通过TB67H481FNG和ATmega644体验动力与优雅的完美融合
为未来的运动提供动力

已发布 6月 26, 2024
点击板
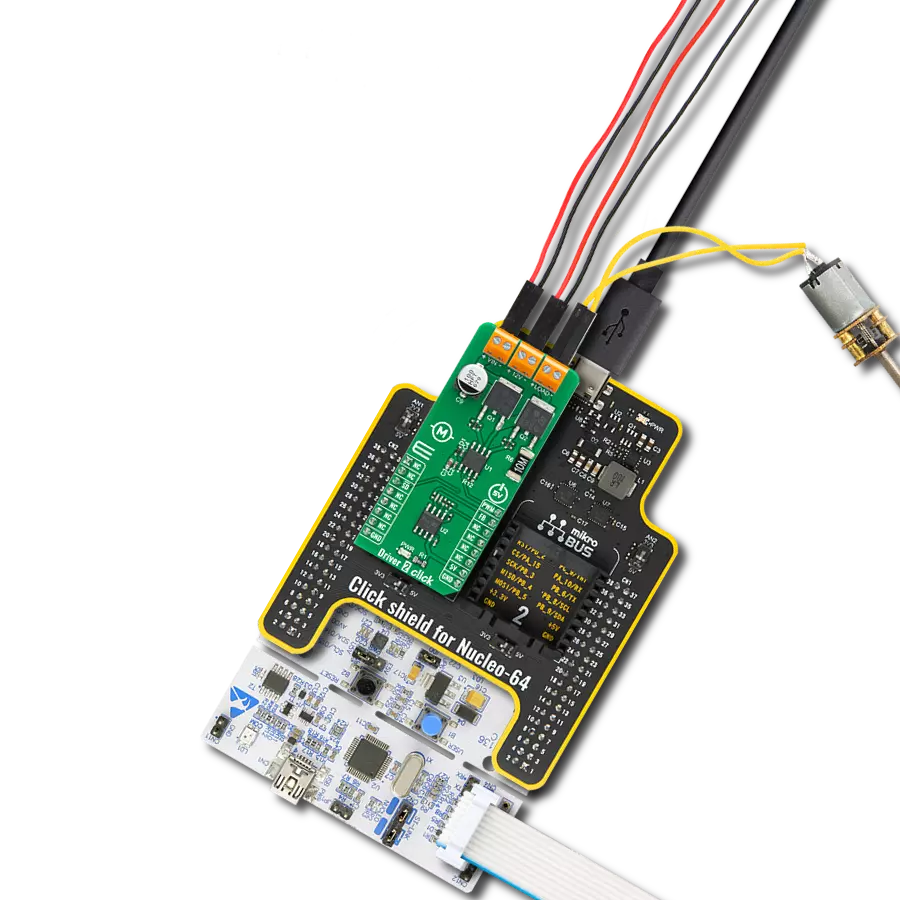
DC Motor 13 Click
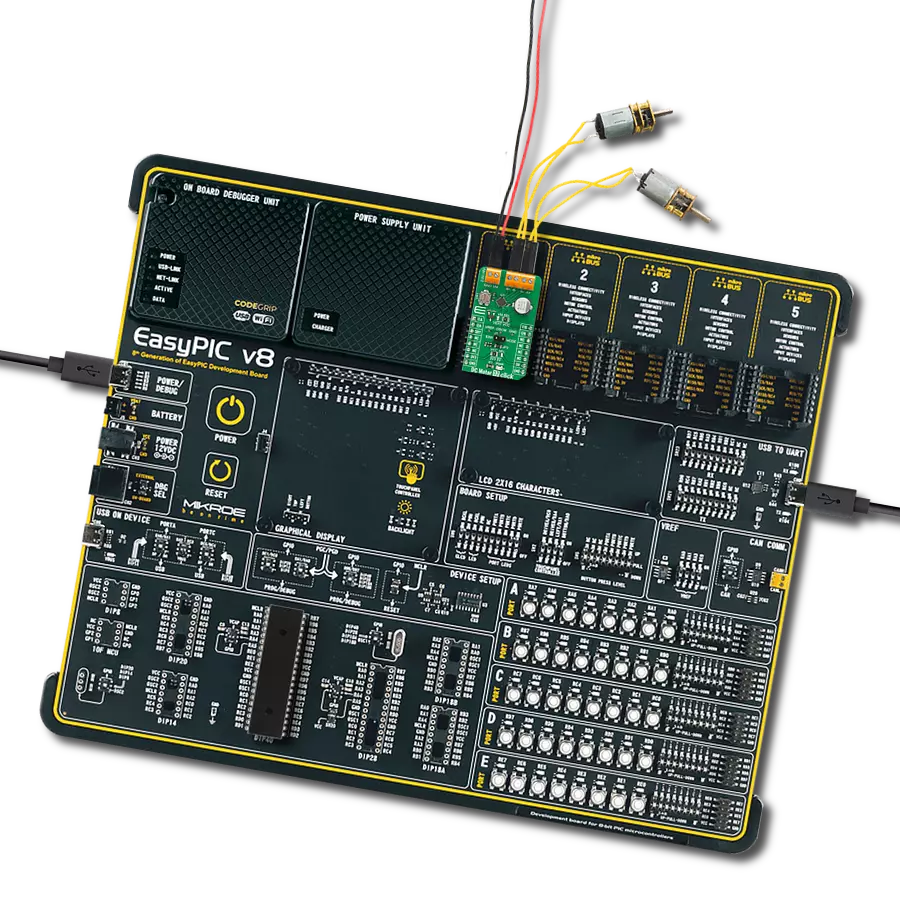
开发板
EasyAVR v7
编译器
NECTO Studio
微控制器单元
ATmega644
提升你的工程事业,使用我们的直流电机驱动器,这是一个精心打造的解决方案,为你的项目带来效率、精度和创新。
A
A
硬件概览
它是如何工作的?
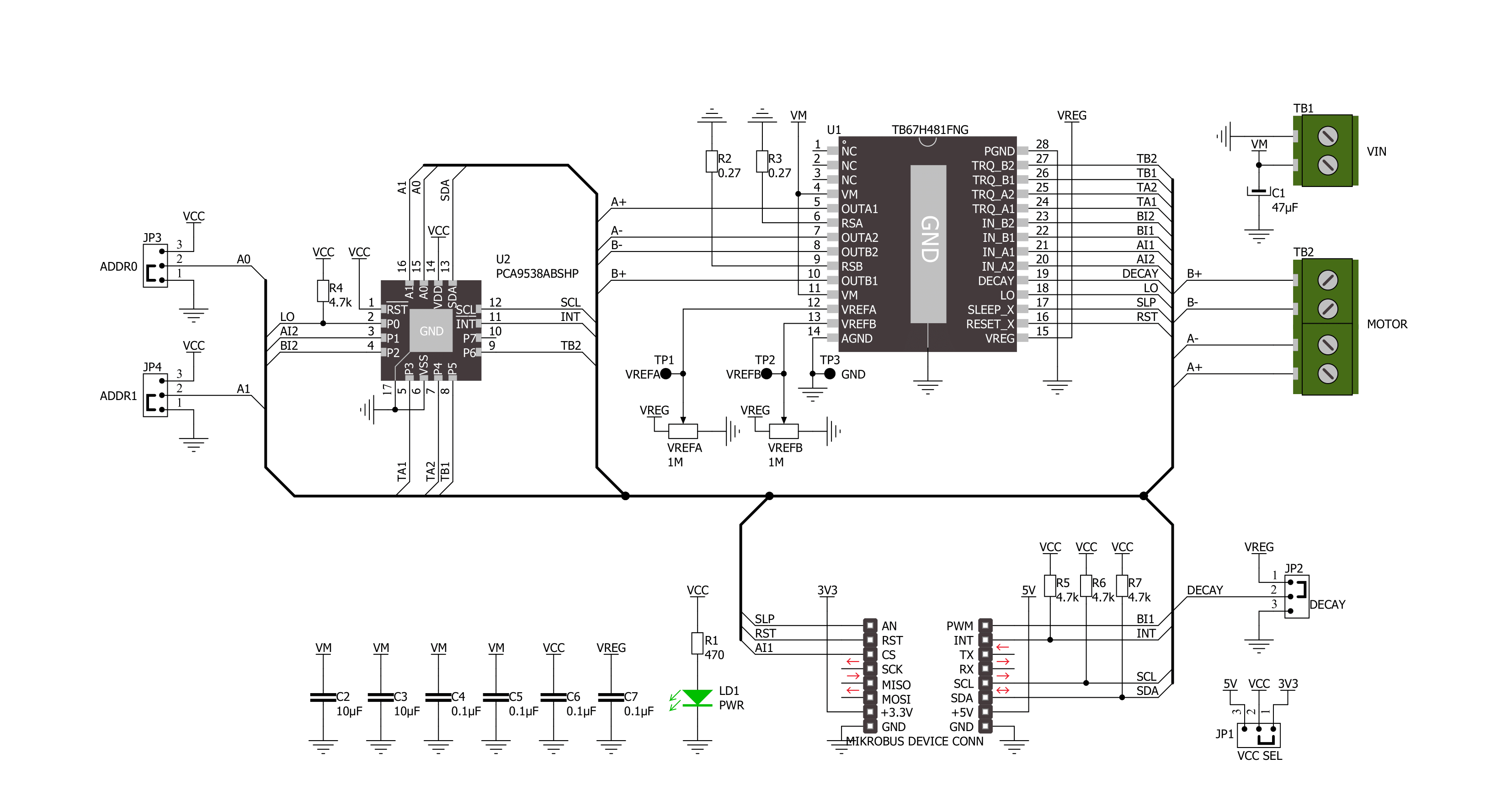
DC Motor 13 Click是基于东芝半导体的TB67H481FNG设计的,它是一款双通道、H桥、刷式直流电机驱动器。TB67H481FNG具有电流限制功能,监测电机中的电流并执行恒定电流PWM控制。当电机电流达到通过板载VREF调节器(VREFA和VREFB)确定的设定电流值时,TB67H481FNG将转换到衰减模式并注释电流。可以通过将标有DECAY的SMD跳线器定位到标有0和1的适当位置来选择各种衰减模式功能。此外,通过为板上的JP2跳线器去除,还可以选择混合衰减模式。TB67H481FNG具有内置调节器,可使电机由单一电源驱动,提供约40V的电机输出电压评级,并具有诸如过流、过温和欠压锁定等综合保护
