Develop advanced IoT projects for automation, monitoring, and control with TCM 515Z and MK64FN1M0VDC12
Communication based on the 2.4 GHz IEEE 802.15.4 radio standard

Published Jul 28, 2023
Click board™
EnOcean 2 Click
Dev. board
Clicker 2 for Kinetis
Compiler
NECTO Studio
MCU
MK64FN1M0VDC12
For developers working on innovative, environmentally friendly, wireless applications in home automation, industrial control, and smart building projects
A
A
Hardware Overview
How does it work?
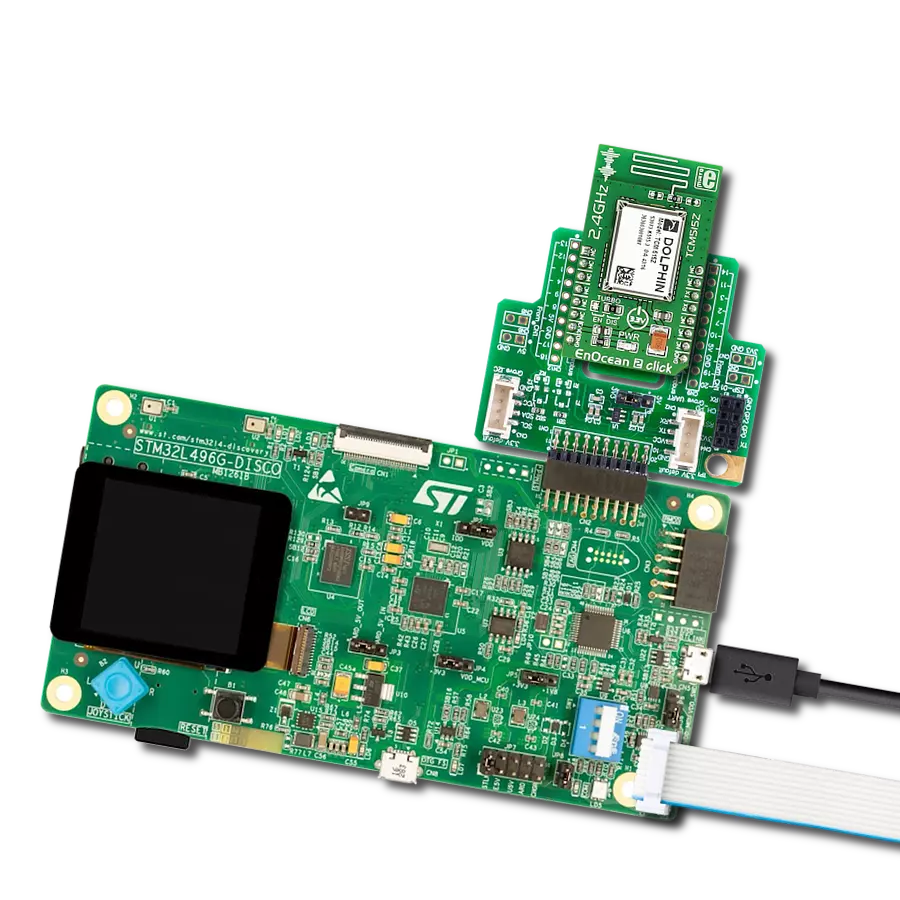
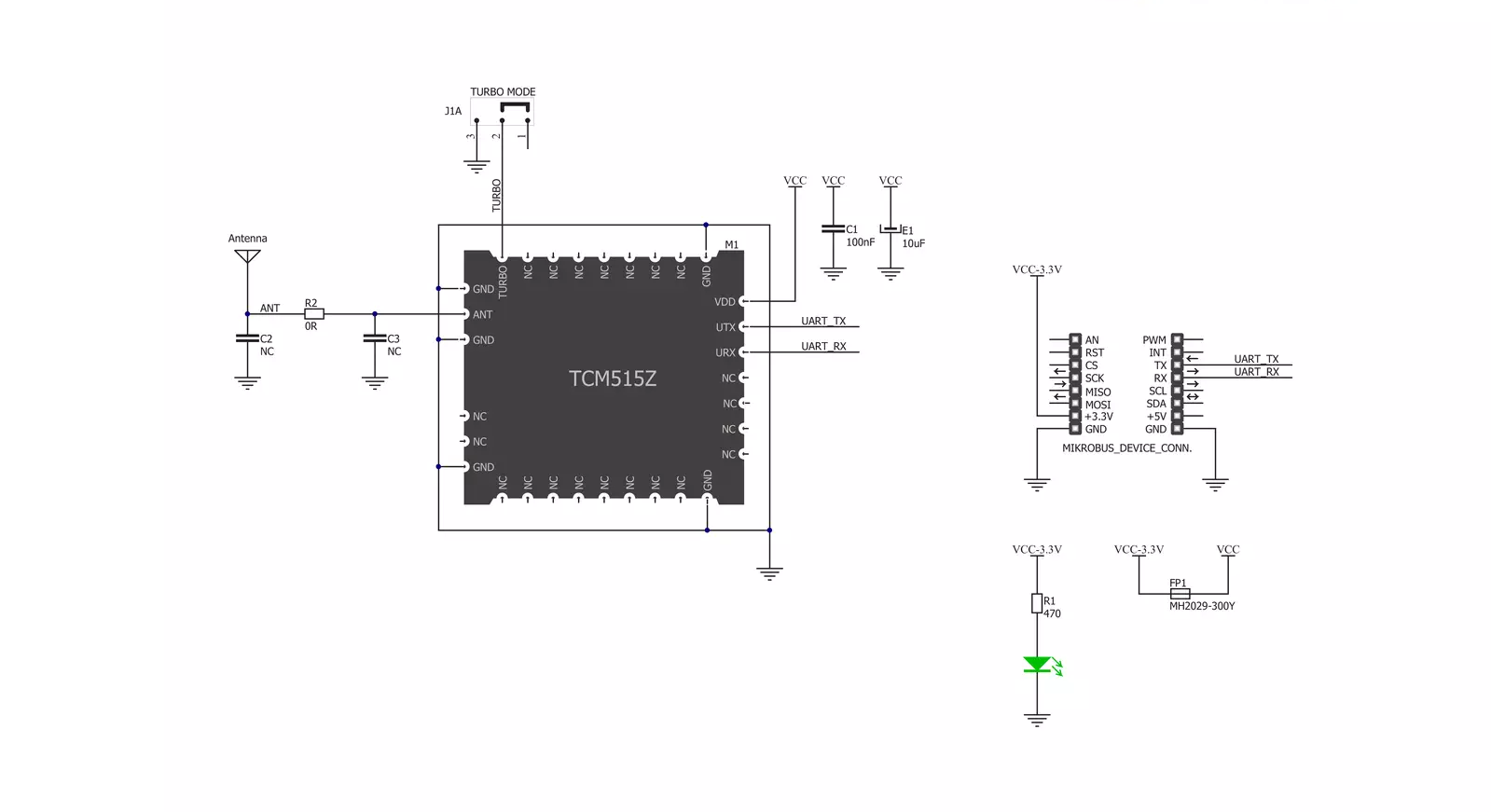
EnOcean 2 Click is based on the TCM 515Z, a bidirectional transceiver gateway from EnOcean. Z in marking stands for a Zigbee, which uses a worldwide available 2.4GHz frequency and provides a transparent radio link between EnOcean 2.4 GHz devices and an external host connected via the standardized ESP3 interface (EnOcean SerialProtocol V3). The module has low current consumption for receiving and transmitting modes with a typical receiving sensitivity of -95dBm over the onboard 2.4GHz 50ohm whip antenna. It generates its electrical energy by converting electromagnetic, solar, and thermoelectric energy to work as a battery-free self-powered device. The TCM 515Z module supports all radio channels of the IEEE 802.15.4 standard, from 11 to channel 26 (the highest frequency). The channel can be set by
a host MCU. TCM 515Z transmits and receives radio telegrams, while the host MCU is responsible for the proper decoding of received telegrams and proper encoding of telegrams to be transmitted. The frame structure consists of PHY Header, MAC Header, MAC Payload, and AMC Trailer. The TCM 515Z module can work in the Receive and Transmit modes and be set into a low-power sleep mode for a defined period. Depending on the usage scenes, it can achieve a range of up to 50m in open spaces, halls, and more. In corridors, plasterboard, or wood walls, it can achieve typically 15m of range. The fire-safety walls, elevator shafts, staircases, and similar areas act as shielded areas. The angle at which the transmitted signal hits the wall is very important, along with the effective wall thickness, and should be considered when
