Create whisper-quiet operation of your DC motor with TB9051FTG and STM32F031K6
Powerful portable motor control

Published Oct 01, 2024
Click board™
DC Motor 18 Click
Dev. board
Nucleo 32 with STM32F031K6 MCU
Compiler
NECTO Studio
MCU
STM32F031K6
Optimize your motors, maximize efficiency, and engineer with confidence. Embrace brushed motor control up to 5A of current!
A
A
Hardware Overview
How does it work?
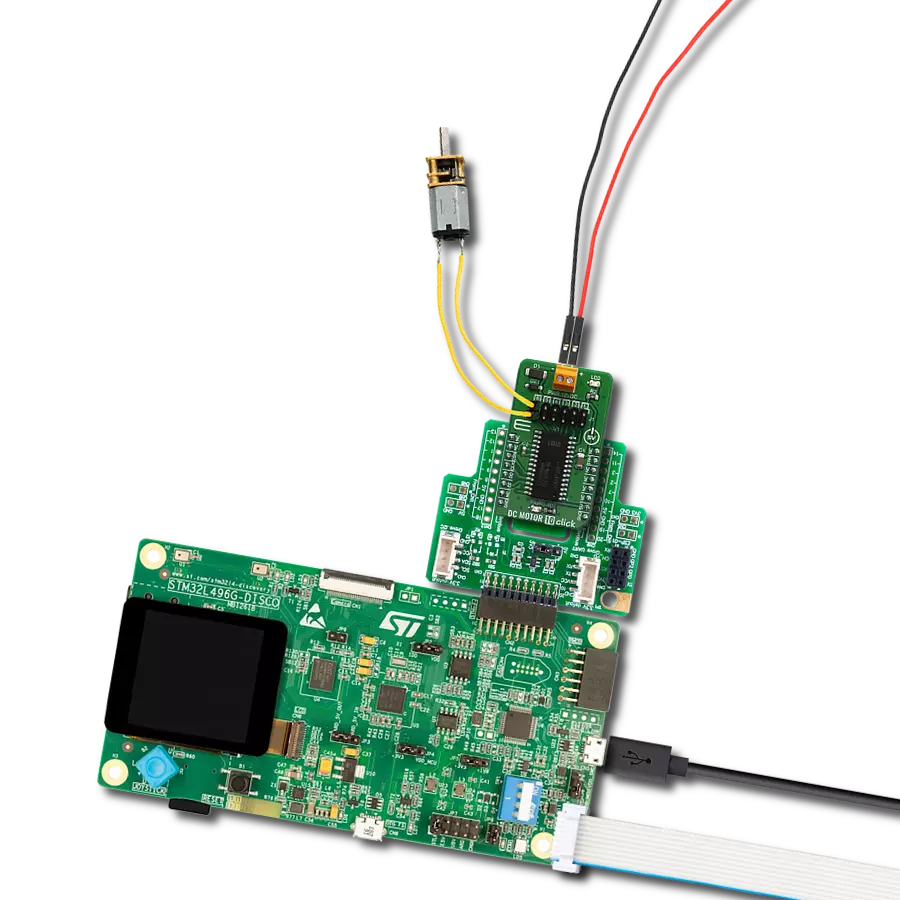
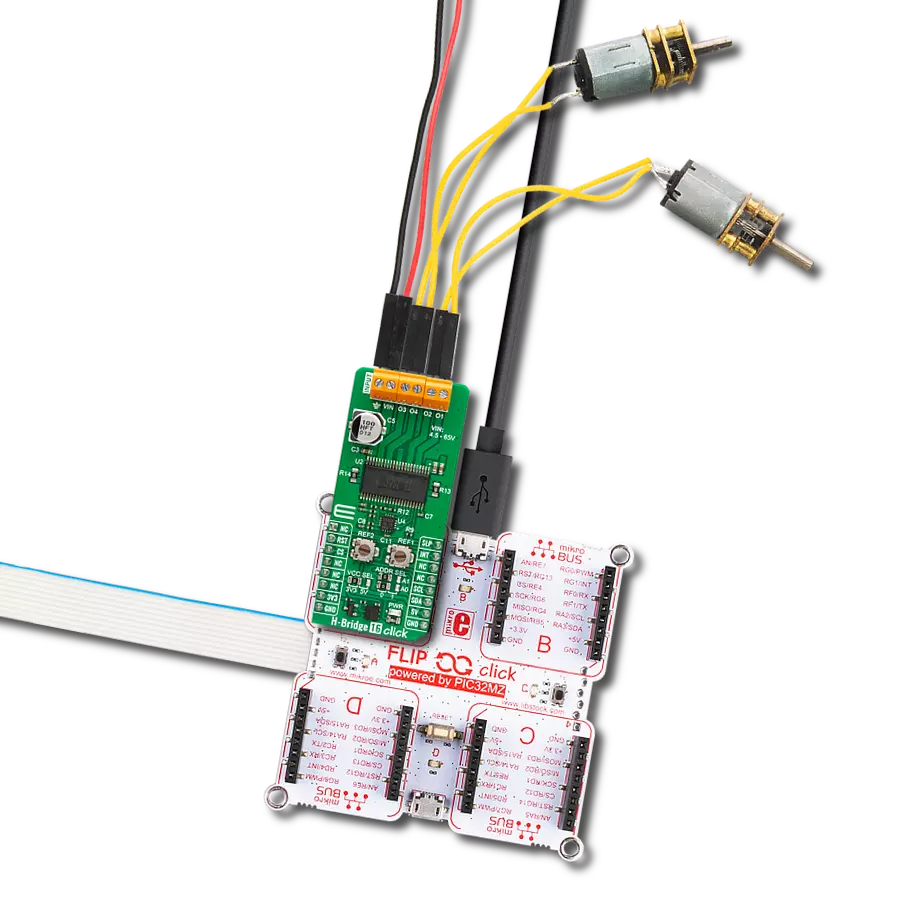
DC Motor 18 Click is based on the TB9051FTG, a motor driver incorporating the output driver for the direct drive of a DC brushed motor intended for automotive use from Toshiba Semiconductor. While primarily targeting vehicle engine applications, such as electronic throttle and valve control, the TB9051FTG can also be suitable for controlling onboard systems operating at up to 5A, such as control of wing mirrors and trunk locks. Control functions include motor-related (forward, reverse, brake), PWM control, current limit control, H-side current monitor, diagnosis output, and built-in detection circuits for overcurrent, overheat, and low/high voltage. DC Motor 18 Click communicates with MCU using several GPIO pins. The Enable pin, labeled as EN and routed to the CS pin of the mikroBUS™ socket, optimizes power consumption and is used for power ON/OFF purposes (driver operation permission). The
Forward/Reverse/Brake mode can be selected according to PWM control signals routed to the PWN and RST pins of the mikroBUS™ socket. The current, which flows to the high side in the H-bridge of motor-driven output, is monitored in real time, where the user can select the way of the current monitoring. In the case of a 5V VCC power supply, the current can be monitored using an AN pin on the mikroBUS™ socket. In the case of a lesser power supply (3.3V), monitoring is possible with the help of an added voltage divider between the OCM pin and GND. Selection