Achieve best-in-class non-volatile memory with long data retention using MR25H256 and STM32F302VC
Dive into the world of MRAM
Published Jul 22, 2025
Click board™
MRAM Click
Dev. board
CLICKER 4 for STM32F302VCT6
Compiler
NECTO Studio
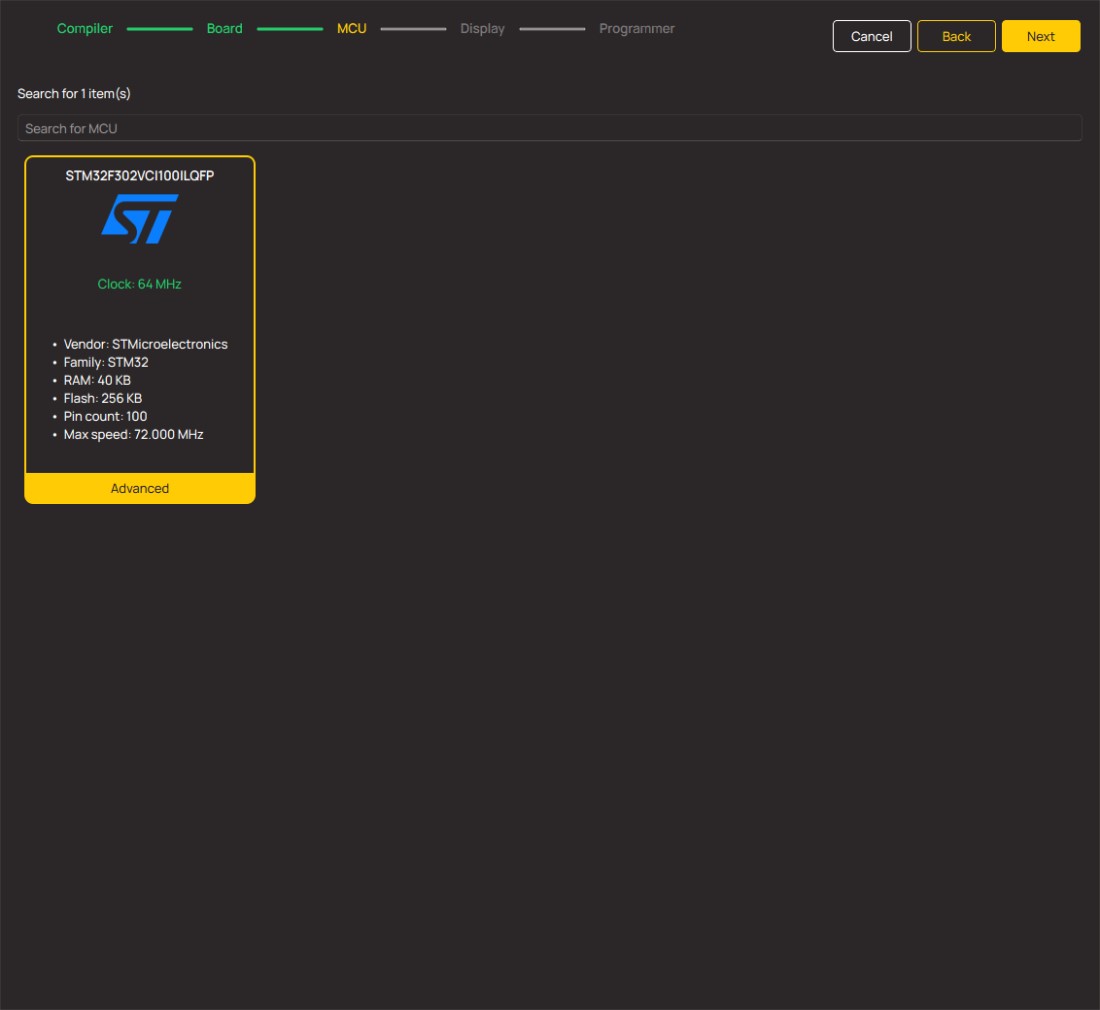
MCU
STM32F302VC
Trust MRAM as your data's guardian. Our solution offers persistent memory with rapid read and write capabilities, ensuring data integrity and fast access for applications where reliability is paramount.
A
A
Hardware Overview
How does it work?
