Power up audio with MAX9744 and STM32F302VC and amplify your experience
Hear the music like never before!

Published Jun 08, 2023
Click board™
2x20W Amp Click
Dev. board
UNI Clicker
Compiler
NECTO Studio
MCU
STM32F302VC
Set a new standard for quality with a powerful and reliable audio amplifier
A
A
Hardware Overview
How does it work?
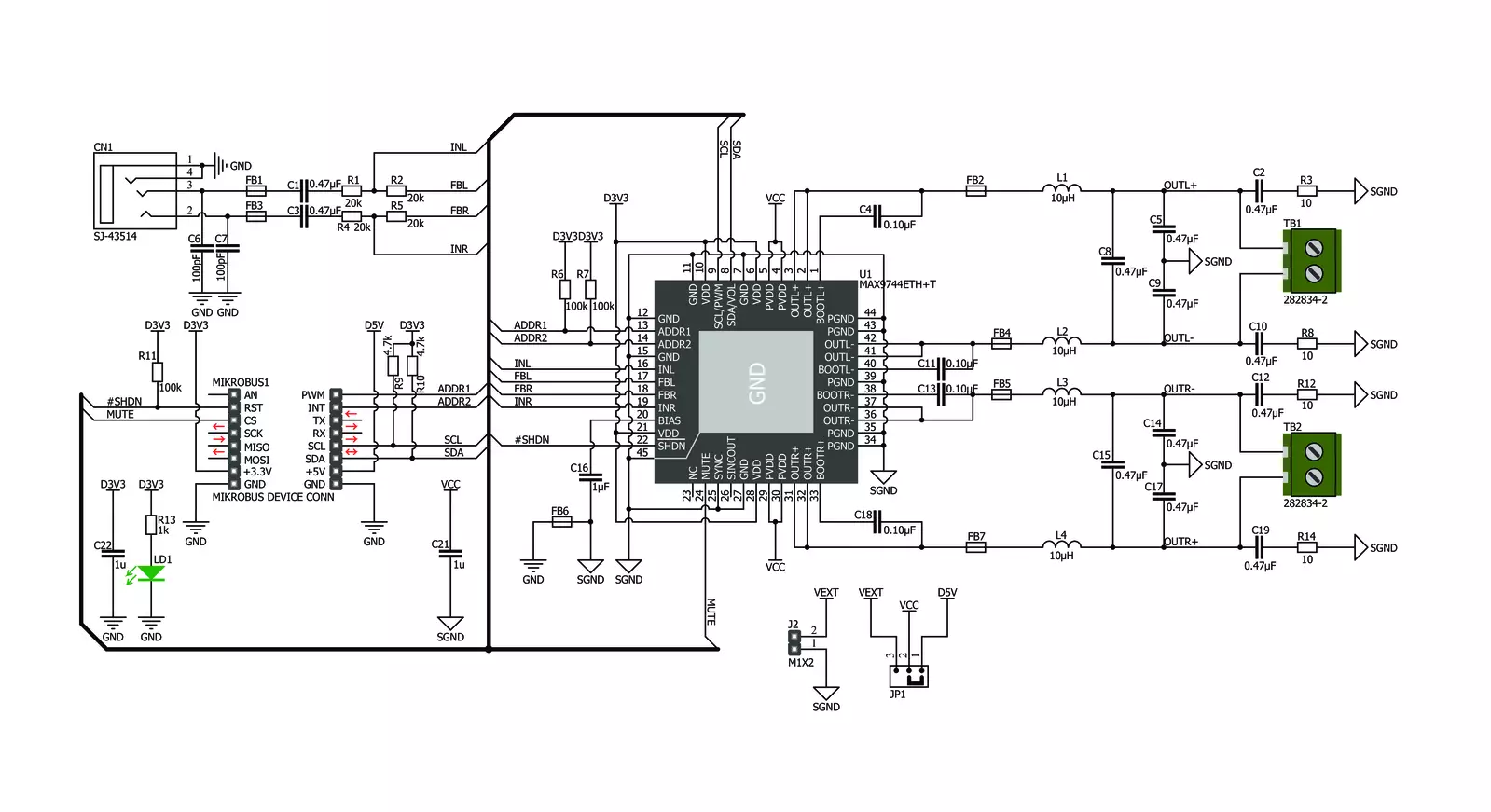
2x20W Amp Click is based on the MAX9744, a stereo class D audio power amplifier from Analog Devices. This click brings the Class AB sound performance with Class D efficiency, representing the perfect combination for your speakers. 2x20W Amp Click also offers 64-step volume control, single-supply operation, adjustable gain, and industry-leading click-and-pop suppression. Class-D amplifiers produce a series of square-shaped pulses of fixed amplitude but varying duty cycles, representing the amplitude variations of the analog signal. The output of the modulator is used to gate the output transistors on and off alternately. The high efficiency of a Class D amplifier is due to the switching operation of the output stage transistors. Since the transistors are either fully ON or fully OFF, they spend a small amount of time in the linear region and consume little power. In a Class D amplifier,
the output transistors act as current steering switches and don't use much additional power. A low-pass filter made of an inductor and a capacitor is used to produce a path for the low-frequencies of the audio signal (leaving the high-frequency pulses behind). When the output current exceeds the current limit, 5.5A (typ), the MAX9744 disables the outputs and initiates a 220µs startup sequence. The shutdown and startup sequence is repeated until the output fault is removed. When the die temperature exceeds the thermal-shutdown threshold, the MAX9744 outputs are disabled. The MAX9744 features a shutdown mode that reduces power consumption and extends battery life. Driving SHDN pin low places the device in low-power shutdown mode. Connect the SHDN pin to digital high for normal operation. The Click features volume control operation using an analog voltage input or