choosing the place to position the device. The EnOcean module uses the UART interface with commonly used UART RX and TX pins as its default communication protocol for communication with the host microcontroller. Additionally, changing the default ESP3 interface speed at power up from 57600 bits per second to 460800 bits per second over the TURBO jumper by connecting the 0ohm resistor to EN position. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. However, the Click board™ comes equipped with a library containing functions and an example code that can be used as a reference for further development.

Features overview
Development board
Clicker 2 for Kinetis is a compact starter development board that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit ARM Cortex-M4F microcontroller, the MK64FN1M0VDC12 from NXP Semiconductors, two mikroBUS™ sockets for Click board™ connectivity, a USB connector, LED indicators, buttons, a JTAG programmer connector, and two 26-pin headers for interfacing with external electronics. Its compact design with clear and easily recognizable silkscreen markings allows you to build gadgets with unique functionalities and
features quickly. Each part of the Clicker 2 for Kinetis development kit contains the components necessary for the most efficient operation of the same board. In addition to the possibility of choosing the Clicker 2 for Kinetis programming method, using a USB HID mikroBootloader or an external mikroProg connector for Kinetis programmer, the Clicker 2 board also includes a clean and regulated power supply module for the development kit. It provides two ways of board-powering; through the USB Micro-B cable, where onboard voltage regulators provide the appropriate voltage levels to each component on the board, or
using a Li-Polymer battery via an onboard battery connector. All communication methods that mikroBUS™ itself supports are on this board, including the well-established mikroBUS™ socket, reset button, and several user-configurable buttons and LED indicators. Clicker 2 for Kinetis is an integral part of the Mikroe ecosystem, allowing you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M4
MCU Memory (KB)
1024
Silicon Vendor
NXP
Pin count
121
RAM (Bytes)
262144
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Clicker 2 for Kinetis as your development board.













