Enhance your thermal awareness with advanced thermal imaging solution based on the MLX90640-BAA and PIC18F86J15
Count on clarity: The thermal imaging solution you need!

Published Sep 22, 2023
Click board™
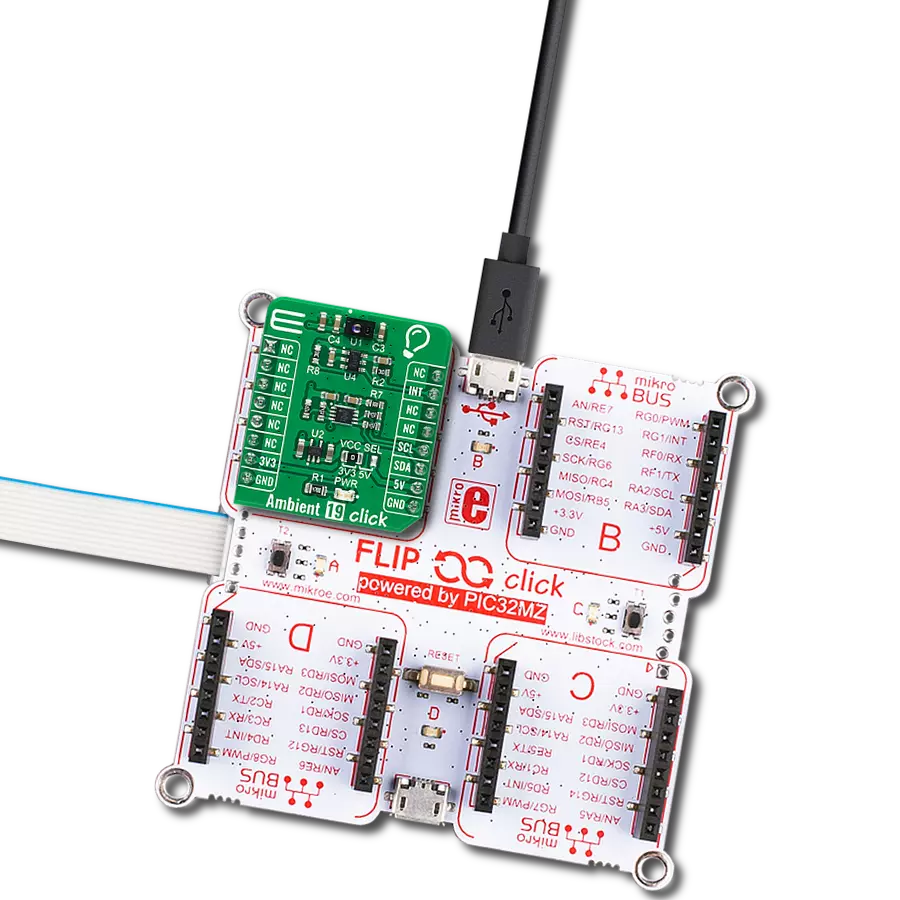
IR Grid 3 click
Dev. board
Fusion for PIC v8
Compiler
NECTO Studio
MCU
PIC18F86J15
Elevate your thermal perception with our advanced thermal imaging solution, designed to enhance your ability to monitor, analyze, and optimize temperature-related aspects in your projects and processes
A
A
Hardware Overview
How does it work?