can be performed by onboard SMD jumper labeled as ADC SEL. This Click board™ also has an additional LED for anomaly indication. Suppose a state such as an overtemperature or overcurrent/under voltage is detected. In that case, such anomaly is indicated by a red LED marked as DIAG, which is also connected to the interrupt INT pin through
which the user can also monitor the state of the diagnostic pin. In addition, the motor control output can be controlled at the time of the overcurrent detection, which is realized through an onboard switch labeled as OCC. This switch judges whether the motor control output is ON(1) or OFF(0). This board supports an external power supply for the TB9051FTG, which can be connected to the input terminal labeled as VM within the range of 4.5V to 28V, while the DC motor coils can be connected to the terminals labeled as OUT1 and OUT2. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. The Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used, as a reference, for further development.

Features overview
Development board
Nucleo 32 with STM32F031K6 MCU board provides an affordable and flexible platform for experimenting with STM32 microcontrollers in 32-pin packages. Featuring Arduino™ Nano connectivity, it allows easy expansion with specialized shields, while being mbed-enabled for seamless integration with online resources. The
board includes an on-board ST-LINK/V2-1 debugger/programmer, supporting USB reenumeration with three interfaces: Virtual Com port, mass storage, and debug port. It offers a flexible power supply through either USB VBUS or an external source. Additionally, it includes three LEDs (LD1 for USB communication, LD2 for power,
and LD3 as a user LED) and a reset push button. The STM32 Nucleo-32 board is supported by various Integrated Development Environments (IDEs) such as IAR™, Keil®, and GCC-based IDEs like AC6 SW4STM32, making it a versatile tool for developers.

Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M0
MCU Memory (KB)
32
Silicon Vendor
STMicroelectronics
Pin count
32
RAM (Bytes)
4096
You complete me!
Accessories
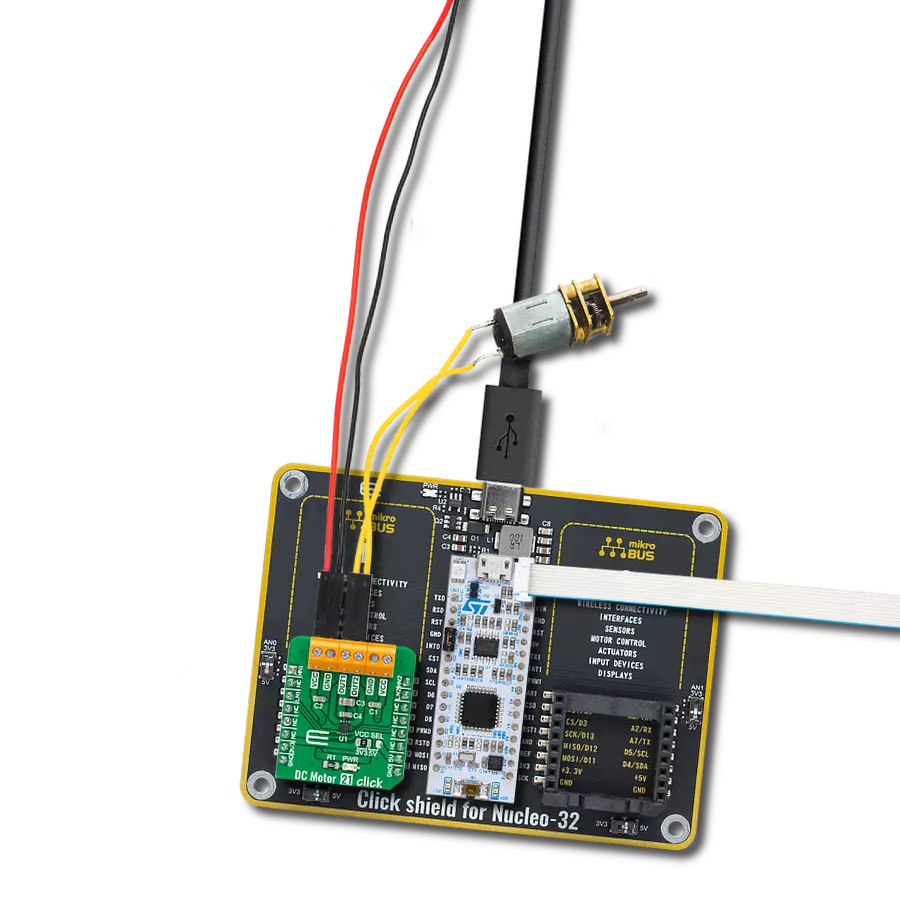
Click Shield for Nucleo-32 is the perfect way to expand your development board's functionalities with STM32 Nucleo-32 pinout. The Click Shield for Nucleo-32 provides two mikroBUS™ sockets to add any functionality from our ever-growing range of Click boards™. We are fully stocked with everything, from sensors and WiFi transceivers to motor control and audio amplifiers. The Click Shield for Nucleo-32 is compatible with the STM32 Nucleo-32 board, providing an affordable and flexible way for users to try out new ideas and quickly create prototypes with any STM32 microcontrollers, choosing from the various combinations of performance, power consumption, and features. The STM32 Nucleo-32 boards do not require any separate probe as they integrate the ST-LINK/V2-1 debugger/programmer and come with the STM32 comprehensive software HAL library and various packaged software examples. This development platform provides users with an effortless and common way to combine the STM32 Nucleo-32 footprint compatible board with their favorite Click boards™ in their upcoming projects.