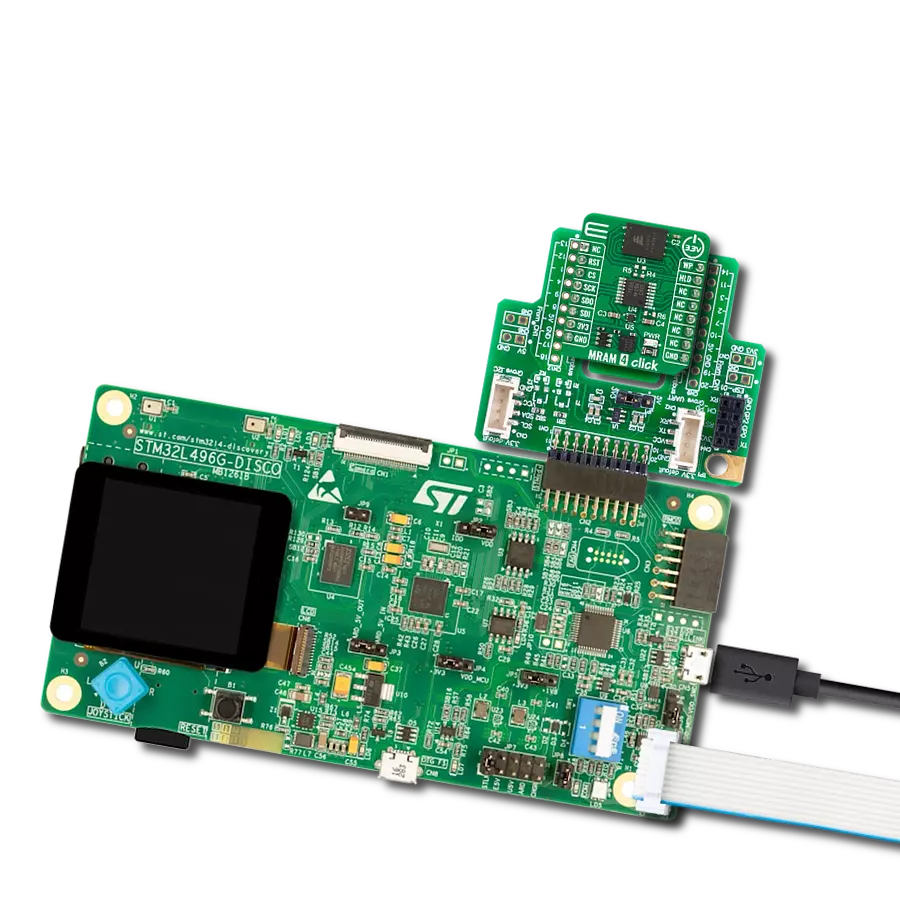
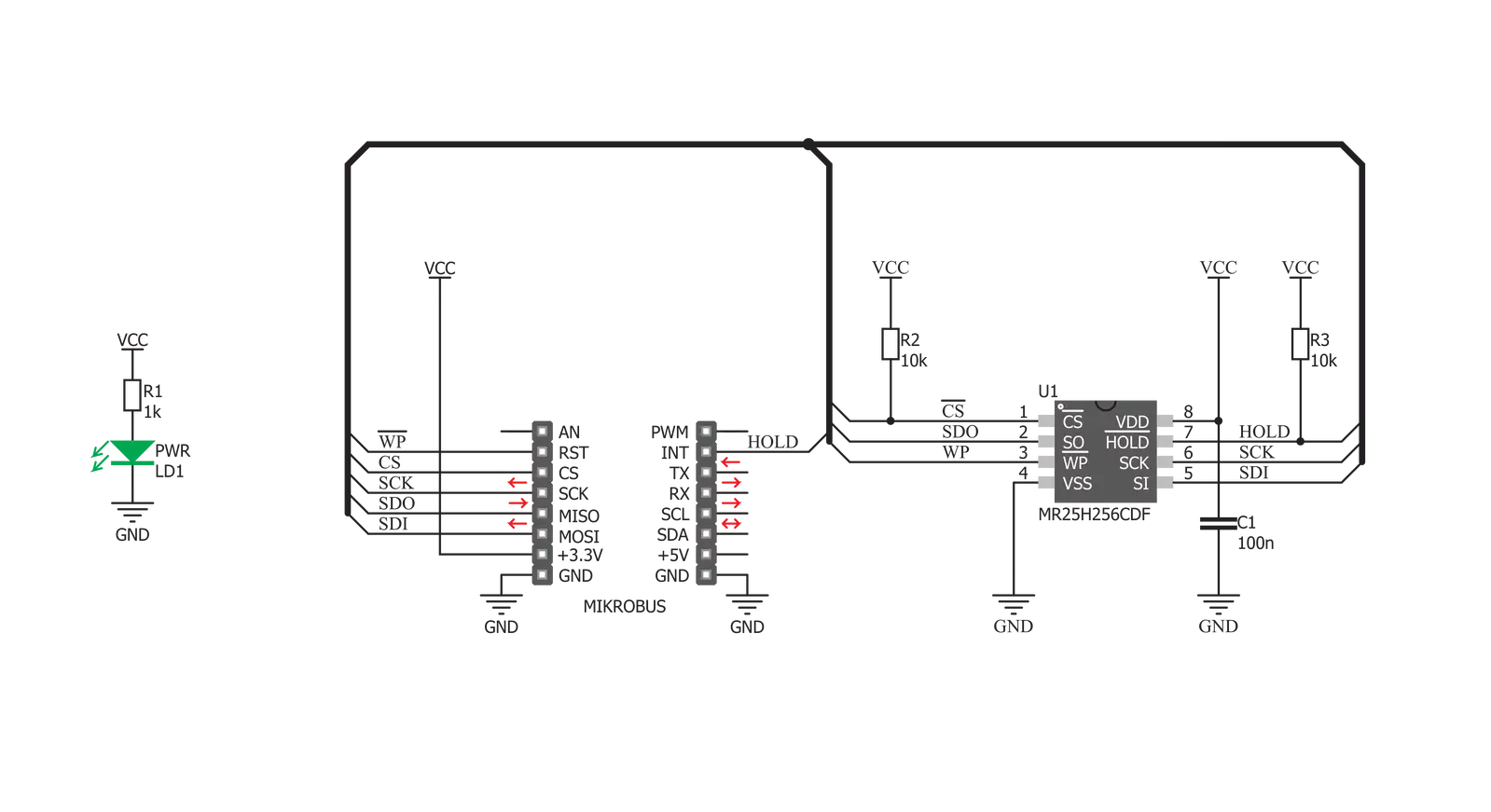
MRAM Click is based on the MR25H256, a 256 kilobits serial SPI MRAM memory module from Everspin company. This module contains 262,144 bits of memory that can be randomly accessed. The pinout of the used memory module is the same as most commonly used EEPROM modules so that it can directly replace it. The usual SPI lines - SO, SI, SCK and #CS pins from the MR25H256 IC are routed to the mikroBUS™ SPI port (MISO, MOSI, SCK and CS pins). Besides the SPI serial bus, there are two more pins routed to the mikroBUS™. The #HOLD pin of the MR25H256 IC is routed to the INT pin of the mikroBUS™ and it is used to hold the data transfer. When this pin is pulled to a LOW logic level, all data transfer operations are suspended. However, this function is enabled only when the device is already addressed with the CS pin pulled to a LOW level.
This allows to pause the data transfer and resume it later without the need to first address it via the CS pin, reducing the output latency that way. While the data transfer is paused, the SO pin will switch to a high impedance mode (HIGH Z) and will remain inactive. The SCK pulses are completely ignored. The #HOLD pin of the MR25H256 IC is pulled to a HIGH logic level by an onboard pull-up resistor. The #WP pin of the MR25H256 IC is routed to the INT pin of the mikroBUS™ and it is used to prevent writes to the status register, acting as a hardware write protect pin. It is routed to the RST pin of the mikroBUS™. The logical organization of the moduke, such as read and write commands and the status register of the MR25H256 IC are the same as with most commonly used EEPROM modules, such as the one used in EEPROM 4 Click. That allows this
memory module, as well as MRAM click to replace the existing EEPROM module with not too much additional work. The provided libraries offer all the functions needed to work with the MRAM click. Their usage is demonstrated in the included example application which can be used as a reference for further development. The device should wait for the system voltage to become stable before the writing is attempted. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. Also, it comes equipped with a library containing functions and an example code that can be used as a reference for further development.