IR Grid 3 Click is based on the MLX90640ESF-BAA, a 32x24 IR array sensor, from Melexis. This sensor contains 8 Kbit EEPROM, used to store all the compensation and calibration parameters, along with some editable user parameters, such as the config registers, I2C address and similar. These sensors can measure temperature relative to the cold junction temperature, and for this reason, the MLX90640ESF-BAA IR sensor incorporates a PTAT (Proportional to Absolute Temperature) compensation sensor. The device also contains the power supply voltage measurement unit, allow power supply monitoring. It is recommended that the supply voltage stay as accurate as possible, which is taken care of if used with the MikroElektronika development systems. The IR sensor array, as well as the PTAT sensor readings, are sampled by fast internal ADC and stored on the RAM, which can be accessed via the I2C. The resolution of the ADC can be programmed between 16bit and 19bit. The MLX90640ESF-BAA IR sensor used on this Click board™ has a Field of View (FOV) of 110°x75°, with the IR sensing elements arranged in a 32x28 grid. Each sensor measures the temperature in its individual FOV, allowing the host MCU to build a thermal image or calculate the temperature at each spot of the viewed scene. The measurement results are stored in the onboard RAM. The entire RAM area is divided into two pages, with access patterns controlled by the configuration registers (chess
pattern, or interleaved pattern). The configuration parameters are factory calibrated for chess pattern access, yielding the most accurate results when using this mode. The chess pattern mode is selected by default. Two modes of operation are available: the device can continuously sample data from the IR elements, with the programmed refresh rate (up to 64 frames per second), or it can take one frame, by sampling the selected page. The status byte contains flags that indicate that the reading of a specific page is done. The configuration and control registers allow configuring of the working parameters. These registers contain bits that control the behavior of the sensor IC: the refresh rate, ADC resolution, measurement mode (continuous or step mode), sleep