使用我们的TFmini解决方案和PIC32MZ2048EFM100轻松将LiDAR技术应用于您的未来项目
即插即用的TFmini LiDAR解决方案

已发布 6月 25, 2024
点击板
TFmini Click
开发板
Curiosity PIC32 MZ EF
编译器
NECTO Studio
微控制器单元
PIC32MZ2048EFM100
我们推出的TFmini适配器是一项革新性解决方案,旨在帮助工程师和创新者将LiDAR技术融入他们的项目,加速开发并开启距离测量的新可能性。
A
A
硬件概览
它是如何工作的?
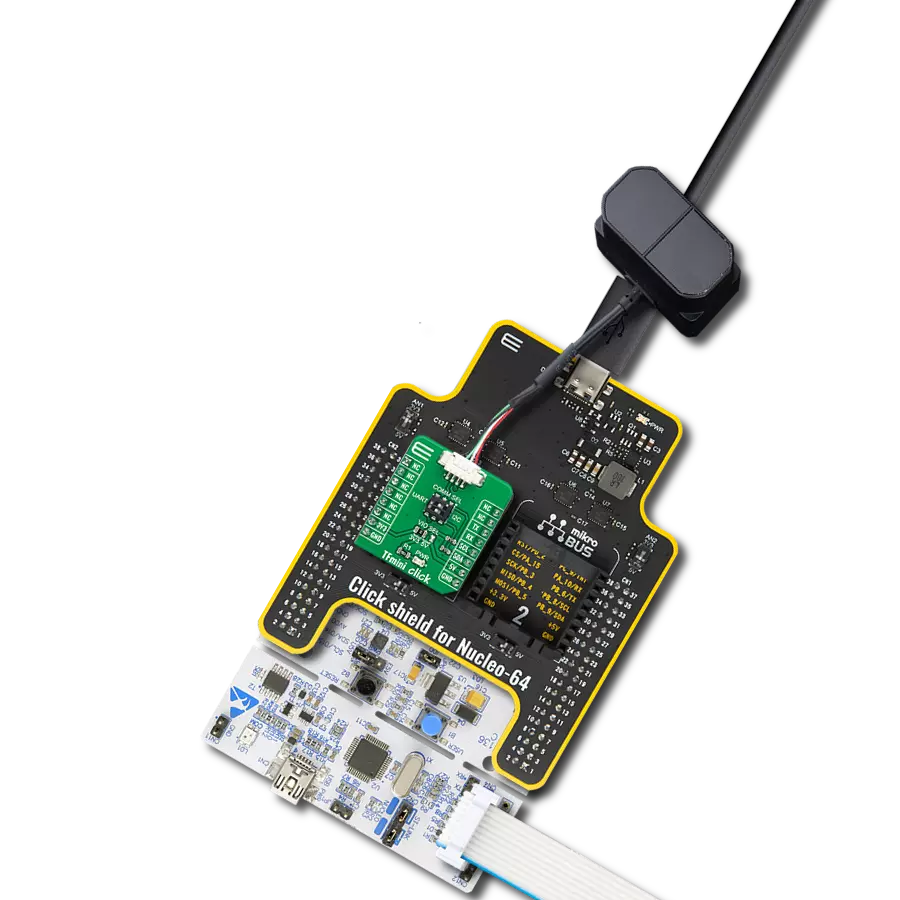
TFmini Click 是一个适配器 Click board™,简化了 TFmini LiDAR 模块与主机 MCU 的接口。这个 Click board™ 代表一个小型 PCB,像其他 Click board™ 一样连接到 mikroBUS™ 插座,使用一个 1x4 1.25mm 间距连接器用于 TFmini LiDAR 传感器连接。每个连接器引脚对应 TFmini LiDAR 传感器的引脚,允许轻松访问和操作引脚,同时始终保持完美的连接质量。这个 Click board™ 允许用户升级他们的项目,使
用能够测量到物体距离的传感器,可以实现不同的测量范围。与所有 LiDAR 传感器一样,有效检测距离会因光照条件和目标物体的反射率而有所不同。这些传感器具有 IP65 外壳等级、100Hz 帧率和 70Klux 环境光免疫,适用于各种工业环境,如行人检测、车辆测试和高度测量。TFmini Click 可以使用 UART 和 I2C 接口,默认通信协议为常用的 UART RX 和 TX 引脚,默认配置下以 115200bps 运行,以与主机 MCU
传输和交换数据。可以通过将标有 COMM SEL 的 SMD 开关定位在适当位置来选择接口。注意,所有开关位置必须在同一侧,否则 Click board™ 可能会无响应。这个 Click board™ 可以通过 VIO SEL 跳线选择 3.3V 或 5V 逻辑电压电平,从而使 3.3V 和 5V 的 MCU 都能正确使用通信线路。此外,这个 Click board™ 配备了一个包含易于使用功能的库和一个可作为进一步开发参考的示例代码。