Features overview
Development board
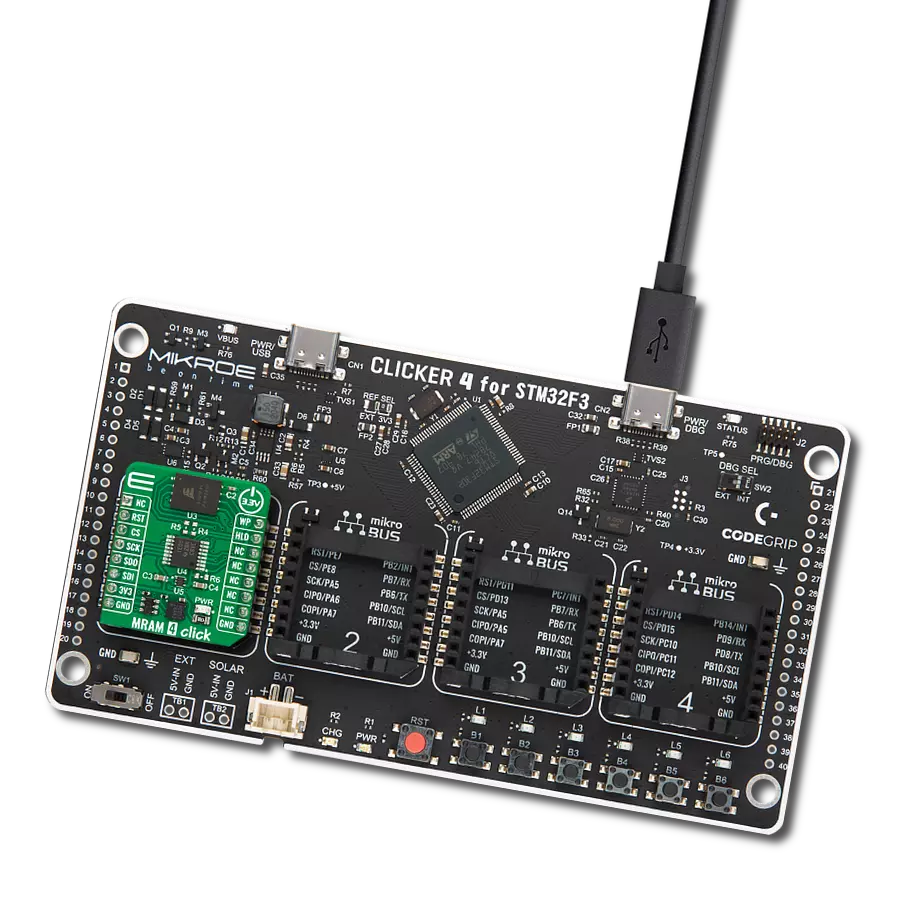
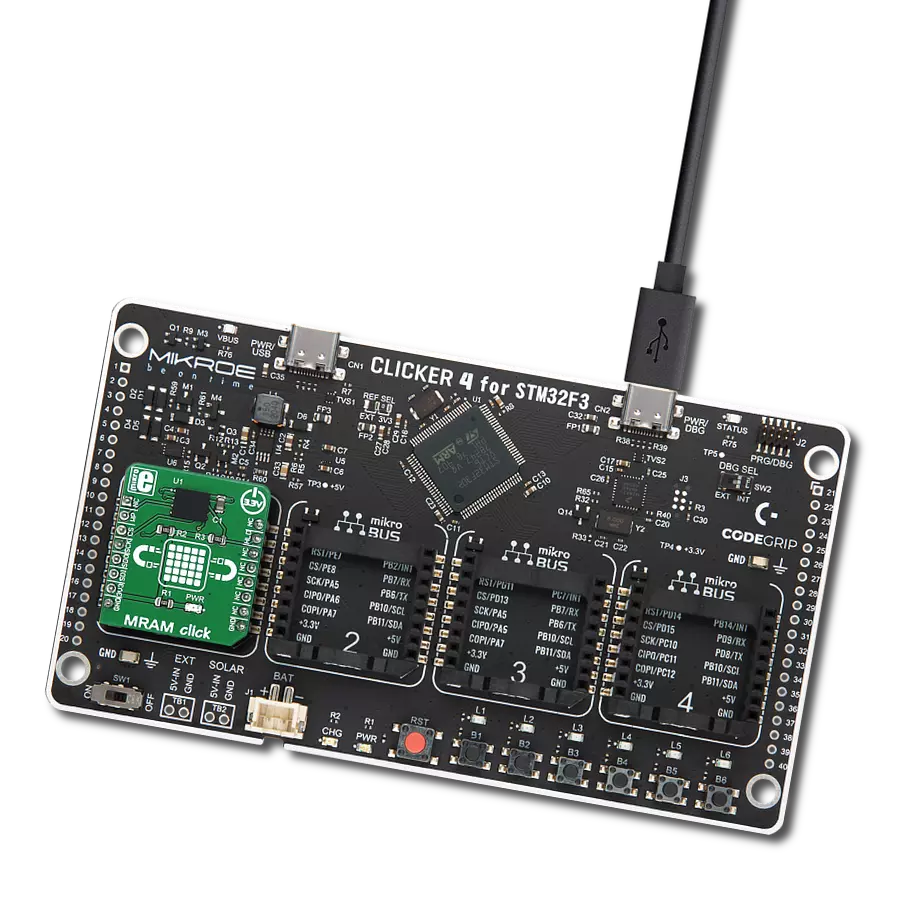
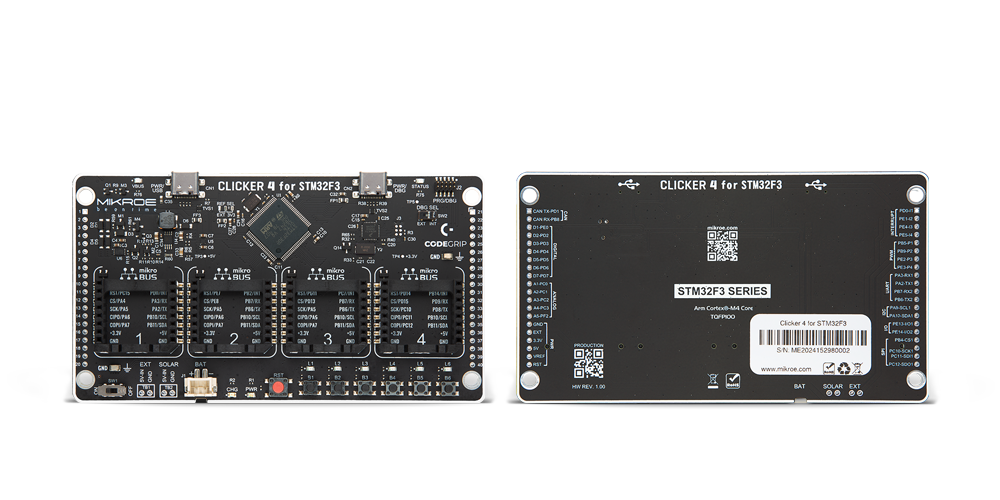
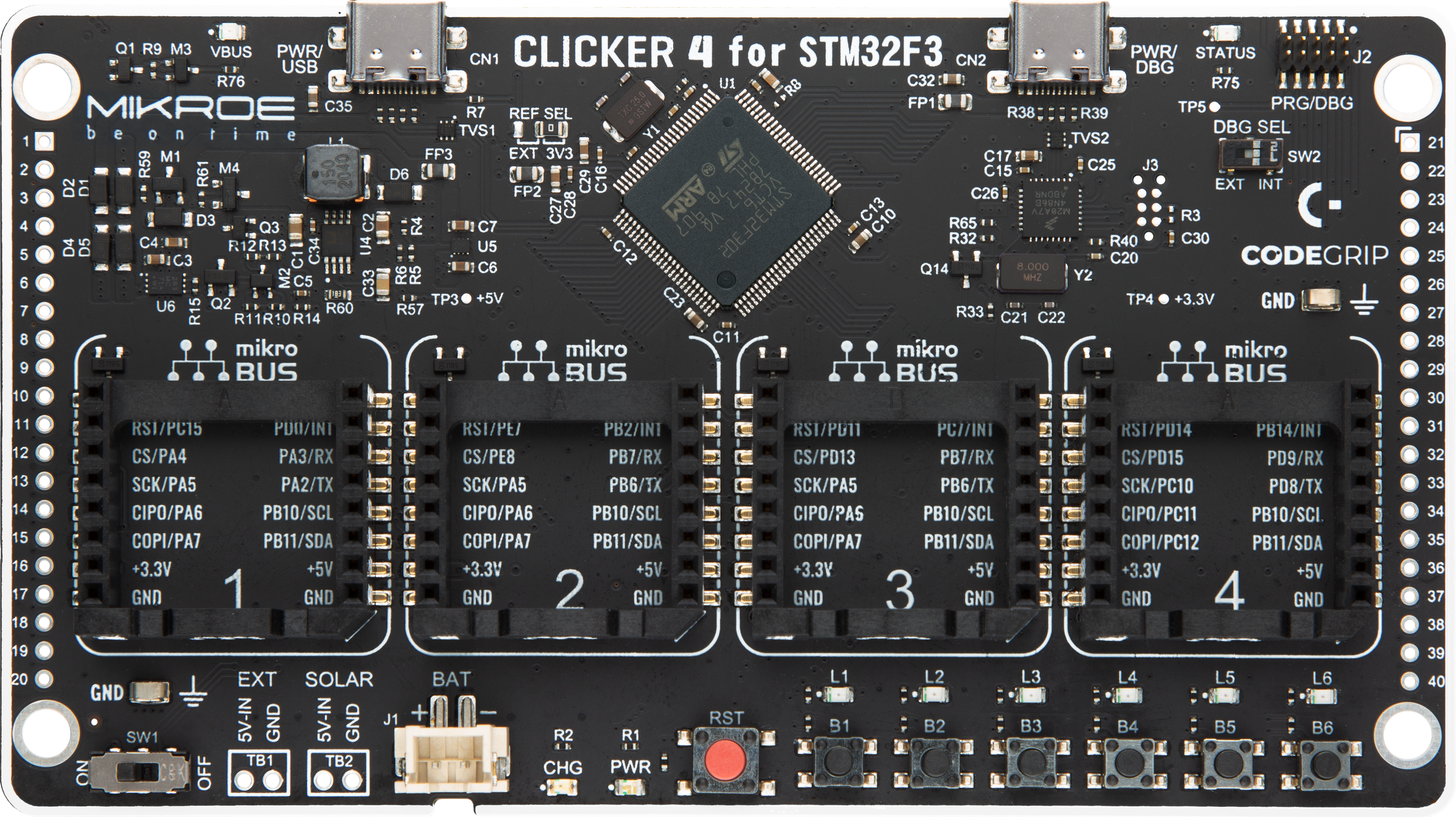
Clicker 4 for STM32F3 is a compact development board designed as a complete solution, you can use it to quickly build your own gadgets with unique functionalities. Featuring a STM32F302VCT6, four mikroBUS™ sockets for Click boards™ connectivity, power managment, and more, it represents a perfect solution for the rapid development of many different types of applications. At its core, there is a STM32F302VCT6 MCU, a powerful microcontroller by STMicroelectronics, based on the high-
performance Arm® Cortex®-M4 32-bit processor core operating at up to 168 MHz frequency. It provides sufficient processing power for the most demanding tasks, allowing Clicker 4 to adapt to any specific application requirements. Besides two 1x20 pin headers, four improved mikroBUS™ sockets represent the most distinctive connectivity feature, allowing access to a huge base of Click boards™, growing on a daily basis. Each section of Clicker 4 is clearly marked, offering an intuitive and clean interface. This makes working with the development
board much simpler and thus, faster. The usability of Clicker 4 doesn’t end with its ability to accelerate the prototyping and application development stages: it is designed as a complete solution which can be implemented directly into any project, with no additional hardware modifications required. Four mounting holes [4.2mm/0.165”] at all four corners allow simple installation by using mounting screws. For most applications, a nice stylish casing is all that is needed to turn the Clicker 4 development board into a fully functional, custom design.
Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M4
MCU Memory (KB)
256
Silicon Vendor
STMicroelectronics
Pin count
100
RAM (Bytes)
40960
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
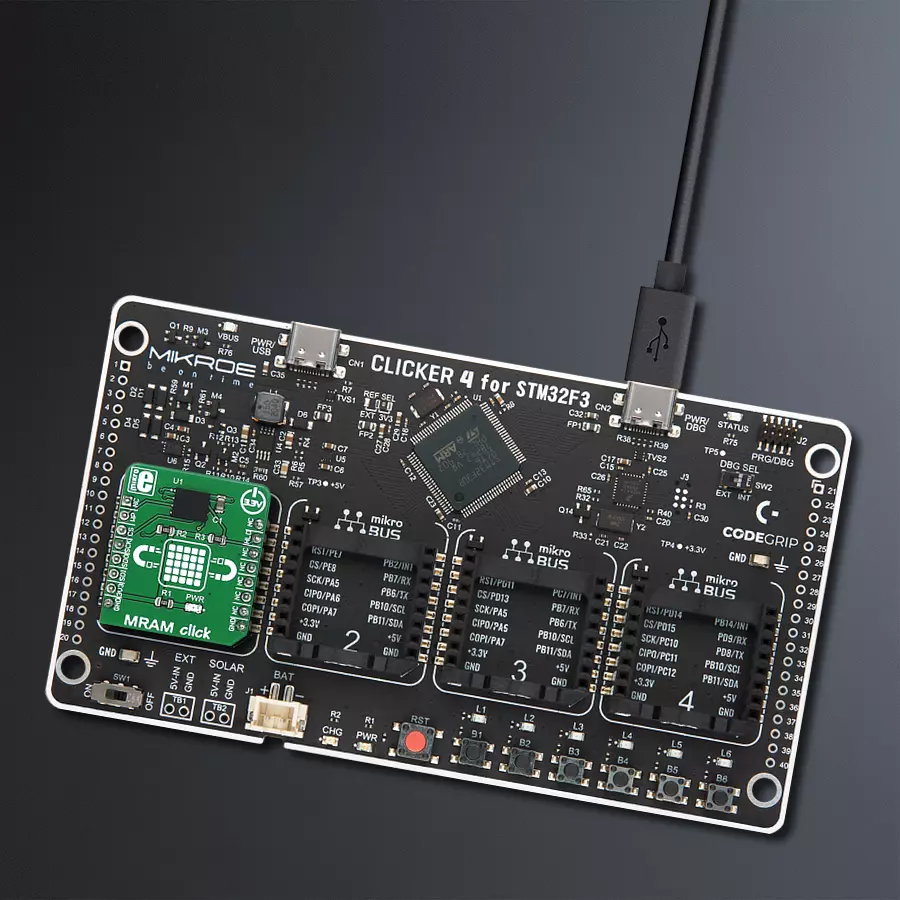
Step by step
Project assembly
Start by selecting your development board and Click board™. Begin with the CLICKER 4 for STM32F302VCT6 as your development board.









Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for MRAM Click driver.
Key functions:
mram_write_data_bytes- Function writes n bytes of data from the buffermram_read_data_bytes- Function reads n bytes of data and saves it in buffermram_enable_write_protect- Function enables or disables write protect.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief MRAM Click example
*
* # Description
* This example writes and reads from the Mram Click and displays it on the terminal.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes Click driver.
*
* ## Application Task
* Writes 10 bytes of buffer data in memory with start address 0x0001. Then reads
* 10 bytes from memory with start address 0x0001 and shows result on USB UART.
*
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "mram.h"
// ------------------------------------------------------------------ VARIABLES
static mram_t mram;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
mram_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
mram_cfg_setup( &cfg );
MRAM_MAP_MIKROBUS( cfg, MIKROBUS_1 );
mram_init( &mram, &cfg );
mram_default_cfg( &mram );
}
void application_task ( void )
{
uint8_t number_bytes_write;
uint8_t number_bytes_read;
uint16_t i;
uint8_t data_write[ 10 ] = { 1, 2, 3, 4, 5, 6, 7, 8, 9, 10 };
uint8_t data_read[ 20 ] = { 0 };
number_bytes_write = 10;
number_bytes_read = 10;
log_printf( &logger, " Data written!\r\n" );
mram_write_data_bytes ( &mram, 0x0001, data_write, number_bytes_write );
log_printf( &logger, " Read data:\r\n" );
mram_read_data_bytes ( &mram, 0x0001, data_read, number_bytes_read );
for ( i = 0; i < number_bytes_read; i++ )
{
log_printf( &logger, "%d ", ( uint16_t )data_read[ i ] );
}
log_printf( &logger, "\n" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:MRAM