Provide clear, audible alerts in various settings with EPT-14A4005P and ATmega1284
Buzz to the future: Piezo speakers in next-gen audio signaling
Published Jul 09, 2024
Click board™
BUZZ Click
Dev. board
EasyAVR v8
Compiler
NECTO Studio
MCU
ATmega1284
Versatile and compact solution for adding audio signalization features to various electronic applications, catering to the needs of developers and engineers in different fields
A
A
Hardware Overview
How does it work?
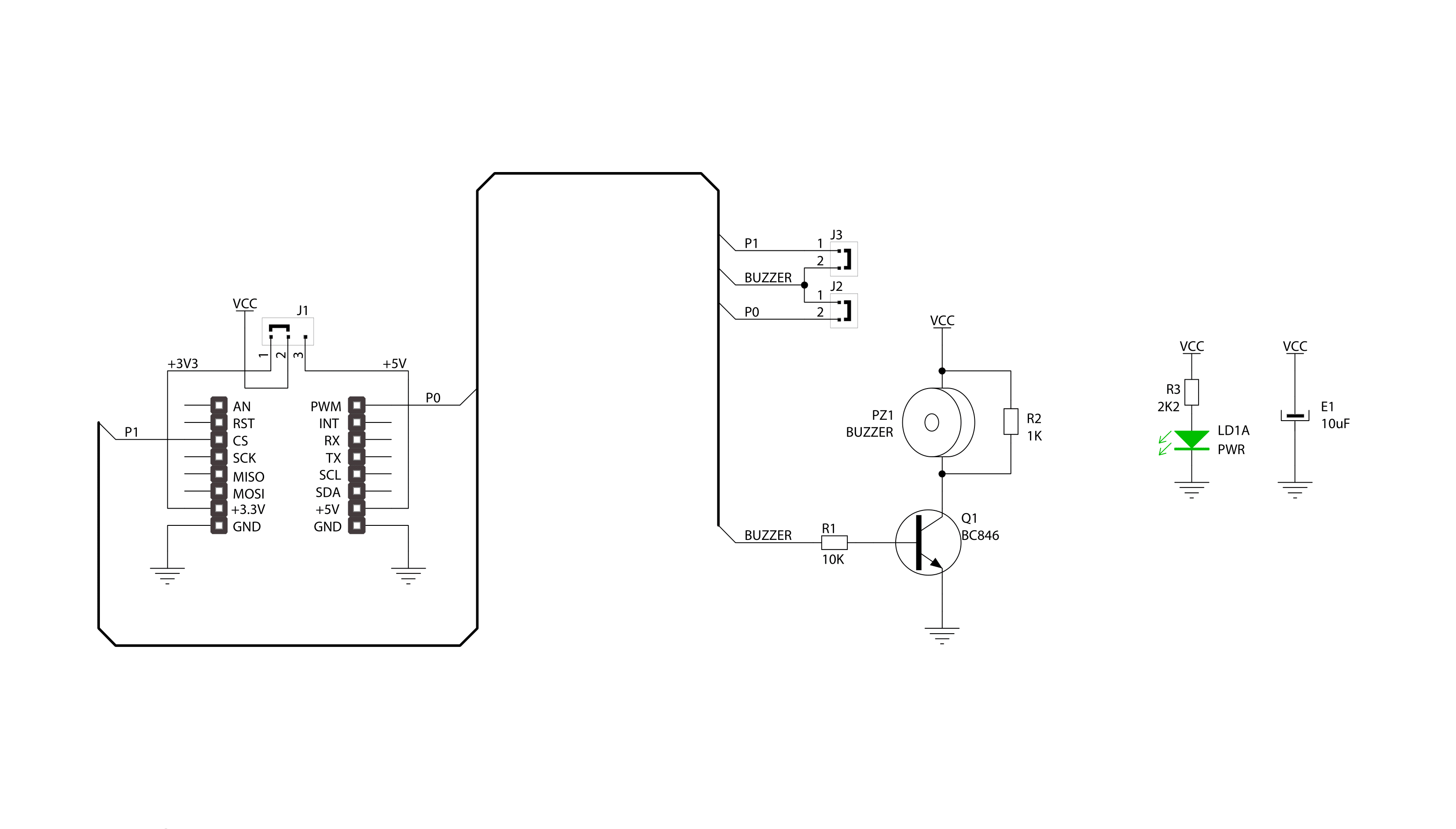
Buzz Click is based on the EPT-14A4005P, a piezoelectric transducer from Sanco Electronics. It uses a DC voltage to produce an audio signal while drawing a maximum current of 2mA from a wide operating voltage, in this case, 3.3V or 5V. As its name suggests, a piezo buzzer’s core comprises the piezoelectric ceramic element and a metal plate held together by an adhesive. When a DC is passed through, the piezoceramic element contracts and expands, which causes a vibration that produces sound waves. The buzzer has a resonant frequency of 4000Hz, at which the
buzzer vibrates, thus making a sound. The buzzer is 13.8x6.8mm in dimensions, and besides this Click board™, it can be bought separately from MIKROE. The onboard buzzer driver can be controlled by either a digital GPI pin or a PWM line of a mikroBUS™ socket. Users can create a sound using the Sound library supported in MIKROE compilers or utilize the microcontroller’s internal PWM module to generate the signal for the buzzer. Signal frequency determines the sound pitch, and the duty cycle determines the amplitude (sound volume). Both GPI and PWM lines are connected to