the I2C interface for maximum flexibility. To set the device to analog mode, connect ADDR1 and ADDR2 to GND. In analog mode, SDA/VOL pin is an analog input for volume control. The analog input range is ratiometric between 0.9 x VDD and 0.1 x VDD, where 0.9 x VDD = full mute and 0.1 x VDD = full volume. Use ADDR1 and ADDR2 to select I2C mode. Three addresses can be chosen, allowing multiple devices on a single bus. In the I2C mode, the volume is controlled by choosing the speaker volume control register in the command byte. There are 64 volume settings, where the lowest setting is full mute. The board logic is powered by the 3.3V supply over the mikroBUS™ socket, while the amplifier circuit is powered by the onboard 5V power supply or an external source that can go from 4.5V to 14V. The jumper JP1 must be positioned in the EXT position to use an external power source.

Features overview
Development board
UNI Clicker is a compact development board designed as a complete solution that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It supports a wide range of microcontrollers, such as different ARM, PIC32, dsPIC, PIC, and AVR from various vendors like Microchip, ST, NXP, and TI (regardless of their number of pins), four mikroBUS™ sockets for Click board™ connectivity, a USB connector, LED indicators, buttons, a debugger/programmer connector, and two 26-pin headers for interfacing with external electronics. Thanks to innovative manufacturing technology, it allows you to build
gadgets with unique functionalities and features quickly. Each part of the UNI Clicker development kit contains the components necessary for the most efficient operation of the same board. In addition to the possibility of choosing the UNI Clicker programming method, using a third-party programmer or CODEGRIP/mikroProg connected to onboard JTAG/SWD header, the UNI Clicker board also includes a clean and regulated power supply module for the development kit. It provides two ways of board-powering; through the USB Type-C (USB-C) connector, where onboard voltage regulators provide the appropriate voltage levels to each component on the board, or using a Li-Po/Li
Ion battery via an onboard battery connector. All communication methods that mikroBUS™ itself supports are on this board (plus USB HOST/DEVICE), including the well-established mikroBUS™ socket, a standardized socket for the MCU card (SiBRAIN standard), and several user-configurable buttons and LED indicators. UNI Clicker is an integral part of the Mikroe ecosystem, allowing you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
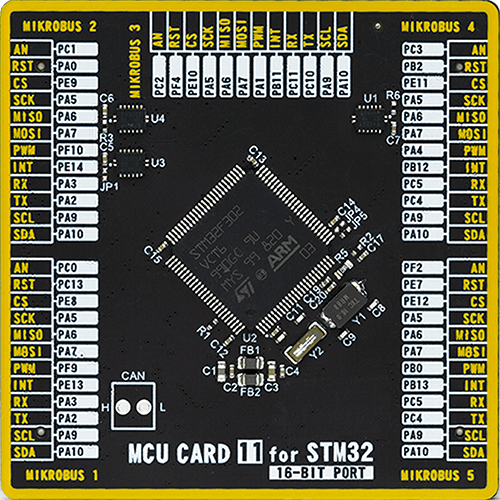
MCU Card / MCU
Type
8th Generation
Architecture
ARM Cortex-M4
MCU Memory (KB)
256
Silicon Vendor
STMicroelectronics
Pin count
100
RAM (Bytes)
40960
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the UNI Clicker as your development board.