DC Gear Motor - 430RPM (3-6V) represents an all-in-one combination of a motor and gearbox, where the addition of gear leads to a reduction of motor speed while increasing the torque output. This gear motor has a spur gearbox, making it a highly reliable solution for applications with lower torque and speed requirements. The most critical parameters for gear motors are speed, torque, and efficiency, which are, in this case, 520RPM with no load and 430RPM at maximum efficiency, alongside a current of 60mA and a torque of 50g.cm. Rated for a 3-6V operational voltage range and clockwise/counterclockwise rotation direction, this motor represents an excellent solution for many functions initially performed by brushed DC motors in robotics, medical equipment, electric door locks, and much more.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
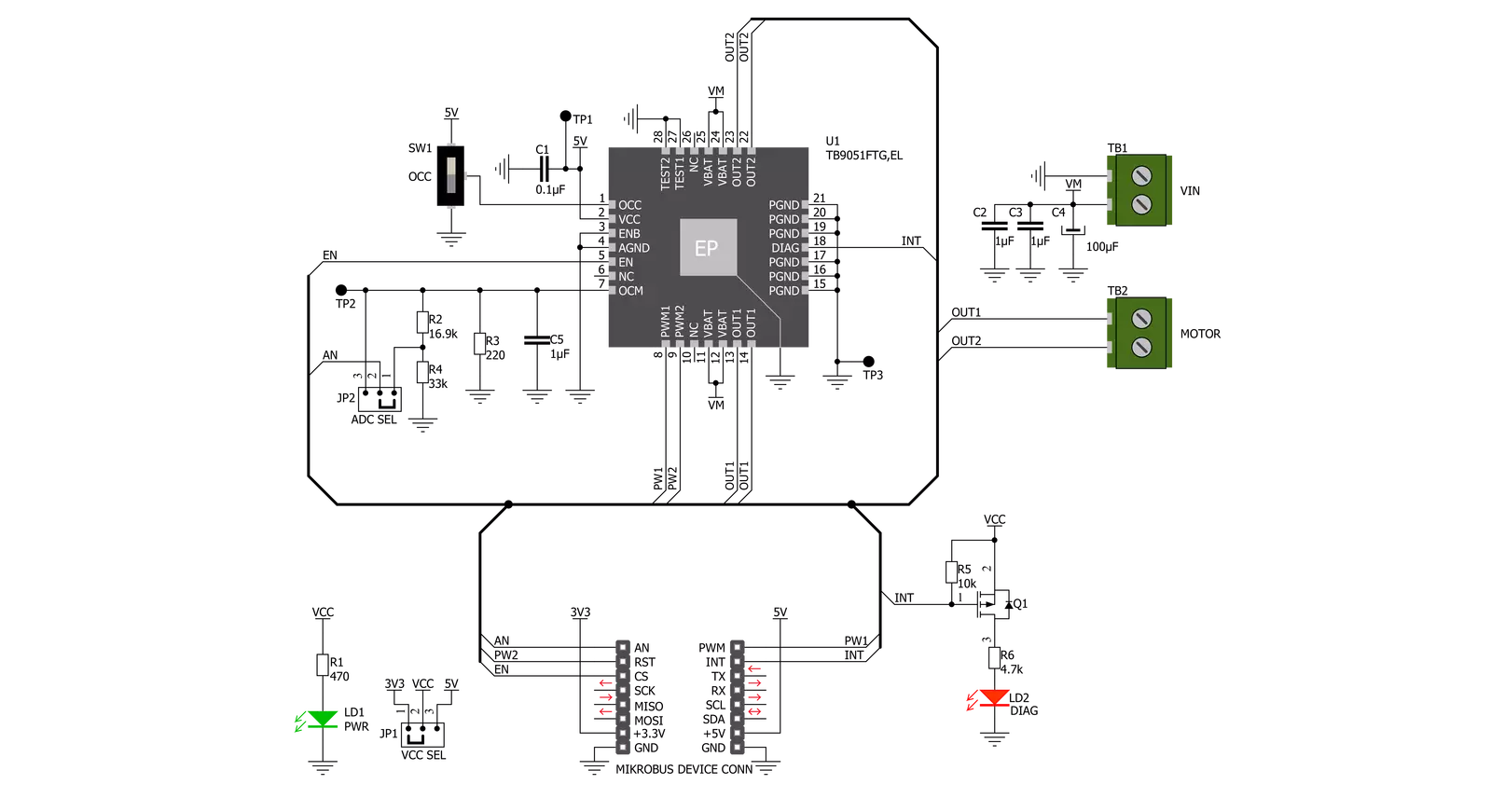
Click board™ Schematic
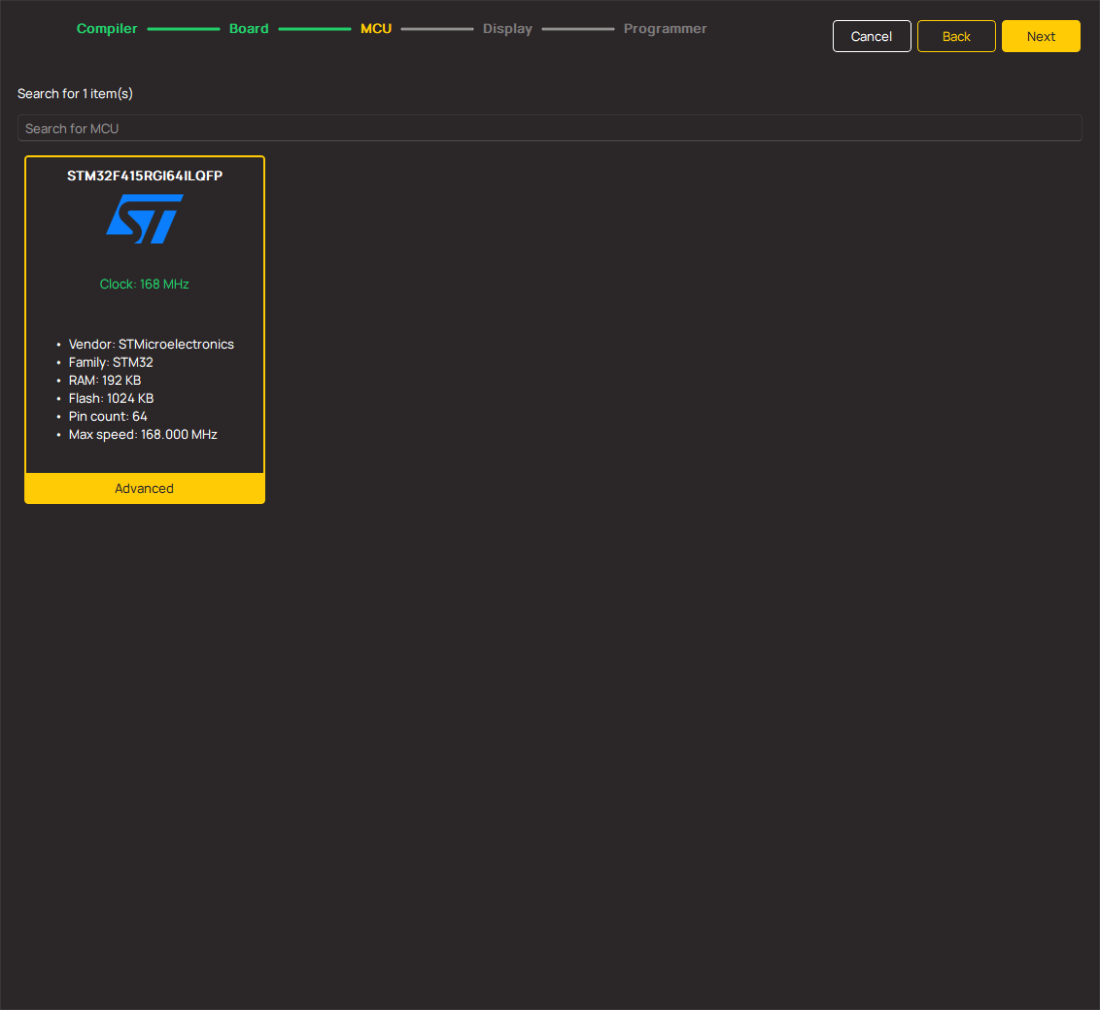
Step by step
Project assembly

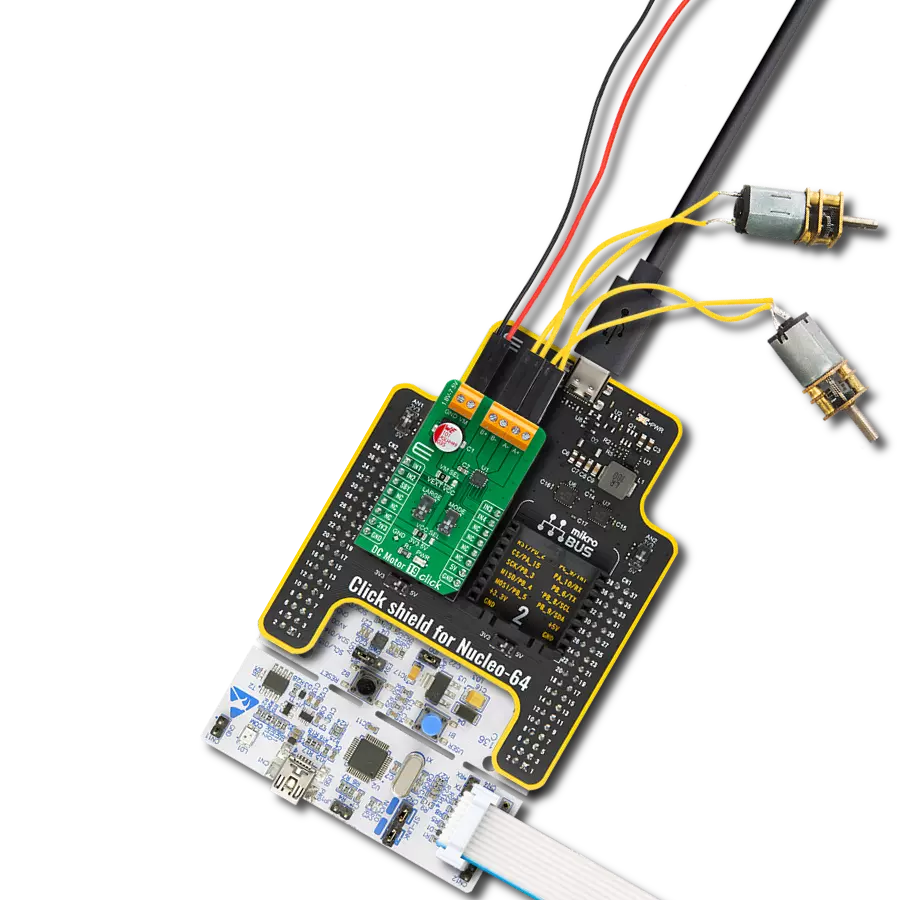
Start by selecting your development board and Click board™. Begin with the Nucleo 32 with STM32F031K6 MCU as your development board.