the buzzer by default. The user can separate one of the lines by removing the corresponding jumper (J2 or J3). This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the PWR SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
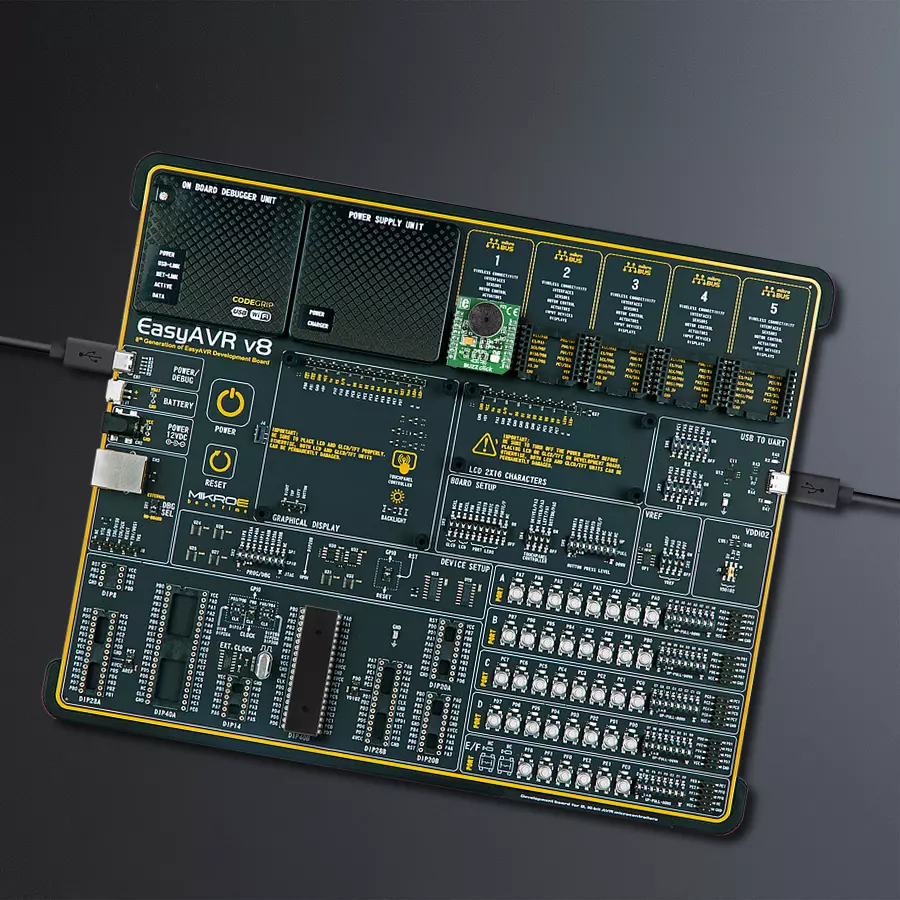
Development board
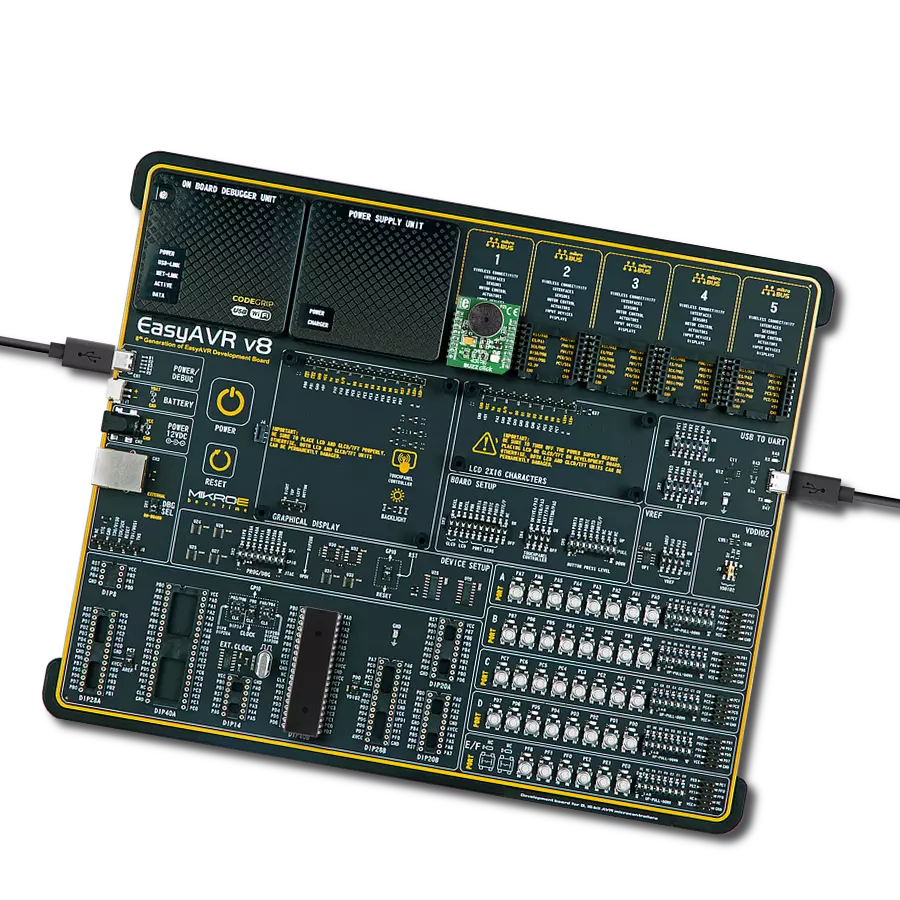
EasyAVR v8 is a development board designed to rapidly develop embedded applications based on 8-bit AVR microcontrollers (MCUs). Redesigned from the ground up, EasyAVR v8 offers a familiar set of standard features, as well as some new and unique features standard for the 8th generation of development boards: programming and debugging over the WiFi network, connectivity provided by USB-C connectors, support for a wide range of different MCUs, and more. The development board is designed so that the developer has everything that might be needed for the application development, following the Swiss Army knife concept: a highly advanced programmer/debugger module, a reliable power supply module, and a USB-UART connectivity option. EasyAVR v8 board offers several different DIP sockets, covering a wide range of 8-bit AVR MCUs, from the smallest
AVR MCU devices with only eight pins, all the way up to 40-pin "giants". The development board supports the well-established mikroBUS™ connectivity standard, offering five mikroBUS™ sockets, allowing access to a huge base of Click boards™. EasyAVR v8 offers two display options, allowing even the basic 8-bit AVR MCU devices to utilize them and display graphical or textual content. One of them is the 1x20 graphical display connector, compatible with the familiar Graphical Liquid Crystal Display (GLCD) based on the KS108 (or compatible) display driver, and EasyTFT board that contains TFT Color Display MI0283QT-9A, which is driven by ILI9341 display controller, capable of showing advanced graphical content. The other option is the 2x16 character LCD module, a four-bit display module with an embedded character-based display controller. It
requires minimal processing power from the host MCU for its operation. There is a wide range of useful interactive options at the disposal: high-quality buttons with selectable press levels, LEDs, pull-up/pulldown DIP switches, and more. All these features are packed on a single development board, which uses innovative manufacturing technologies, delivering a fluid and immersive working experience. The EasyAVR v8 development board is also integral to the MIKROE rapid development ecosystem. Natively supported by the MIKROE Software toolchain, backed up by hundreds of different Click board™ designs with their number growing daily, it covers many different prototyping and development aspects, thus saving precious development time.

