Manage your bipolar stepper motors without a hassle using TB67S539FTG and STM32F302VC
Stay cool, stay efficient - the perfect motor control!
Published Jul 22, 2025
Click board™
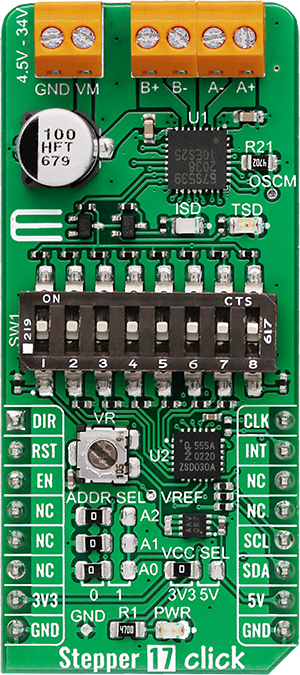
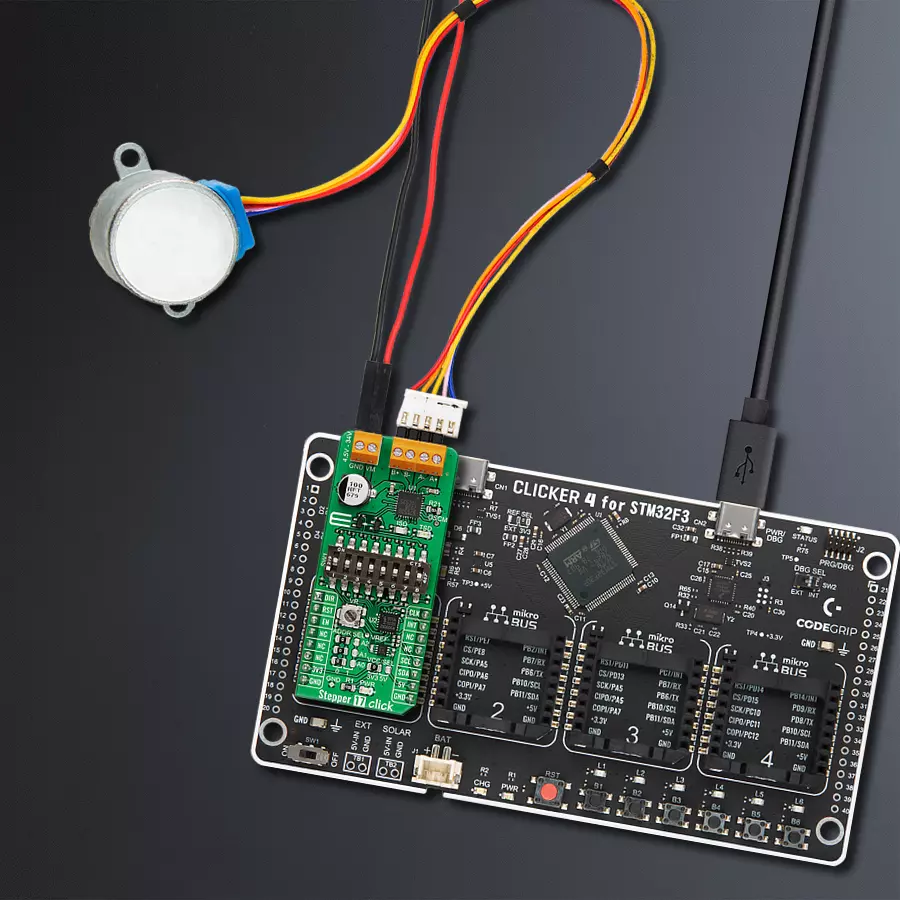
Stepper 17 Click
Dev. board
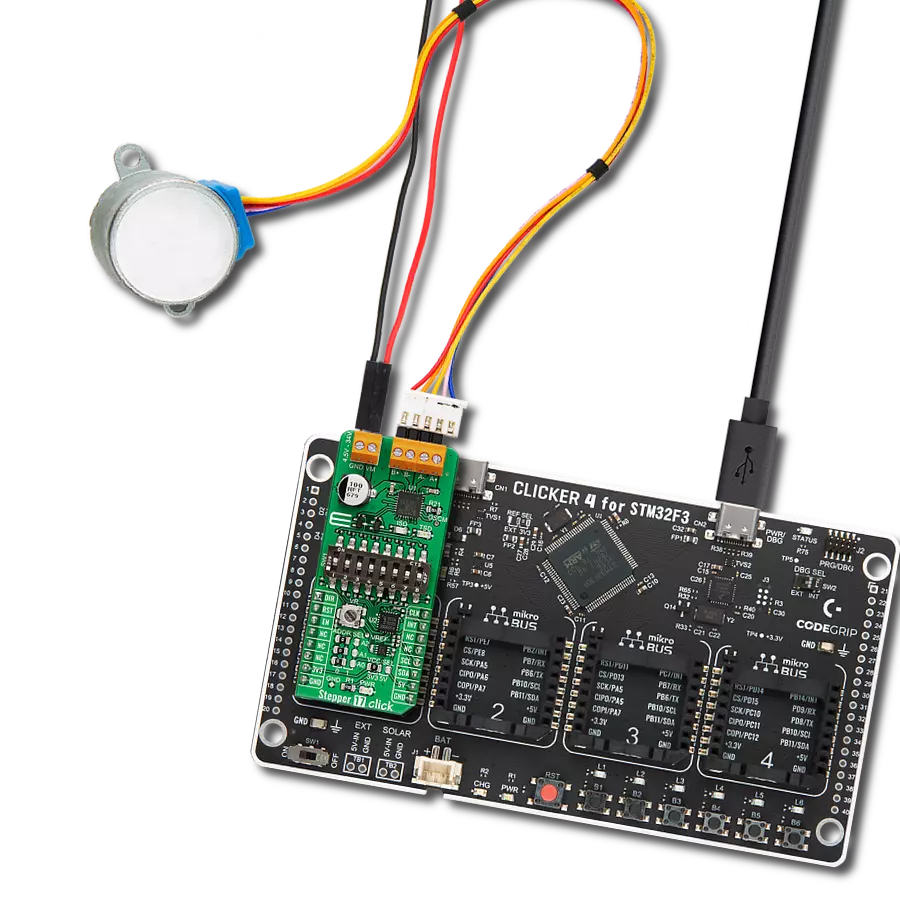
CLICKER 4 for STM32F302VCT6
Compiler
NECTO Studio
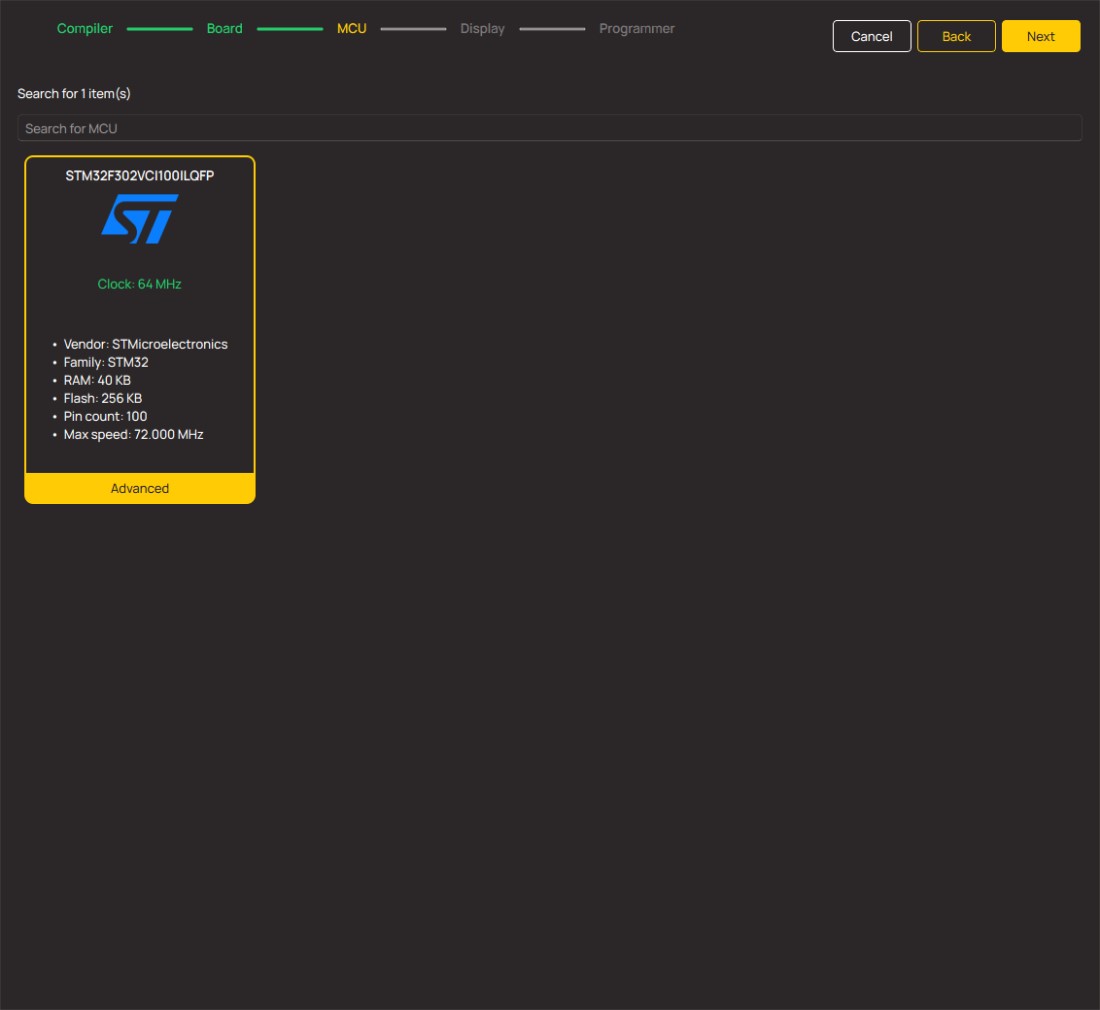
MCU
STM32F302VC
Keep your projects cool and efficient with our integrated motor-driver solution, a game-changer in bipolar stepper motor control
A
A
Hardware Overview
How does it work?
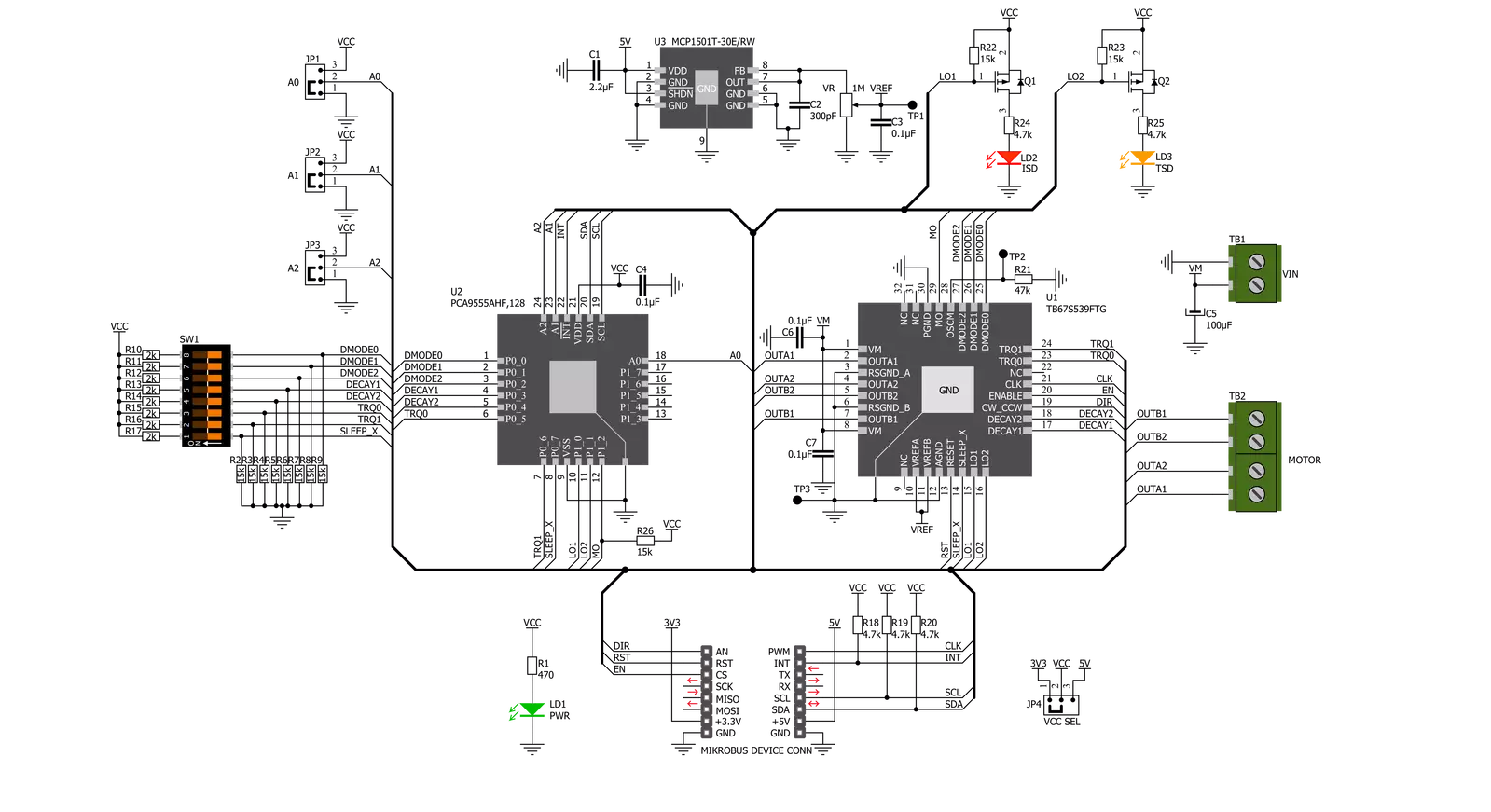
Stepper 17 Click is based on the TB67S539FTG, a two-phase bipolar stepping motor driver with resistorless current sensing from Toshiba Semiconductor. The TB67S539FTG incorporates low on-resistance DMOS FETs, which can deliver a 1.8A maximum current with a motor output voltage rating of 40V, in addition to integrated protection mechanisms such as over-current and over-temperature detection (ISD and TSD LED indicators). It supports full-step to 1/32 steps resolution for less motor noise and smoother control, with a built-in mixed decay mode, which helps to stabilize the current waveforms. Thanks to the many steps that TB67S539FTG supports, motor noise can be significantly reduced with