Provide real-time insights into your cardiovascular health using MAXM8616 and PIC18F87J50
Unlock your heart's secrets

Published Jun 01, 2023
Click board™
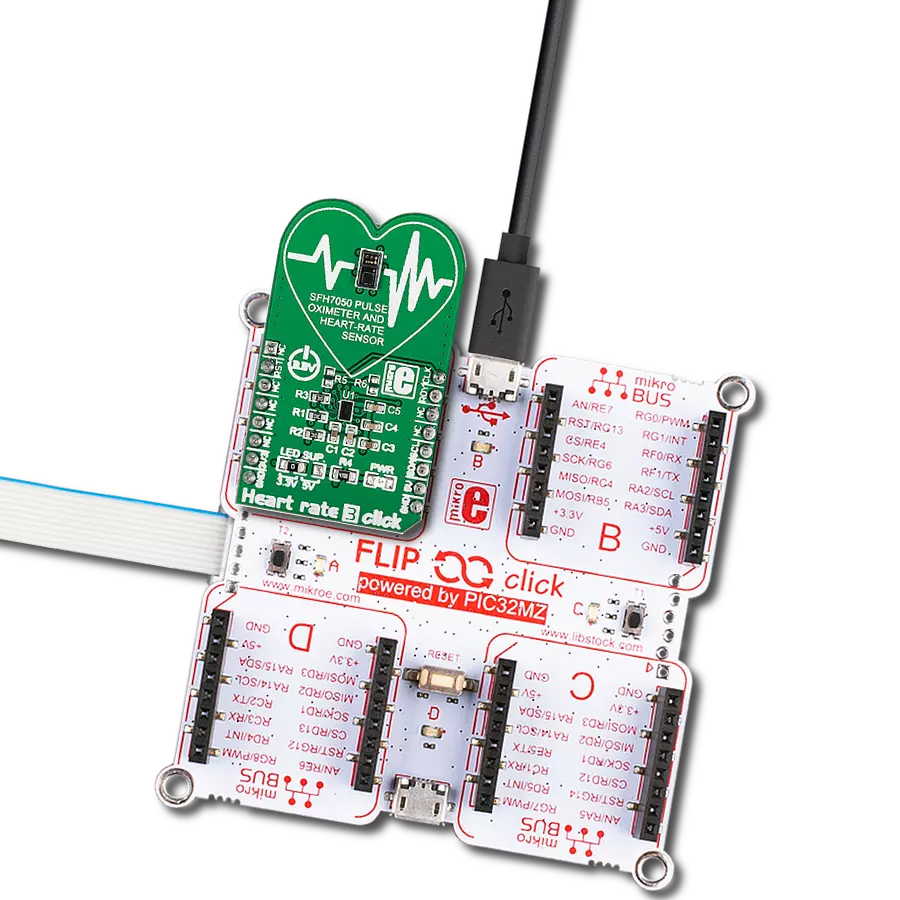
Heart Rate 2 Click
Dev. board
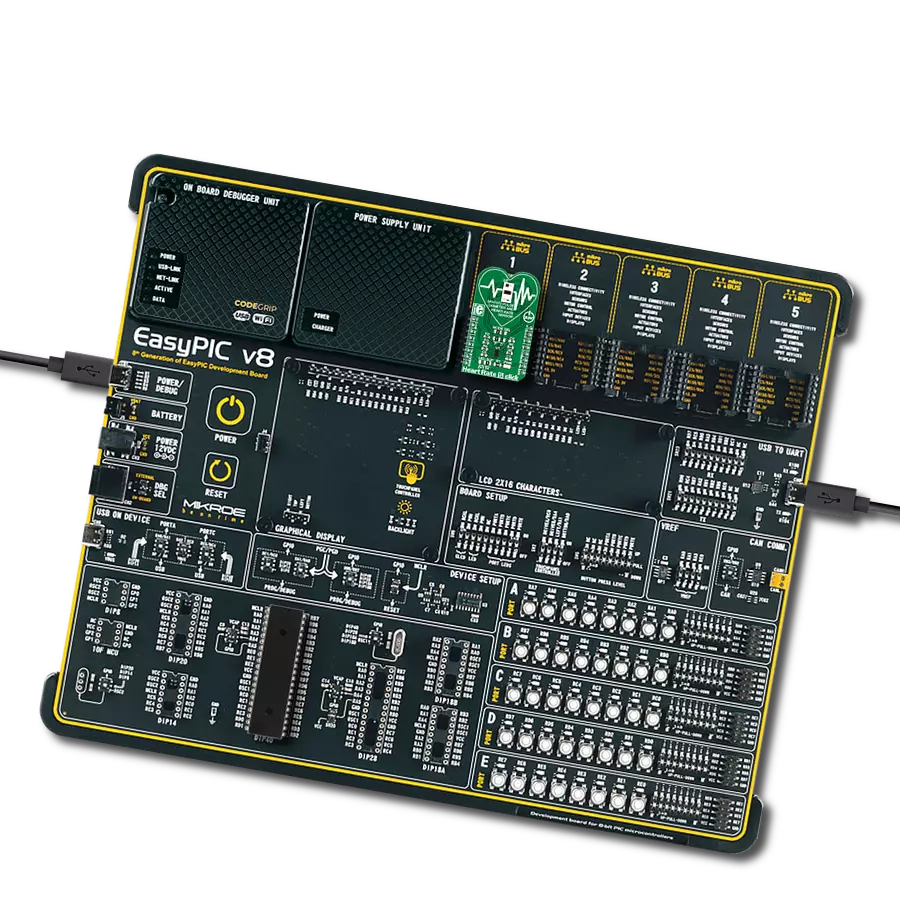
Fusion for PIC v8
Compiler
NECTO Studio
MCU
PIC18F87J50
Take control of your heart health with our intuitive heart rate monitoring solution
A
A
Hardware Overview
How does it work?
Heart Rate 2 Click is based on MAXM86161, a complete, integrated optical data acquisition system from Analog Devices ideal for optical pulse oximetry and heart-rate detection applications. It comprises a single optical readout channel and current LED driver DACs that modulate LED pulses for various optical measurements. The LED current DACs have 8 bits of dynamic range with four programmable full-scale ranges of 31mA, 62mA, 94mA, and 124mA. The LED drivers are low dropout current sources allowing for low-noise, power-supply independent LED currents to be sourced at the lowest supply voltage possible, minimizing LED power consumption. The LED pulse width can be programmed from 14.8μs to 117.3μs to allow the algorithms to optimize SpO2 and HR accuracy at the lowest dynamic power consumption dictated by the application. The optical subsystem Heart Rate 2 Click based on MAXM86161 comprises ambient light cancellation (ALC), a continuous-time