Microcontroller Overview
MCU Card / MCU
Architecture
AVR
MCU Memory (KB)
128
Silicon Vendor
Microchip
Pin count
40
RAM (Bytes)
16384
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the EasyAVR v8 as your development board.












Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for BUZZ Click driver.
Key functions:
buzz_set_duty_cycle- This function sets the PWM duty cycle in percentages ( Range[ 0..1 ])buzz_pwm_stop- This function stops the PWM moudle outputbuzz_pwm_start- This function starts the PWM moudle outputbuzz_play_sound- This function plays sound on buzzer
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief BUZZ Click example
*
* # Description
* This example demonstrates the use of Buzz Click boards.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and logger.
*
* ## Application Task
* Plays the Imperial March melody. Also logs an appropriate message on the USB UART.
*
* ## Additional Functions
* imperial_march( void ) - this function plays the Imperial March melody.
*
* @note
* The minimal PWM Clock frequency required for this example is the frequency of tone C6 - 1047 Hz.
* So, in order to run this example and play all tones correctly, the user will need to decrease
* the MCU's main clock frequency in MCU Settings for the certain architectures
* in order to get the required PWM clock frequency.
*
* @author Stefan Ilic
*
*/
#include "board.h"
#include "log.h"
#include "buzz.h"
#define W 4*Q // Whole 4/4 - 4 Beats
#define H 2*Q // Half 2/4 - 2 Beats
#define Q 250 // Quarter 1/4 - 1 Beat
#define E Q/2 // Eighth 1/8 - 1/2 Beat
#define S Q/4 // Sixteenth 1/16 - 1/4 Beat
#define VOLUME 100 // goes up to 1000
static buzz_t buzz;
static log_t logger;
static void imperial_march( ) {
buzz_play_sound( &buzz, BUZZ_NOTE_A6, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_A6, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_A6, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_F6, VOLUME, E + S );
Delay_ms ( 1 + E + S );
buzz_play_sound( &buzz, BUZZ_NOTE_C7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_A6, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_F6, VOLUME, E + S );
Delay_ms ( 1 + E + S );
buzz_play_sound( &buzz, BUZZ_NOTE_C7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_A6, VOLUME, H );
Delay_ms ( 1 + H );
buzz_play_sound( &buzz, BUZZ_NOTE_E7, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_E7, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_E7, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_F7, VOLUME, E + S );
Delay_ms ( 1 + E + S );
buzz_play_sound( &buzz, BUZZ_NOTE_C7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_Ab6, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_F6, VOLUME, E + S );
Delay_ms ( 1 + E + S );
buzz_play_sound( &buzz, BUZZ_NOTE_C7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_A6, VOLUME, H );
Delay_ms ( 1 + H );
buzz_play_sound( &buzz, BUZZ_NOTE_A7, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_A6, VOLUME, E + S );
Delay_ms ( 1 + E + S );
buzz_play_sound( &buzz, BUZZ_NOTE_A6, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_A7, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_Ab7, VOLUME, E + S );
Delay_ms ( 1 + E + S );
buzz_play_sound( &buzz, BUZZ_NOTE_G7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_Gb7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_E7, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_F7, VOLUME, E );