smoother operation and more precise control. It is suited to a wide range of applications such as office automation commercial, and industrial equipment using stepping motors supporting an operational temperature range covering -20°C to +85°C. The current value is set by the reference voltage obtained by the MCP1501, a high-precision voltage regulator. The current threshold point of
the TB67S539FTG, alongside MCP1501, can be set manually using an onboard trimmer labeled as VR. In addition to the I2C communication, several GPIO pins connected to the mikroBUS™ socket pins are also used to forward the information to the MCU associated with the PCA9555A port expander. The PCA9555A also allows choosing the least significant bit (LSB) of its I2C slave address by positioning SMD jumpers labeled as ADDR SEL to an appropriate position marked as 0 and 1, alongside its interrupt feature routed to the INT pin of the mikroBUS™ socket. The CLK clock signal, routed to the PWM pin of the mikroBUS™ socket, shifts the current step and electrical angle of the motor with its every up-edge, while the Enable pin, labeled as EN and routed to the CS pin of the mikroBUS™ socket, optimizes power consumption used for power ON/OFF purposes. All circuits, including the interface pins, are inactive in this state, and the TB67S539FTG is in the form of minimum power consumption. A simple DIR pin routed to the AN pin on the mikroBUS™ socket allows MCU to manage the
direction of the stepper motor (clockwise or counterclockwise), while the RST pin of the mikroBUS™ socket initializes an electrical angle in the internal counter to set an initial position. A specific addition to this Click board™ is a multifunctional switch that allows the user to set appropriate features such as Sleep Mode Activation, Motor Torque Setting, Mixed Decay Control, and Step Resolution Setting by selecting a particular switch. The Stepper 17 Click supports an external power supply for the TB67S539FTG, which can be connected to the input terminal labeled as VM and should be within the range of 4.5V to 34V, while the stepper motor coils can be connected to the terminals labeled as B+, B-, A-, and A+. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
Clicker 4 for STM32F3 is a compact development board designed as a complete solution, you can use it to quickly build your own gadgets with unique functionalities. Featuring a STM32F302VCT6, four mikroBUS™ sockets for Click boards™ connectivity, power managment, and more, it represents a perfect solution for the rapid development of many different types of applications. At its core, there is a STM32F302VCT6 MCU, a powerful microcontroller by STMicroelectronics, based on the high-