功能概述
开发板
Curiosity PIC32 MZ EF 开发板是一个完全集成的 32 位开发平台,特点是高性能的 PIC32MZ EF 系列(PIC32MZ2048EFM),该系列具有 2MB Flash、512KB RAM、集成的浮点单元(FPU)、加密加速器和出色的连接选项。它包括一个集成的程序员和调试器,无需额外硬件。用户可以通过 MIKROE
mikroBUS™ Click™ 适配器板扩展功能,通过 Microchip PHY 女儿板添加以太网连接功能,使用 Microchip 扩展板添加 WiFi 连接能力,并通过 Microchip 音频女儿板添加音频输入和输出功能。这些板完全集成到 PIC32 强大的软件框架 MPLAB Harmony 中,该框架提供了一个灵活且模块化的接口
来应用开发、一套丰富的互操作软件堆栈(TCP-IP、USB)和易于使用的功能。Curiosity PIC32 MZ EF 开发板提供了扩展能力,使其成为连接性、物联网和通用应用中快速原型设计的绝佳选择。

微控制器概述
MCU卡片 / MCU

建筑
PIC32
MCU 内存 (KB)
2048
硅供应商
Microchip
引脚数
100
RAM (字节)
524288
你完善了我!
配件
TFmini Plus LiDAR传感器可以在没有任何问题的情况下测量距离物体近至10厘米、远至12米的距离。除了低成本、小尺寸和低功耗外,TFmini Plus还提高了帧率,使用UART接口与MCU通信,引入了IP65外壳,并优化了各种补偿算法。与所有LiDAR传感器一样,有效检测距离会因光照条件和目标物体的反射率而有所不同,但使该传感器特别之处在于其尺寸。TFmini Plus LiDAR传感器不使用激光进行测距。相反,它包含集成的LED和光学元件,因此被标记为“LiDAR”。然而,将此设备视为“飞行时间红外测距仪”(使用ToF而非三角测量来确定范围)可能更为合适。该传感器可以通过1x4 1.25mm间距连接器连接到现有的TFmini Click board™。

TFmini S LiDAR传感器可以在没有任何问题的情况下测量距离物体近至10厘米、远至12米的距离。除了低成本、小尺寸和低功耗外,TFmini S还提高了帧率,使用UART和I2C接口与MCU通信,引入了IP65外壳,并优化了各种补偿算法。与所有LiDAR传感器一样,有效检测距离会因光照条件和目标物体的反射率而有所不同,但使该传感器特别之处在于其尺寸。TFmini S LiDAR传感器不使用激光进行测距。相反,它包含集成的LED和光学元件,因此被标记为“LiDAR”。然而,将此设备视为“飞行时间红外测距仪”(使用ToF而非三角测量来确定范围)可能更为合适。该传感器可以通过1x4 1.25mm间距连接器连接到现有的TFmini Click board™。

使用的MCU引脚
mikroBUS™映射器
“仔细看看!”
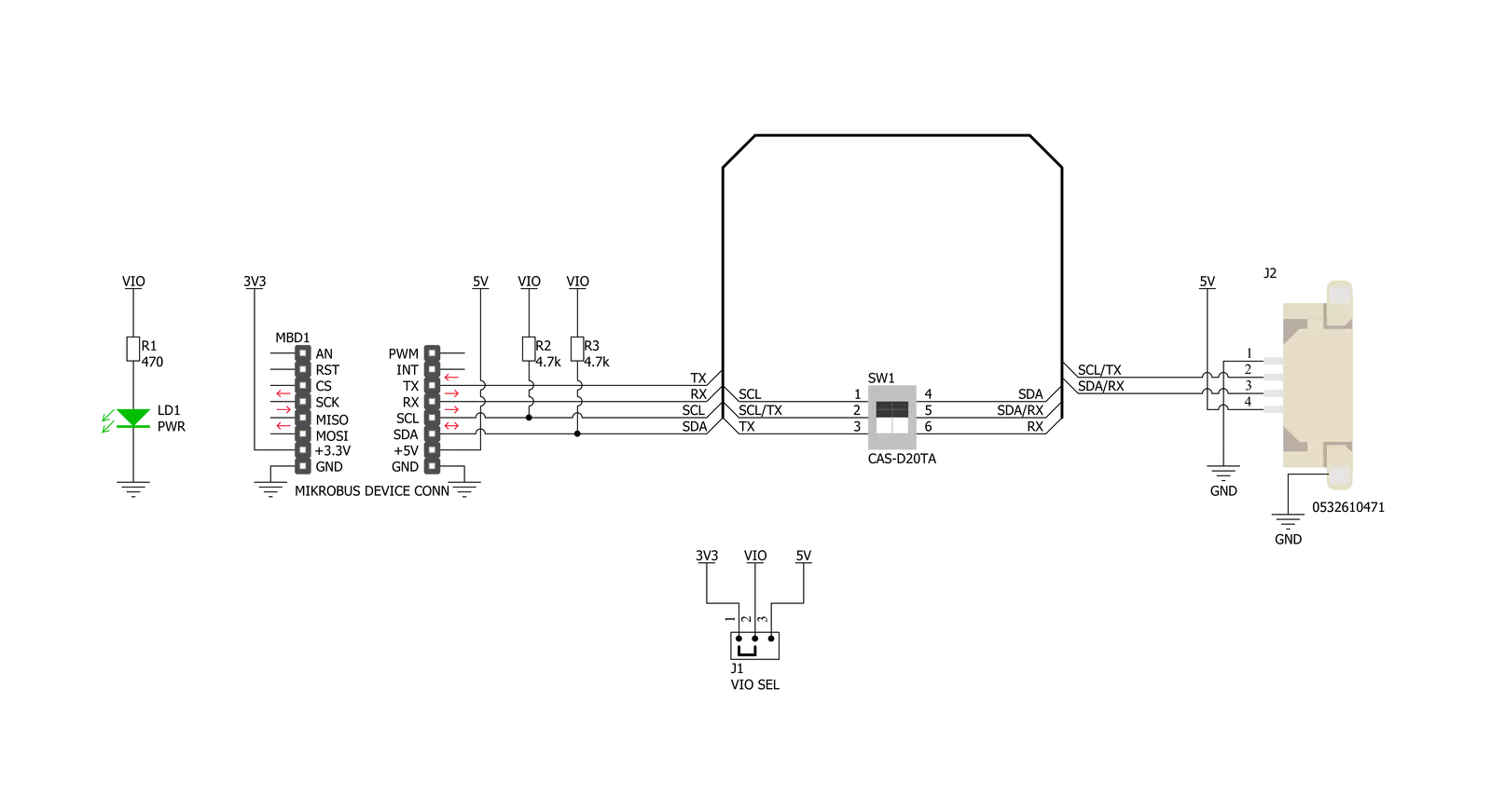
Click board™ 原理图
一步一步来
项目组装