机制,用于错误检测。设置电流值可以通过扭矩功能(100%、71%、38%或0%)进行调整,通过PCA9538A端口扩展器进行控制,该扩展器通过I2C串行接口与MCU建立通信。当不需要高扭矩时,降低扭矩设置可以抑制电机电流。除了这些扭矩设置引脚外,借助扩展器,还可以控制其他一些信号,例如用于选择电机驱动器操作模式的控制信号。这些引脚与AI1和BI1引脚一起,路由到mikroBUS™插座的CS和PWM引脚的默认位置,可以启用CW、CCW或短路刹车等操作模式。PCA9538A还允许通过将标有ADDR SEL的SMD跳线器定位到标有0和1的适当位置来选择其I2C从地址的最低有效位(LSB),并将其中断特性路由到
mikroBUS™插座的INT引脚。此外,可以使用路由到mikroBUS™插座的AN引脚的默认位置的Sleep功能停止所有电路,并启用省电模式,而RST引脚提供通用复位功能。DC Motor 13 Click支持连接到标有VM的输入端子的TB67H481FNG的外部电源,该电源应在8.2V至44V的范围内,而两个刷式电机或一个步进电机线圈可以连接到标有B+、B-、A-和A+的端子上。此Click板可以通过VCC SEL跳线器选择3.3V或5V逻辑电压电平运行。这样,既支持3.3V又支持5V的MCU可以正确使用通信线路。此外,该Click板配备了一个包含易于使用的函数和示例代码的库,可用作进一步开发的参考。