performance Arm® Cortex®-M4 32-bit processor core operating at up to 168 MHz frequency. It provides sufficient processing power for the most demanding tasks, allowing Clicker 4 to adapt to any specific application requirements. Besides two 1x20 pin headers, four improved mikroBUS™ sockets represent the most distinctive connectivity feature, allowing access to a huge base of Click boards™, growing on a daily basis. Each section of Clicker 4 is clearly marked, offering an intuitive and clean interface. This makes working with the development
board much simpler and thus, faster. The usability of Clicker 4 doesn’t end with its ability to accelerate the prototyping and application development stages: it is designed as a complete solution which can be implemented directly into any project, with no additional hardware modifications required. Four mounting holes [4.2mm/0.165”] at all four corners allow simple installation by using mounting screws. For most applications, a nice stylish casing is all that is needed to turn the Clicker 4 development board into a fully functional, custom design.
Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M4
MCU Memory (KB)
256
Silicon Vendor
STMicroelectronics
Pin count
100
RAM (Bytes)
40960
You complete me!
Accessories
The 28BYJ-48 is an adaptable 5VDC stepper motor with a compact design, ideal for various applications. It features four phases, a speed variation ratio of 1/64, and a stride angle of 5.625°/64 steps, allowing precise control. The motor operates at a frequency of 100Hz and has a DC resistance of 50Ω ±7% at 25°C. It boasts an idle in-traction frequency greater than 600Hz and an idle out-traction frequency exceeding 1000Hz, ensuring reliability in different scenarios. With a self-positioning torque and in-traction torque both exceeding 34.3mN.m at 120Hz, the 28BYJ-48 offers robust performance. Its friction torque ranges from 600 to 1200 gf.cm, while the pull-in torque is 300 gf.cm. This motor makes a reliable and efficient choice for your stepper motor needs.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly
Start by selecting your development board and Click board™. Begin with the CLICKER 4 for STM32F302VCT6 as your development board.









Software Support
Library Description
This library contains API for Stepper 17 Click driver.
Key functions:
stepper17_set_direction- This function sets the motor direction by setting the DIR pin logic state.stepper17_drive_motor- This function drives the motor for the specific number of steps at the selected speed.stepper17_set_step_mode- This function sets the step mode resolution settings.