sigma-delta ADC, and a proprietary discrete time filter. ALC incorporates a proprietary scheme to cancel ambient-light-generated photodiode currents, allowing the sensor to work in high ambient light conditions. The optical ADC has programmable full-scale ranges of 4μA to 32μA. The internal ADC is a continuous time, oversampling sigma-delta converter with 19-bit resolution. The ADC output data rate can be programmed from 8sps (samples per second) to 4096sps. The MAXM86161 includes a proprietary discrete time filter to reject 50Hz/60Hz interference and change residual ambient light from the sensor measurements. The sensor also includes an optical proximity function which could significantly reduce energy consumption and extend battery life when the sensor is not in contact with the skin. MAXM86161 power to a minimum during situations with no reflective returned signal. It is also intended to reduce the emitted light to a minimum or even below
what the human eye perceives. The native delta-sigma ADC linearity is exceptional. However, the sub-ranging DAC uses a unary architecture with some mismatch between the DAC's unit current sources and the ADC reference current. This mismatch results in some transfer function nonlinearity (XNL) errors when the sub-DAC code transitions. For this reason, the sub-ranging DAC algorithm is designed to minimize DAC transitions by introducing large hysteresis through the overlapping sub-DAC ranges. Consequently, under normal PPG operation, the sub-DAC does not transition, and the linearity of the converter signal is driven entirely by the linear native delta-sigma ADC. In addition to algorithmically reducing the sub-DAC transitions, the MAXM86161 incorporates a self-calibration scheme that can be used to reduce the sub-DAC XNL errors further.