功能概述
开发板
EasyAVR v7 是第七代AVR开发板,专为快速开发嵌入式应用的需求而设计。它支持广泛的16位AVR微控制器,来自Microchip,并具有一系列独特功能,如强大的板载mikroProg程序员和通过USB的在线电路调试器。开发板布局合理,设计周到,使得最终用户可以在一个地方找到所有必要的元素,如开关、按钮、指示灯、连接器等。EasyAVR v7 通过每个端口的四种不同连接器,比以往更高效地连接附件板、传感器和自定义电子产品。EasyAVR v7 开发板的每个部分
都包含了使同一板块运行最高效的必要组件。一个集成的mikroProg,一个快速的USB 2.0程序员,带有mikroICD硬件在线电路调试器,提供许多有价值的编 程/调试选项和与Mikroe软件环境的无缝集成。除此之外,它还包括一个干净且调节过的开发板电源供应模块。它可以使用广泛的外部电源,包括外部12V电源供应,7-12V交流或9-15V直流通过DC连接器/螺丝端子,以及通过USB Type-B(USB-B)连接器的电源。通信选项如USB-UART和RS-232也包括在内,与
广受好评的mikroBUS™标准、三种显示选项(7段、图形和基于字符的LCD)和几种不同的DIP插座一起,覆盖了广泛的16位AVR MCU。EasyAVR v7 是Mikroe快速开发生态系统的一个组成部分。它由Mikroe软件工具原生支持,得益于大量不同的Click板™(超过一千块板),其数量每天都在增长,它涵盖了原型制作和开发的许多方面。