Software Support
Library Description
This library contains API for 2x20W Amp Click driver.
Key functions:
c2x20wamp_mode_play- Set Play mode of the amplifier functionc2x20wamp_set_volume- Set volume of the amplifier functionc2x20wamp_mode_mute- Set Mute mode of the amplifier function
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief c2x20WAmp Click example
*
* # Description
* This application changes the volume level.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization driver enable's - I2C,
* start write log and enable amplifire of 2x20W Amp Click board.
*
* ## Application Task
* This is a example which demonstrates the use of 2x20W Amp Click board.
* This examples first activates operation mode PLAY and set volume lvl 32,
* after that, we increase the volume level one level ten times for 5 seconds
* and we decrease the volume level one level ten times for 5 seconds.
* And finally, we set MUTE mode for next 5 seconds.
* Results are being sent to the Usart Terminal
* where you can track their changes.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "c2x20wamp.h"
// ------------------------------------------------------------------ VARIABLES
static c2x20wamp_t c2x20wamp;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
c2x20wamp_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
c2x20wamp_cfg_setup( &cfg );
C2X20WAMP_MAP_MIKROBUS( cfg, MIKROBUS_1 );
c2x20wamp_init( &c2x20wamp, &cfg );
Delay_ms ( 100 );
log_printf( &logger, "-----------------------\r\n" );
log_printf( &logger, " 2x20W Amp Click \r\n" );
log_printf( &logger, "-----------------------\r\n" );
c2x20wamp_enable( &c2x20wamp );
log_printf( &logger," Enable Amplifier \r\n" );
log_printf( &logger, "-----------------------\r\n" );
Delay_ms ( 200 );
}
void application_task ( void )
{
log_printf( &logger, " PLAY MODE \r\n" );
c2x20wamp_mode_play( &c2x20wamp );
Delay_ms ( 200 );
uint8_t volume = 32;
log_printf( &logger, " Set Volume lvl : %u \r\n", (uint16_t)volume );
log_printf( &logger, "-----------------------\r\n" );
c2x20wamp_set_volume( &c2x20wamp, volume );
log_printf( &logger, "- - - - - - - - - - - -\r\n" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
for ( uint8_t cnt = 0; cnt < 10; cnt++ )
{
log_printf( &logger, " Volume Up \r\n" );
c2x20wamp_volume_up( &c2x20wamp );
Delay_ms ( 100 );
}
log_printf( &logger, "- - - - - - - - - - - -\r\n" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
for ( uint8_t cnt = 0; cnt < 10; cnt++ )
{
log_printf( &logger, " Volume Down \r\n" );
c2x20wamp_volume_down( &c2x20wamp );
Delay_ms ( 100 );
}
log_printf( &logger, "-----------------------\r\n" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf( &logger, " MUTE MODE \r\n" );
c2x20wamp_mode_mute( &c2x20wamp );
log_printf( &logger, "-----------------------\r\n" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END