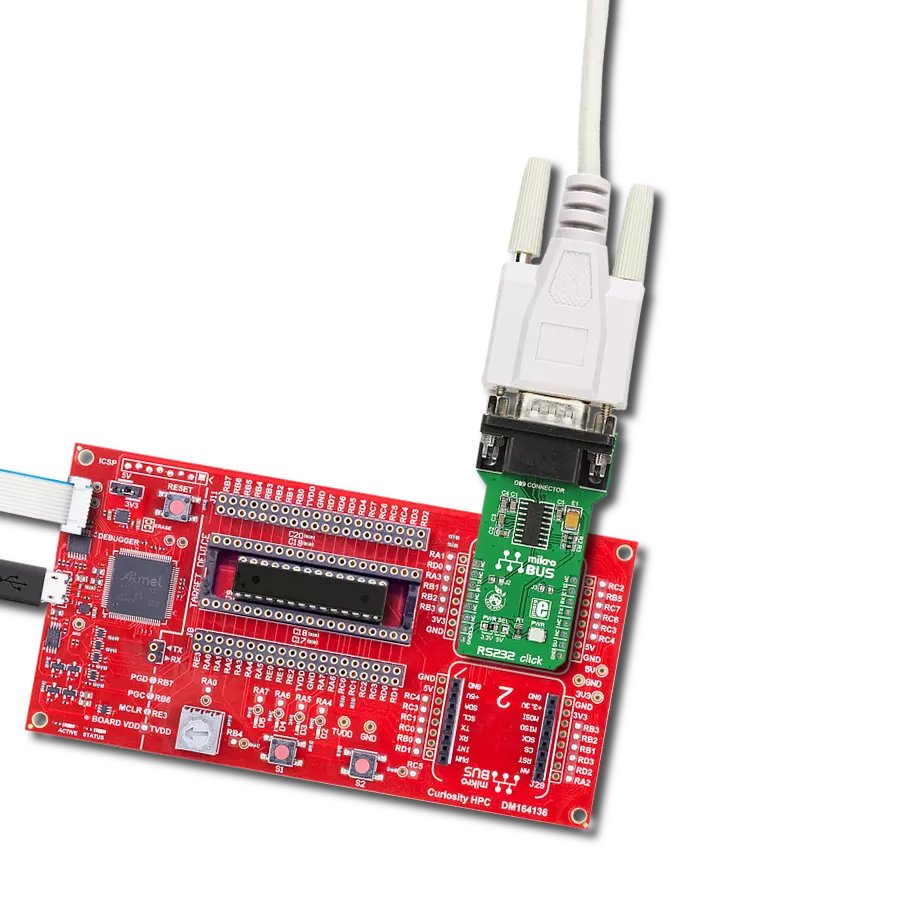
Start by selecting your development board and Click board™. Begin with the Curiosity HPC as your development board.














Software Support
Library Description
This library contains API for RS232 Click driver.
Key functions:
rs232_generic_write- Generic write function.rs232_generic_read- Generic read function.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief Rs2322 Click example
*
* # Description
* This example reads and processes data from RS232 2 Clicks.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes driver.
*
* ## Application Task
* Reads the received data.
*
* ## Additional Function
* - rs2322_process ( ) - The general process of collecting presponce
* that sends a module.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "rs2322.h"
#include "string.h"
#define PROCESS_COUNTER 10
#define PROCESS_RX_BUFFER_SIZE 500
#define PROCESS_PARSER_BUFFER_SIZE 500
#define TEXT_TO_SEND "MikroE\r\n"
// ------------------------------------------------------------------ VARIABLES
#define DEMO_APP_RECEIVER
//#define DEMO_APP_TRANSMITER
static rs2322_t rs2322;
static log_t logger;
static char current_rsp_buf[ PROCESS_PARSER_BUFFER_SIZE ];
static uint8_t send_data_cnt = 0;
// ------------------------------------------------------- ADDITIONAL FUNCTIONS
static void rs2322_process ( void )
{
int16_t rsp_size;
uint16_t rsp_cnt = 0;
char uart_rx_buffer[ PROCESS_RX_BUFFER_SIZE ] = { 0 };
uint8_t check_buf_cnt;
uint8_t process_cnt = PROCESS_COUNTER;
// Clear parser buffer
memset( current_rsp_buf, 0 , PROCESS_PARSER_BUFFER_SIZE );
while( process_cnt != 0 )
{
rsp_size = rs2322_generic_read( &rs2322, &uart_rx_buffer, PROCESS_RX_BUFFER_SIZE );
if ( rsp_size > 0 )
{
// Validation of the received data
for ( check_buf_cnt = 0; check_buf_cnt < rsp_size; check_buf_cnt++ )
{
if ( uart_rx_buffer[ check_buf_cnt ] == 0 )
{
uart_rx_buffer[ check_buf_cnt ] = 13;
}
}
log_printf( &logger, "%s\r\n", uart_rx_buffer );
// Storages data in parser buffer
rsp_cnt += rsp_size;
if ( rsp_cnt < PROCESS_PARSER_BUFFER_SIZE )
{
strncat( current_rsp_buf, uart_rx_buffer, rsp_size );
}
// Clear RX buffer
memset( uart_rx_buffer, 0, PROCESS_RX_BUFFER_SIZE );
}
else
{
process_cnt--;
// Process delay
Delay_ms ( 100 );
}
}
log_printf( &logger, "%s\r\n", current_rsp_buf );
}
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
rs2322_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
rs2322_cfg_setup( &cfg );
RS2322_MAP_MIKROBUS( cfg, MIKROBUS_1 );
rs2322_init( &rs2322, &cfg );
}
void application_task ( void )
{
#ifdef DEMO_APP_RECEIVER
rs2322_process( );
#endif
#ifdef DEMO_APP_TRANSMITER
rs2322_process( );
if ( send_data_cnt == 5 )
{
rs2322_send_command( &rs2322, TEXT_TO_SEND );
send_data_cnt = 0;
}
else
{
send_data_cnt++;
}
#endif
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:RS232