Create bridge between TTL level UART and RS485 communication with SN75HVD12 and PIC32MX695F512L
Help electronic systems communicate over long distances and in noisy environments

Published Oct 19, 2023
Click board™
RS485 Click 3.3V
Dev. board
UNI Clicker
Compiler
NECTO Studio
MCU
PIC32MX695F512L
Provide reliable and long-distance communication between TTL-level UART and RS485 bus devices in various applications
A
A
Hardware Overview
How does it work?
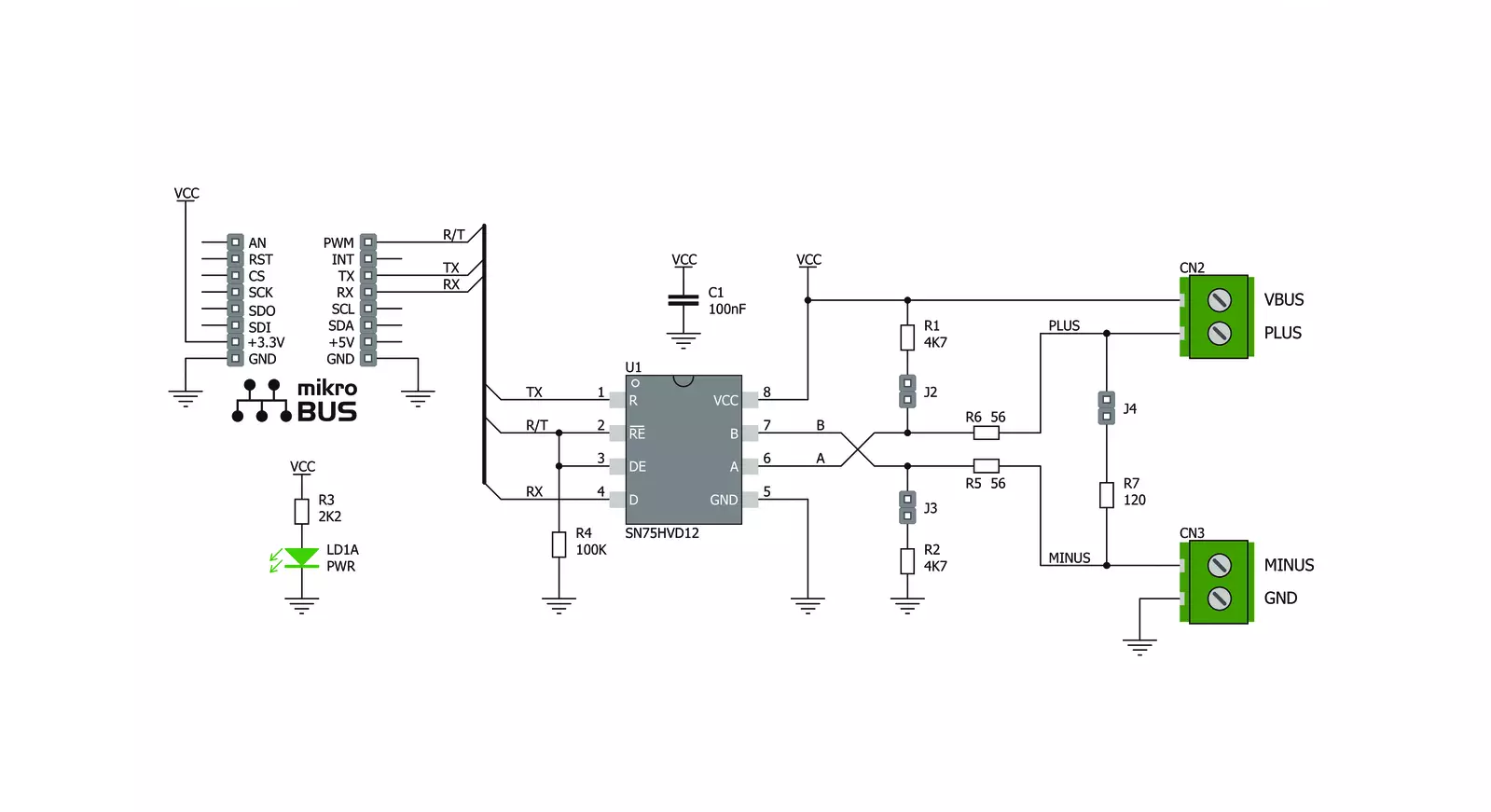
RS485 Click 3.3V is based on the SN75HVD12, an RS-485 transceiver from Texas Instruments. It is a tristate differential line driver and differential input line receiver. It is intended to be used as a physical layer device, often called PHY, providing physical interfacing of the MCU TTL level UART lines with the RS422/485 bus. It is well suited for transmitting smaller data blocks over long distances, using a twisted differential signal pair for both TX and RX signals, allowing for half-duplex asynchronous communication. The SN75HVD12 transceiver consists of separate driver and receiver sections, with Driver Enable and Receiver Enable pins used to enable the appropriate sections. The driver section drives the RS422/485 bus with the signal received on the UART RX line, while the receiver section returns data from the bus back to the MCU via the UART TX line. RS422/485 standard only specifies the electrical characteristics of the transmitter and the receiver. It does not specify or recommend any communications protocol, only the physical layer. The top layer communication protocol of choice can be used, such as the MODBUS or similar protocols. Therefore, RS485 Click 3.3V offers UART RX and TX pins routed to
the appropriate mikroBUS™ TX and RX UART pins. The MCU uses these pins to send data to the RS485 bus in a form determined by the user protocol. The SN75HVD12 IC allows signaling data rates up to 32Mbps. However, the bus length determines the maximal transfer speed: longer bus lines will result in less transfer speed. The RS422/RS485 bus needs to be terminated with the resistor on both ends (so-called parallel termination) equal to the characteristic impedance of the cable used to prevent line reflections. The RS485 standard prescribes using a twisted pair cable as the data bus. Twisted pair cable tends to cancel common-mode noise and cause cancellation of the magnetic fields generated by the current flowing through each wire, thereby reducing the effective inductance of the pair. The Click board™ is equipped with a jumper that can be used to route the termination resistor of 120 Ω between the bus lines. It is also equipped with two more jumpers, labeled as BIAS ENABLE. These jumpers enable bus biasing by using pull-up and pull-down resistors between the bus differential lines and VCC/GND, respectively, preventing certain faulty conditions when no drivers are enabled on the
bus, in addition to existing IC protection. RS485 Click 3.3V uses a standard 2-Wire UART interface to communicate with the host MCU with commonly used UART RX and TX lines. Receiver output enable (RE) and driver output enable (DE) pins of the SN75HVD12 are joined together and routed to the R/T pin of the mikroBUS™ socket. When left floating, a pull-down resistor determines the states on these pins, so you have to enable the device by writing a High logic state. Note that DE and RE pins use opposite signal polarities for the active state, making it possible to drive them with a single MCU pin. When a HIGH logic level is applied to the R/T pin, the transmitter becomes activated, while the receiver is deactivated at the same time - and vice versa. The R/T pin acts as a communication direction pin in this configuration. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. However, the Click board™ comes equipped with a library containing functions and an example code that can be used as a reference for further development.