Delay_ms ( 1 + E );
Delay_ms ( 1 + E );
buzz_play_sound( &buzz, BUZZ_NOTE_Bb6, VOLUME, E );
Delay_ms ( 1 + E );
buzz_play_sound( &buzz, BUZZ_NOTE_Eb7, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_D7, VOLUME, E + S );
Delay_ms ( 1 + E + S );
buzz_play_sound( &buzz, BUZZ_NOTE_Db7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_C7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_B6, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_C7, VOLUME, E );
Delay_ms ( 1 + E );
Delay_ms ( 1 + E );
buzz_play_sound( &buzz, BUZZ_NOTE_F6, VOLUME, E );
Delay_ms ( 1 + E );
buzz_play_sound( &buzz, BUZZ_NOTE_Ab6, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_F6, VOLUME, E + S );
Delay_ms ( 1 + E + S );
buzz_play_sound( &buzz, BUZZ_NOTE_A6, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_C7, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_A6, VOLUME, E + S );
Delay_ms ( 1 + E + S );
buzz_play_sound( &buzz, BUZZ_NOTE_C7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_E7, VOLUME, H );
Delay_ms ( 1 + H );
buzz_play_sound( &buzz, BUZZ_NOTE_A7, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_A6, VOLUME, E + S );
Delay_ms ( 1 + E + S );
buzz_play_sound( &buzz, BUZZ_NOTE_A6, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_A7, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_Ab7, VOLUME, E + S );
Delay_ms ( 1 + E + S );
buzz_play_sound( &buzz, BUZZ_NOTE_G7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_Gb7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_E7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_F7, VOLUME, E );
Delay_ms ( 1 + E );
Delay_ms ( 1 + E );
buzz_play_sound( &buzz, BUZZ_NOTE_Bb6, VOLUME, E );
Delay_ms ( 1 + E );
buzz_play_sound( &buzz, BUZZ_NOTE_Eb7, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_D7, VOLUME, E + S );
Delay_ms ( 1 + E + S );
buzz_play_sound( &buzz, BUZZ_NOTE_Db7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_C7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_B6, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_C7, VOLUME, E );
Delay_ms ( 1 + E );
Delay_ms ( 1 + E );
buzz_play_sound( &buzz, BUZZ_NOTE_F6, VOLUME, E );
Delay_ms ( 1 + E );
buzz_play_sound( &buzz, BUZZ_NOTE_Ab6, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_F6, VOLUME, E + S );
Delay_ms ( 1 + E + S );
buzz_play_sound( &buzz, BUZZ_NOTE_C7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_A6, VOLUME, Q );
Delay_ms ( 1 + Q );
buzz_play_sound( &buzz, BUZZ_NOTE_F6, VOLUME, E + S );
Delay_ms ( 1 + E + S );
buzz_play_sound( &buzz, BUZZ_NOTE_C7, VOLUME, S );
Delay_ms ( 1 + S );
buzz_play_sound( &buzz, BUZZ_NOTE_Ab6, VOLUME, H );
Delay_ms ( 1 + H );
}
void application_init ( void ) {
log_cfg_t log_cfg; /**< Logger config object. */
buzz_cfg_t buzz_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
buzz_cfg_setup( &buzz_cfg );
BUZZ_MAP_MIKROBUS( buzz_cfg, MIKROBUS_1 );
err_t init_flag = buzz_init( &buzz, &buzz_cfg );
if ( init_flag == PWM_ERROR ) {
log_error( &logger, " Application Init Error. " );
log_info( &logger, " Please, run program again... " );
for ( ; ; );
}
buzz_set_duty_cycle ( &buzz, 0.0 );
buzz_pwm_start( &buzz );
log_info( &logger, " Application Task " );
}
void application_task ( void ) {
log_printf( &logger, "Playing the Imperial March melody ...\r\n" );
imperial_march( );
// 10 seconds delay
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END