mode, I2C mode (FM or FM+), etc. The data from the EEPROM registers is copied after the POR cycle to the working RAM registers, preparing the device to be instantly operated. Besides the default working parameters, the EEPROM IC contains all the compensating parameters, necessary for completing the accurate thermal computations. A certain workflow has to be followed when operating this sensor. The workflow includes calculation of the compensation parameters that are stored in the EEPROM for each element. Those calculations include ambient temperature calculation, pixel offset calculation, pixel to pixel sensitivity difference compensation, object emissivity compensation, and object
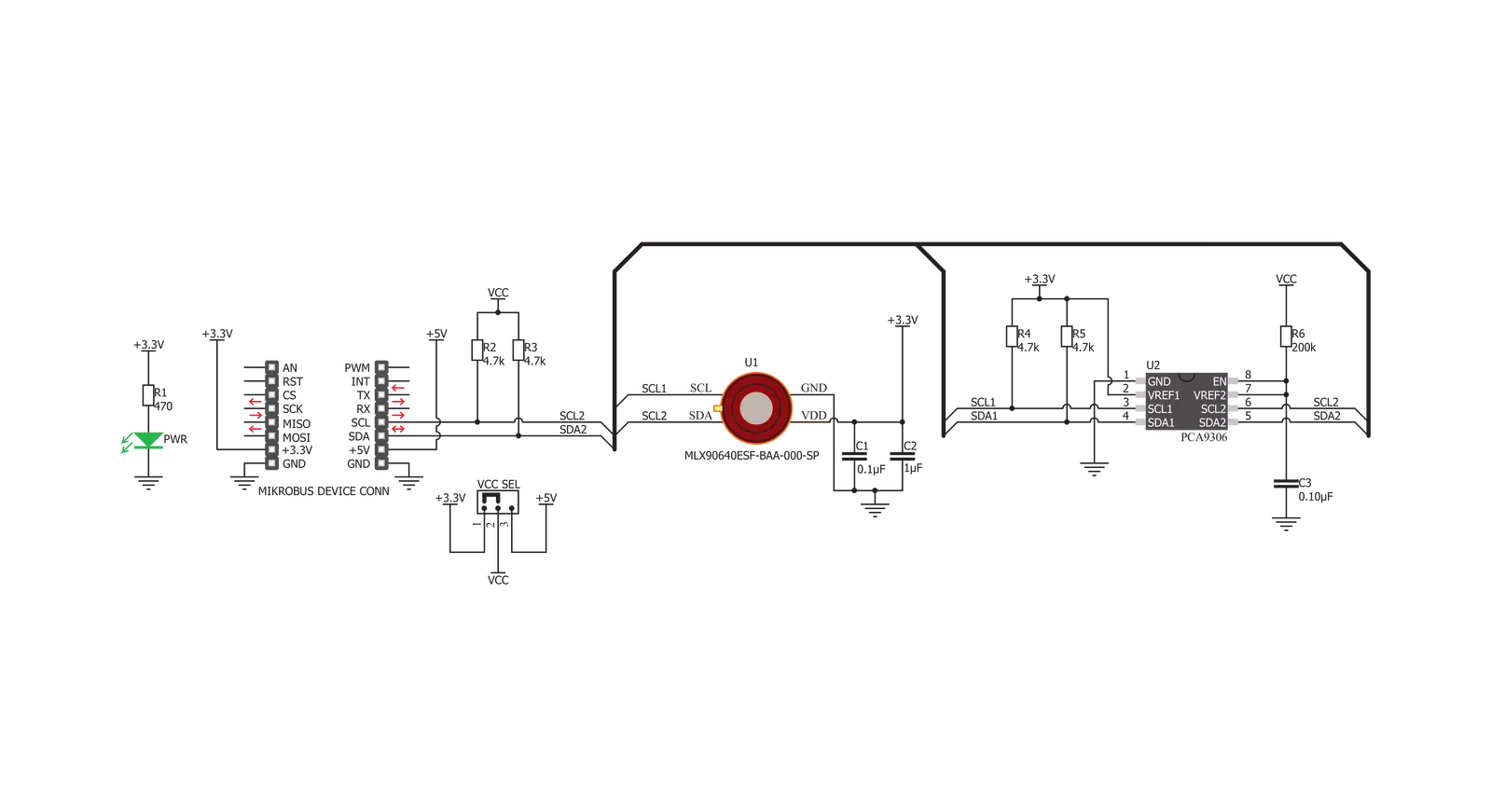
temperature calculation. The datasheet of the MLX90640ESF-BAA IR sensor contains these equations, which use the parameters stored in EEPROM. However, this Click board™ is supported by the library, which contains functions that simplify working with this sensor. It should be noted that the sensor measures the IR emissivity of an object, so it is to expect that some materials cannot be accurately measured by this sensor due to their low emissivity, such as the aluminum. To better understand the emissivity property of the materials, a person wearing clothes, can be taken as an example: the measured temperature will reflect the clothes temperature, rather than the body temperature itself, which is known to be about 37 ˚C Care should be taken not to expose the Click board™ to a cold or hot air flow, as it will cause false readings of the real temperature. This sensor requires the temperature across the sensor package to be constant. The MLX90640ESF-BAA IR sensor uses 3.3V for optimal results. While the power for the IR sensor itself is taken from the 3.3V mikroBUS™ rail, in order to support MCUs which use 5V compatible logic levels, the Click board™ comes equipped with PCA9306, a bi-directional I2C level translator IC, produced by Texas Instruments. This allows the logic voltage level to be selected by the SMD jumper labeled as VCC SEL. Besides I2C bus lines, no additional lines of the mikroBUS™ are used. I2C bus lines are routed to the respective pins of the mikroBUS™.