Open Source
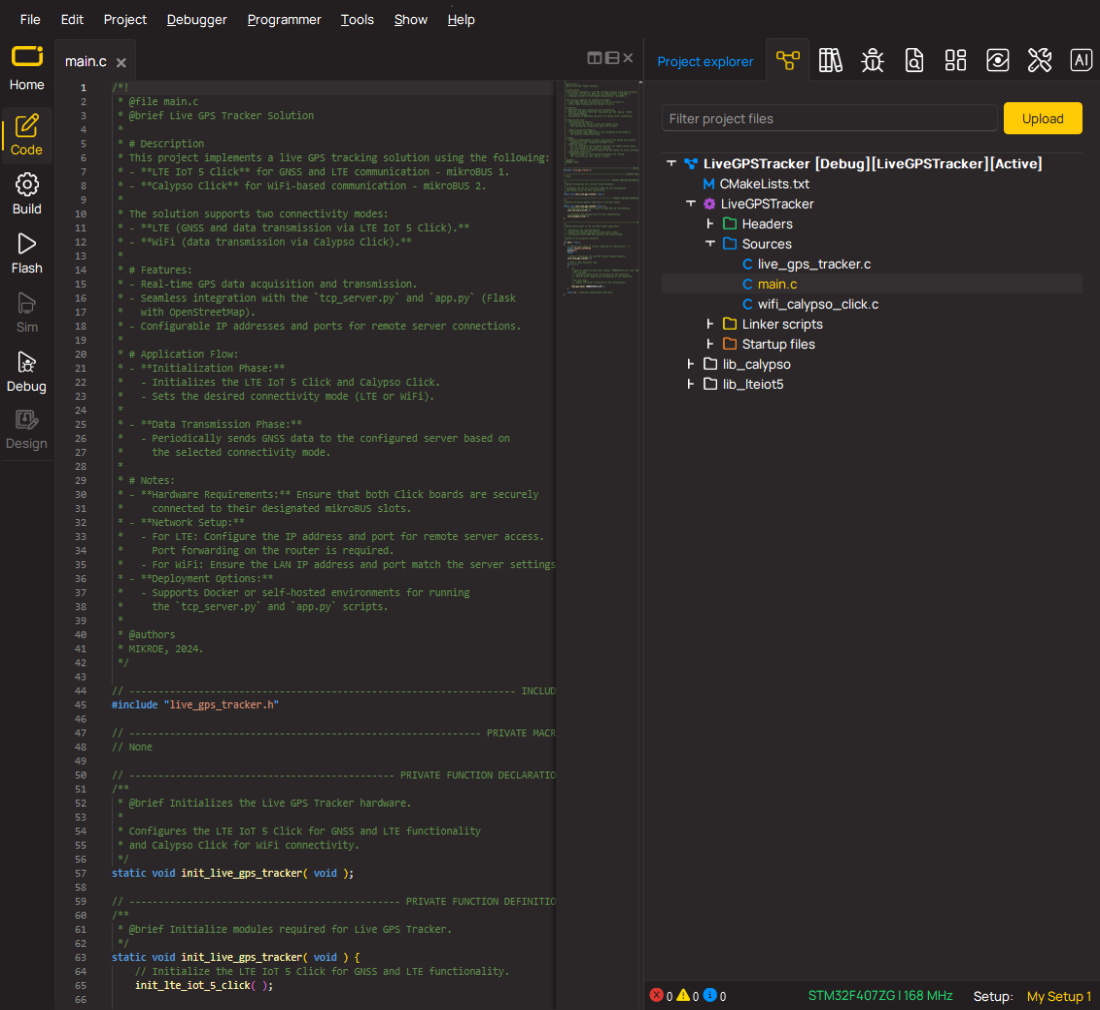
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief Stepper 17 Click example
*
* # Description
* This example demonstrates the use of the Stepper 17 Click board by driving the
* motor in both directions for a desired number of steps.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and performs the Click default configuration.
*
* ## Application Task
* Drives the motor clockwise for 200 full steps and then counter-clockiwse for 400 quarter
* steps with 2 seconds delay before changing the direction. All data is being logged on
* the USB UART where you can track the program flow.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "stepper17.h"
static stepper17_t stepper17;
static log_t logger;
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
stepper17_cfg_t stepper17_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
stepper17_cfg_setup( &stepper17_cfg );
STEPPER17_MAP_MIKROBUS( stepper17_cfg, MIKROBUS_1 );
if ( I2C_MASTER_ERROR == stepper17_init( &stepper17, &stepper17_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( STEPPER17_ERROR == stepper17_default_cfg ( &stepper17 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
log_printf ( &logger, " Move 200 full steps clockwise \r\n\n" );
stepper17_set_step_mode ( &stepper17, STEPPER17_MODE_FULL_STEP );
stepper17_set_direction ( &stepper17, STEPPER17_DIR_CW );
stepper17_drive_motor ( &stepper17, 200, STEPPER17_SPEED_FAST );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf ( &logger, " Move 400 quarter steps counter-clockwise \r\n\n" );
stepper17_set_step_mode ( &stepper17, STEPPER17_MODE_QUARTER_STEP );
stepper17_set_direction ( &stepper17, STEPPER17_DIR_CCW );
stepper17_drive_motor ( &stepper17, 400, STEPPER17_SPEED_FAST );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Stepper