Features overview
Development board
Fusion for PIC v8 is a development board specially designed for the needs of rapid development of embedded applications. It supports a wide range of microcontrollers, such as different PIC, dsPIC, PIC24, and PIC32 MCUs regardless of their number of pins, and a broad set of unique functions, such as the first-ever embedded debugger/programmer over WiFi. The development board is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, connectors, and others, in one place. Thanks to innovative manufacturing technology, Fusion for PIC v8 provides a fluid and immersive working experience, allowing access anywhere and under any
circumstances at any time. Each part of the Fusion for PIC v8 development board contains the components necessary for the most efficient operation of the same board. In addition to the advanced integrated CODEGRIP programmer/debugger module, which offers many valuable programming/debugging options and seamless integration with the Mikroe software environment, the board also includes a clean and regulated power supply module for the development board. It can use a wide range of external power sources, including a battery, an external 12V power supply, and a power source via the USB Type-C (USB-C) connector. Communication options such as USB-UART, USB
HOST/DEVICE, CAN (on the MCU card, if supported), and Ethernet are also included, including the well-established mikroBUS™ standard, a standardized socket for the MCU card (SiBRAIN standard), and two display options (graphical and character-based LCD). Fusion for PIC v8 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
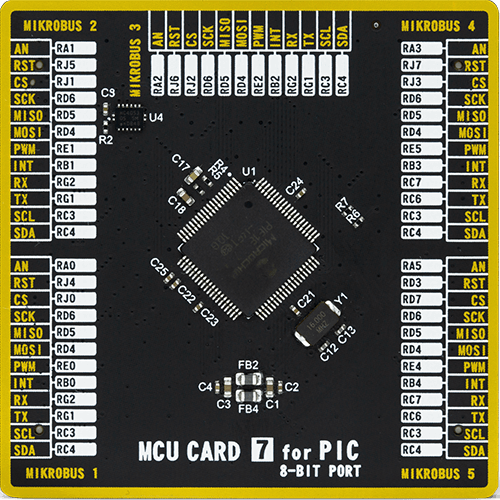
MCU Card / MCU
Type
8th Generation
Architecture
PIC
MCU Memory (KB)
128
Silicon Vendor
Microchip
Pin count
80
RAM (Bytes)
3904
Used MCU Pins
mikroBUS™ mapper
Take a closer look
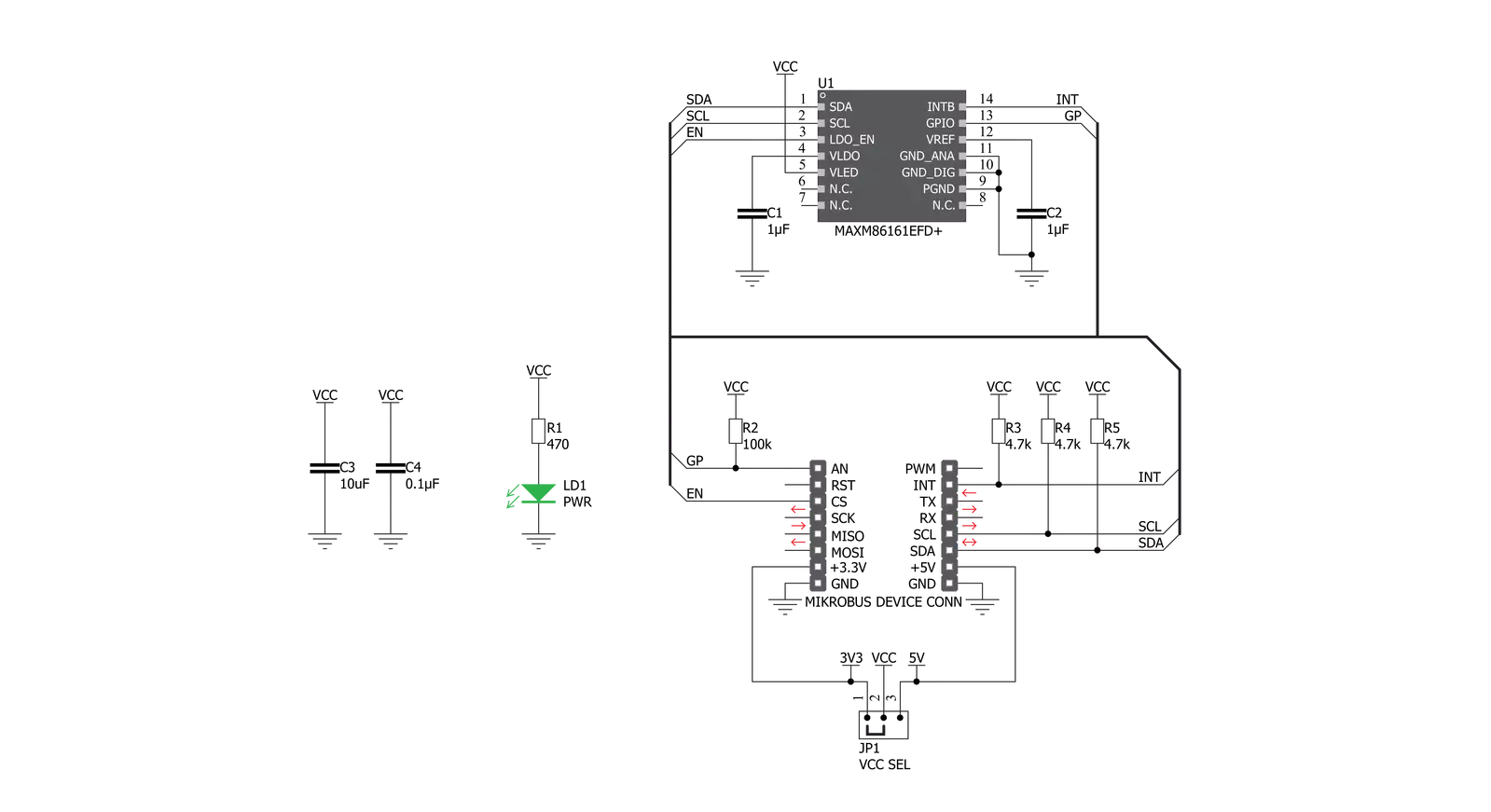
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Fusion for PIC v8 as your development board.













Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for Heart Rate 2 Click driver.
Key functions:
uint8_t heartrate2_generic_read ( uint8_t reg_adr )- Generic function for reading data.void heartrate2_generic_write ( uint8_t reg_adr, uint8_t write_data )- Generic function for writing data.void heartrate2_default_configuration ( uint8_t cfg_led )- Function for setting default config and turning on one led with cfg_led parameter.void heartrate2_read_fifo ( heartrate2_fifo_data_t *fifo )- Function for reading fifo data and tag values from device.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief HeartRate2 Click example
*
* # Description
* This example demonstrates the use of Heart rate 2 Click board.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initilizes the driver, resets the device, checks the device ID and applies default settings.
*
* ## Application Task
* Reads the data from Green diode and displays the results on USB UART if the measured data
* is above defined threshold, otherwise, it displays a desired message on the terminal.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "heartrate2.h"
// ------------------------------------------------------------------ VARIABLES
static heartrate2_t heartrate2;
static log_t logger;
static uint16_t counter = 1000;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
heartrate2_cfg_t cfg;
uint8_t rd_stat;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
heartrate2_cfg_setup( &cfg );
HEARTRATE2_MAP_MIKROBUS( cfg, MIKROBUS_1 );
heartrate2_init( &heartrate2, &cfg );
log_printf( &logger, "Configuring the module...\r\n" );
Delay_ms ( 1000 );
heartrate2_set_en( &heartrate2, HEARTRATE2_PIN_HIGH );
Delay_ms ( 100 );
heartrate2_soft_reset ( &heartrate2 );
rd_stat = heartrate2_generic_read( &heartrate2, HEARTRATE2_REG_PART_ID );
if ( rd_stat != HEARTRATE2_DEV_ID )
{
log_error( &logger, "---- WRONG ID ----" );
log_printf( &logger, "Please restart your system.\r\n" );
for ( ; ; );
}
heartrate2_default_cfg( &heartrate2, HEARTRATE2_CONFIG_GREEN );
log_printf( &logger, "The module has been configured!\r\n" );
Delay_ms ( 1000 );
}
void application_task ( void )
{
heartrate2_fifo_data_t fifo_object;
heartrate2_read_fifo( &heartrate2, &fifo_object );
if ( fifo_object.tag == HEARTRATE2_FIFO_TAG_PPG1_LEDC1 )
{
counter++;
if ( fifo_object.data_val > 1000 )
{
log_printf( &logger, "%lu;\r\n", fifo_object.data_val );
counter = 1000;
}
else if ( counter > 1000 )
{
log_printf( &logger, "Please place your index finger on the sensor.\r\n" );
counter = 0;
}
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Biometrics