Software Support
Library Description
This library contains API for DC Motor 18 Click driver.
Key functions:
dcmotor18_set_speed_percentage- Set speed output percentagedcmotor18_set_enable- Set enable pin statedcmotor18_read_an_pin_current- Read AN pin current
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief DCMotor18 Click example
*
* # Description
* This example application showcases ability of Click
* board to control DC motors using PWM modulation in
* both directions and different speeds.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization of MCU communication modules (PWM, ADC, UART)
* and additioal gpio for control of the device. Then sets
* default configuration that enables device to control the DC motor.
*
* ## Application Task
* Drives motor in one direction from 0 to 100% of the speed using
* PWM, and then returns it back to 0. Then changes the rotation
* direction and repeats the process of increasing and decreasing
* acceleration.
*
* @author Luka Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "dcmotor18.h"
static dcmotor18_t dcmotor18;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
dcmotor18_cfg_t dcmotor18_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
dcmotor18_cfg_setup( &dcmotor18_cfg );
DCMOTOR18_MAP_MIKROBUS( dcmotor18_cfg, MIKROBUS_1 );
err_t init_flag = dcmotor18_init( &dcmotor18, &dcmotor18_cfg );
if ( PWM_ERROR == init_flag )
{
log_error( &logger, " Application Init Error. " );
log_info( &logger, " Please, run program again... " );
for ( ; ; );
}
dcmotor18_default_cfg ( &dcmotor18 );
log_info( &logger, " Application Task " );
Delay_ms ( 500 );
}
void application_task ( void )
{
static int8_t duty_cnt = 1;
static int8_t duty_inc = 1;
float speed = duty_cnt / 10.0;
static uint8_t direction = 1;
dcmotor18_set_direction( &dcmotor18, direction );
dcmotor18_set_speed_percentage ( &dcmotor18, speed );
if ( dcmotor18.direction )
{
log_printf( &logger, "<<< " );
}
else
{
log_printf( &logger, ">>> " );
}
log_printf( &logger, "Speed: %d%%\r\n", ( uint16_t )( duty_cnt * 10 ) );
if ( 10 == duty_cnt )
{
duty_inc = -1;
}
else if ( 0 == duty_cnt )
{
duty_inc = 1;
direction = !direction;
}
duty_cnt += duty_inc;
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Brushed