从选择您的开发板和Click板™开始。以Curiosity PIC32 MZ EF作为您的开发板开始。














实时跟踪您的结果
应用程序输出
1. 应用程序输出 - 在调试模式下,“应用程序输出”窗口支持实时数据监控,直接提供执行结果的可视化。请按照提供的教程正确配置环境,以确保数据正确显示。

2. UART 终端 - 使用UART Terminal通过USB to UART converter监视数据传输,实现Click board™与开发系统之间的直接通信。请根据项目需求配置波特率和其他串行设置,以确保正常运行。有关分步设置说明,请参考提供的教程。

3. Plot 输出 - Plot功能提供了一种强大的方式来可视化实时传感器数据,使趋势分析、调试和多个数据点的对比变得更加直观。要正确设置,请按照提供的教程,其中包含使用Plot功能显示Click board™读数的分步示例。在代码中使用Plot功能时,请使用以下函数:plot(insert_graph_name, variable_name);。这是一个通用格式,用户需要将“insert_graph_name”替换为实际图表名称,并将“variable_name”替换为要显示的参数。

软件支持
库描述
该库包含 TFmini Click 驱动程序的 API。
关键功能:
tfmini_get_firmware_version- 此功能读取传感器固件版本tfmini_get_measurement- 此功能读取输出数据帧,并从中获取距离、强度和温度值tfmini_send_frame- 此功能向传感器发送命令帧
开源
代码示例
完整的应用程序代码和一个现成的项目可以通过NECTO Studio包管理器直接安装到NECTO Studio。 应用程序代码也可以在MIKROE的GitHub账户中找到。
/*!
* @file main.c
* @brief TFmini Click Example.
*
* # Description
* This example demonstrates the use of TFmini Click board by reading the measurements
* from the attached TFmini-S or TFmini Plus sensors.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and the Click board, and reads the firmware version of the attached sensor.
*
* ## Application Task
* Reads the target distance, signal strength and the internal sensor temperature every 100ms approximately,
* and displays the results on the USB UART.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "tfmini.h"
static tfmini_t tfmini;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
tfmini_cfg_t tfmini_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
tfmini_cfg_setup( &tfmini_cfg );
TFMINI_MAP_MIKROBUS( tfmini_cfg, MIKROBUS_1 );
tfmini_drv_interface_selection ( &tfmini_cfg, TFMINI_DRV_SEL_UART );
if ( TFMINI_OK != tfmini_init( &tfmini, &tfmini_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( TFMINI_OK != tfmini_default_cfg ( &tfmini ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
uint32_t fw_version = 0;
if ( TFMINI_OK == tfmini_get_firmware_version ( &tfmini, &fw_version ) )
{
log_printf( &logger, " FW Version: 0x%.6LX\r\n", fw_version );
}
Delay_ms ( 1000 );
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
int16_t distance = 0, strength = 0;
float temperature = 0;
if ( TFMINI_OK == tfmini_get_measurement ( &tfmini, &distance, &strength, &temperature ) )
{
log_printf( &logger, " Target distance: %d cm\r\n", distance );
log_printf( &logger, " Signal strength: %d\r\n", strength );
log_printf( &logger, " Sensor temperature: %.2f C\r\n\n", temperature );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END