微控制器概述
MCU卡片 / MCU
建筑
AVR
MCU 内存 (KB)
64
硅供应商
Microchip
引脚数
40
RAM (字节)
4096
你完善了我!
配件
DC齿轮电机 - 430转/分钟(3-6V)代表了电机和齿轮箱的全合一组合,齿轮的添加导致了电机速度的降低,同时增加了扭矩输出。这种齿轮电机具有齿轮箱,使其成为适用于扭矩和速度要求较低的应用的高度可靠解决方案。齿轮电机的最关键参数是速度、扭矩和效率,在这种情况下,无负载时的速度为520转/分钟,最大效率时为430转/分钟,电流为60毫安,扭矩为50克•厘米。额定工作电压范围为3-6V,顺时针/逆时针旋转方向,这种电机是机器人技术、医疗设备、电动门锁等领域最初由刷式直流电机执行的许多功能的出色解决方案。

使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
Click board™ 原理图
一步一步来
项目组装

从选择您的开发板和Click板™开始。以EasyAVR v7作为您的开发板开始。















实时跟踪您的结果
应用程序输出
1. 应用程序输出 - 在调试模式下,“应用程序输出”窗口支持实时数据监控,直接提供执行结果的可视化。请按照提供的教程正确配置环境,以确保数据正确显示。

2. UART 终端 - 使用UART Terminal通过USB to UART converter监视数据传输,实现Click board™与开发系统之间的直接通信。请根据项目需求配置波特率和其他串行设置,以确保正常运行。有关分步设置说明,请参考提供的教程。

3. Plot 输出 - Plot功能提供了一种强大的方式来可视化实时传感器数据,使趋势分析、调试和多个数据点的对比变得更加直观。要正确设置,请按照提供的教程,其中包含使用Plot功能显示Click board™读数的分步示例。在代码中使用Plot功能时,请使用以下函数:plot(insert_graph_name, variable_name);。这是一个通用格式,用户需要将“insert_graph_name”替换为实际图表名称,并将“variable_name”替换为要显示的参数。

软件支持
库描述
该库包含 DC Motor 13 Click 驱动程序的 API。
关键功能:
dcmotor13_set_outa_mode- 这个函数设置OUTA模式。dcmotor13_set_outb_mode- 这个函数设置OUTB模式。dcmotor13_set_outa_torque- 这个函数设置OUTA扭矩。
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* @file main.c
* @brief DCMotor13 Click example
*
* # Description
* This example demonstrates the use of DC Motor 13 click board by driving the motors
* in both direction in the span of 9 seconds.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and performs the click default configuration which sets the output
* torque to 100%.
*
* ## Application Task
* Drives the motors in the clockwise direction, then switches to the counter-clockwise direction,
* and after that pulls the motors brake with a 3 seconds delay after each change.
* Each step will be logged on the USB UART where you can track the program flow.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "dcmotor13.h"
static dcmotor13_t dcmotor13;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
dcmotor13_cfg_t dcmotor13_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
dcmotor13_cfg_setup( &dcmotor13_cfg );
DCMOTOR13_MAP_MIKROBUS( dcmotor13_cfg, MIKROBUS_1 );
if ( I2C_MASTER_ERROR == dcmotor13_init( &dcmotor13, &dcmotor13_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( DCMOTOR13_ERROR == dcmotor13_default_cfg ( &dcmotor13 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
if ( DCMOTOR13_OK == dcmotor13_set_outa_mode ( &dcmotor13, DCMOTOR13_MODE_CW ) )
{
log_printf ( &logger, " OUTA: Clockwise\r\n" );
}
if ( DCMOTOR13_OK == dcmotor13_set_outb_mode ( &dcmotor13, DCMOTOR13_MODE_CW ) )
{
log_printf ( &logger, " OUTB: Clockwise\r\n\n" );
}
Delay_ms ( 3000 );
if ( DCMOTOR13_OK == dcmotor13_set_outa_mode ( &dcmotor13, DCMOTOR13_MODE_CCW ) )
{
log_printf ( &logger, " OUTA: Counter-Clockwise\r\n" );
}
if ( DCMOTOR13_OK == dcmotor13_set_outb_mode ( &dcmotor13, DCMOTOR13_MODE_CCW ) )
{
log_printf ( &logger, " OUTB: Counter-Clockwise\r\n\n" );
}
Delay_ms ( 3000 );
if ( DCMOTOR13_OK == dcmotor13_set_outa_mode ( &dcmotor13, DCMOTOR13_MODE_SHORT_BRAKE ) )
{
log_printf ( &logger, " OUTA: Short brake\r\n" );
}
if ( DCMOTOR13_OK == dcmotor13_set_outb_mode ( &dcmotor13, DCMOTOR13_MODE_SHORT_BRAKE ) )
{
log_printf ( &logger, " OUTB: Short brake\r\n\n" );
}
Delay_ms ( 3000 );
}
void main ( void )
{
application_init( );
for ( ; ; )
{
application_task( );
}
}
// ------------------------------------------------------------------------ END