Software Support
Library Description
This library contains API for EnOcean 2 Click driver.
Key functions:
enocean2_init_rx_buff- EnOcean Serial Protocol ( ESP3 ) module initializationenocean2_rx- The function push recieved character to ring bufferenocean2_packet_recieve- Implements state machine for recieving packets. It should be called in loop
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief EnOcean2 Click example
*
* # Description
* This example reads and processes data from EnOcean 2 Clicks.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes driver init and initializes chip and sets callback handler.
*
* ## Application Task
* It checks if a switch is pressed, and logs an appropriate message to the uart terminal.
*
* ## Additional Function
* - enocean2_process ( ) - The general process of collecting data the module sends.
* - callback_handler ( enocean2_packet_t *packet ) - Checks if a new response message is
* ready and executes a response message parsing. Once the response
* parsing is done, shows the response message on the uart terminal.
* - decode_command ( uint8_t cmd ) - Detect which of the 4 buttons is pressed.
*
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "enocean2.h"
#include "string.h"
#define PROCESS_COUNTER 10
#define PROCESS_RX_BUFFER_SIZE 200
// ------------------------------------------------------------------ VARIABLES
static enocean2_t enocean2;
static enocean2_ring_buffer_t enocean2_rb;
static enocean2_rx_data_t enocean2_rx_data;
static log_t logger;
uint8_t rx_buffer[ PROCESS_RX_BUFFER_SIZE ] = { 0 };
uint8_t data_buffer[ PROCESS_RX_BUFFER_SIZE ] = { 0 };
char uart_rx_buffer[ PROCESS_RX_BUFFER_SIZE ] = { 0 };
// ------------------------------------------------------- ADDITIONAL FUNCTIONS
static void clear_app_buf ( void )
{
Delay_ms ( 200 );
enocean2_generic_read( &enocean2, uart_rx_buffer, PROCESS_RX_BUFFER_SIZE );
memset( uart_rx_buffer, 0, PROCESS_RX_BUFFER_SIZE );
}
static void decode_command ( uint8_t cmd )
{
if ( cmd == 0x12 )
{
log_printf( &logger, "-- Button 1 detect --\r\n" );
clear_app_buf( );
}
else if ( cmd == 0x14 )
{
log_printf( &logger, "-- Button 2 detect --\r\n" );
clear_app_buf( );
}
else if ( cmd == 0x18 )
{
log_printf( &logger, "-- Button 3 detect --\r\n" );
clear_app_buf( );
}
else if ( cmd == 0x22 )
{
log_printf( &logger, "-- Button 4 detect --\r\n" );
clear_app_buf( );
}
}
static void callback_handler ( enocean2_packet_t *packet )
{
uint8_t sequence_number = 0;
if ( packet->type == ENOCEAN2_TYPE_RADIO_802_15_4 )
{
if ( sequence_number != packet->data_buffer[ ENOCEAN2_SEQUENCE_NUMBER_OFFSET ] )
{
decode_command( packet->data_buffer[ ENOCEAN2_COMMAND_OFFSET ] );
}
}
}
static void enocean2_process ( void )
{
int16_t rsp_size;
uint8_t check_buf_cnt;
uint8_t process_cnt = PROCESS_COUNTER;
while( process_cnt != 0 )
{
rsp_size = enocean2_generic_read( &enocean2, uart_rx_buffer, PROCESS_RX_BUFFER_SIZE );
if ( rsp_size > 0 )
{
// Validation of the received data
for ( check_buf_cnt = 0; check_buf_cnt < rsp_size; check_buf_cnt++ )
{
enocean2_rx( &enocean2_rb, uart_rx_buffer[ check_buf_cnt ] );
enocean2_packet_recieve( &enocean2, &enocean2_rb );
}
// Clear RX buffer
memset( uart_rx_buffer, 0, PROCESS_RX_BUFFER_SIZE );
}
else
{
process_cnt--;
// Process delay
Delay_ms ( 100 );
}
}
}
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
enocean2_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
enocean2_cfg_setup( &cfg );
ENOCEAN2_MAP_MIKROBUS( cfg, MIKROBUS_1 );
enocean2_init( &enocean2, &cfg );
enocean2_rx_data.rx_buffer = &rx_buffer[ 0 ];
enocean2_rx_data.rx_size = ENOCEAN2_RX_BUFFER_SIZE;
enocean2_rx_data.data_buffer = &data_buffer[ 0 ];
enocean2_rx_data.data_size = ENOCEAN2_RX_BUFFER_SIZE;
enocean2_init_rx_buff( &enocean2, &enocean2_rb, &enocean2_rx_data );
enocean2_set_callback_handler( &enocean2, callback_handler );
}
void application_task ( void )
{
enocean2_process( );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:2.4 GHz Transceivers