Features overview
Development board
Fusion for PIC v8 is a development board specially designed for the needs of rapid development of embedded applications. It supports a wide range of microcontrollers, such as different PIC, dsPIC, PIC24, and PIC32 MCUs regardless of their number of pins, and a broad set of unique functions, such as the first-ever embedded debugger/programmer over WiFi. The development board is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, connectors, and others, in one place. Thanks to innovative manufacturing technology, Fusion for PIC v8 provides a fluid and immersive working experience, allowing access anywhere and under any
circumstances at any time. Each part of the Fusion for PIC v8 development board contains the components necessary for the most efficient operation of the same board. In addition to the advanced integrated CODEGRIP programmer/debugger module, which offers many valuable programming/debugging options and seamless integration with the Mikroe software environment, the board also includes a clean and regulated power supply module for the development board. It can use a wide range of external power sources, including a battery, an external 12V power supply, and a power source via the USB Type-C (USB-C) connector. Communication options such as USB-UART, USB
HOST/DEVICE, CAN (on the MCU card, if supported), and Ethernet are also included, including the well-established mikroBUS™ standard, a standardized socket for the MCU card (SiBRAIN standard), and two display options (graphical and character-based LCD). Fusion for PIC v8 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
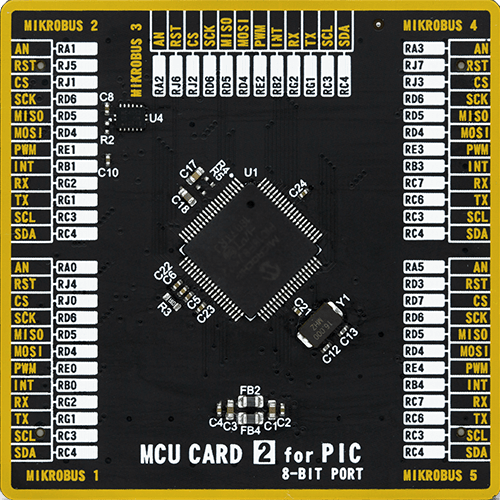
MCU Card / MCU
Type
8th Generation
Architecture
PIC
MCU Memory (KB)
96
Silicon Vendor
Microchip
Pin count
80
RAM (Bytes)
3936
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Fusion for PIC v8 as your development board.













Software Support
Library Description
This library contains API for IR Grid 3 Click driver.
Key functions:
irgrid3_generic_write- This function reads a desired number of data bytes starting from the selected register by using I2C serial interfaceirgrid3_get_frame_data- This function is used for getting frame datairgrid3_get_pixel_temperature- This function is used for getting pixels temperature.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief IRGrid3 Click example
*
* # Description
* The demo application displays a reading of ambient temperature and
* a 32x24 pixel object temperature matrix.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Configures the Click and log objects and sets the Click default configuration.
*
* ## Application Task
* Reads the temperature of all pixels every 500ms
* and displays it on USB UART in a form of a 32x24 matrix.
*
* @author Stefan Ilic
*
*/
#include "board.h"
#include "log.h"
#include "irgrid3.h"
static irgrid3_t irgrid3;
static log_t logger;
void application_init ( void ) {
log_cfg_t log_cfg; /**< Logger config object. */
irgrid3_cfg_t irgrid3_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
irgrid3_cfg_setup( &irgrid3_cfg );
IRGRID3_MAP_MIKROBUS( irgrid3_cfg, MIKROBUS_1 );
err_t init_flag = irgrid3_init( &irgrid3, &irgrid3_cfg );
if ( I2C_MASTER_ERROR == init_flag ) {
log_error( &logger, " Application Init Error. " );
log_info( &logger, " Please, run program again... " );
for ( ; ; );
}
irgrid3_default_cfg ( &irgrid3 );
Delay_ms ( 1000 );
log_info( &logger, "---- Start measurement ----" );
}
void application_task ( void ) {
float px_matrix[ 768 ];
float temp_ambient;
irgrid3_get_pixel_temperature( &irgrid3, &temp_ambient, px_matrix );
log_printf( &logger, "\r\n>> Pixel temperature matrix 32x24 <<\r\n" );
for ( uint16_t cnt = 1 ; cnt < 769 ; cnt++) {
log_printf( &logger, "%.2f", px_matrix[ cnt - 1 ] );
if ( ( ( cnt % 32 ) == 0 ) ) {
log_printf( &logger, "\r\n" );
} else {
log_printf( &logger, " | " );
}
}
log_printf( &logger, "\r\n** Ambient (sensor) temperature is %.2f Celsius\r\n", temp_ambient );
Delay_ms ( 500 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END