Features overview
Development board
UNI Clicker is a compact development board designed as a complete solution that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It supports a wide range of microcontrollers, such as different ARM, PIC32, dsPIC, PIC, and AVR from various vendors like Microchip, ST, NXP, and TI (regardless of their number of pins), four mikroBUS™ sockets for Click board™ connectivity, a USB connector, LED indicators, buttons, a debugger/programmer connector, and two 26-pin headers for interfacing with external electronics. Thanks to innovative manufacturing technology, it allows you to build
gadgets with unique functionalities and features quickly. Each part of the UNI Clicker development kit contains the components necessary for the most efficient operation of the same board. In addition to the possibility of choosing the UNI Clicker programming method, using a third-party programmer or CODEGRIP/mikroProg connected to onboard JTAG/SWD header, the UNI Clicker board also includes a clean and regulated power supply module for the development kit. It provides two ways of board-powering; through the USB Type-C (USB-C) connector, where onboard voltage regulators provide the appropriate voltage levels to each component on the board, or using a Li-Po/Li
Ion battery via an onboard battery connector. All communication methods that mikroBUS™ itself supports are on this board (plus USB HOST/DEVICE), including the well-established mikroBUS™ socket, a standardized socket for the MCU card (SiBRAIN standard), and several user-configurable buttons and LED indicators. UNI Clicker is an integral part of the Mikroe ecosystem, allowing you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
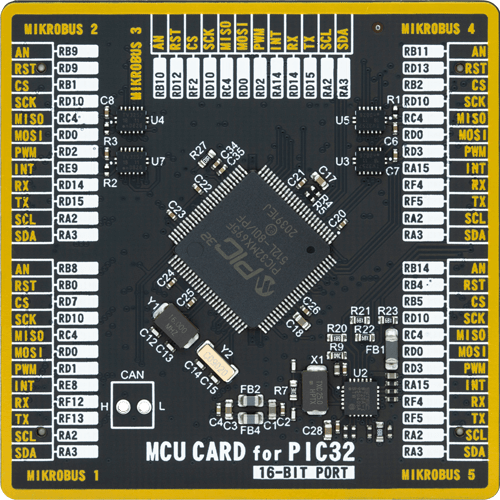
MCU Card / MCU
Type
8th Generation
Architecture
PIC32
MCU Memory (KB)
512
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
131072
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the UNI Clicker as your development board.














Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for RS485 Click 3.3V driver.
Key functions:
rs4853v3_generic_read- This function reads a desired number of data bytes by using UART serial interface.rs4853v3_send_command- This function sends a command by using UART serial interface.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief RS485 3V3 Click Example.
*
* # Description
* This example reads and processes data from RS485 3.3V Clicks.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes driver and wake-up module.
*
* ## Application Task
* Reads the received data and parses it.
*
* ## Additional Function
* - static void rs4853v3_clear_current_rsp_buf ( void ) - The general process of clearing buffer.
* - static void rs4853v3_process ( void ) - The general process of collecting the received data.
* @author Stefan Ilic
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "rs4853v3.h"
#include "string.h"
#define PROCESS_COUNTER 10
#define PROCESS_RX_BUFFER_SIZE 100
#define PROCESS_PARSER_BUFFER_SIZE 100
// ------------------------------------------------------------------ VARIABLES
#define DEMO_APP_RECEIVER
// #define DEMO_APP_TRANSMITTER
static rs4853v3_t rs4853v3;
static log_t logger;
static char current_rsp_buf[ PROCESS_PARSER_BUFFER_SIZE ];
static uint8_t send_data_cnt = 0;
unsigned char demo_message[ 9 ] = { 'M', 'i', 'k', 'r', 'o', 'E', 13, 10, 0 };
// ------------------------------------------------------- ADDITIONAL FUNCTIONS
static void rs4853v3_clear_current_rsp_buf ( void ) {
memset( current_rsp_buf, 0, PROCESS_PARSER_BUFFER_SIZE );
}
static void rs4853v3_process ( void ) {
int16_t rsp_size;
uint16_t rsp_cnt = 0;
char uart_rx_buffer[ PROCESS_RX_BUFFER_SIZE ] = { 0 };
uint8_t check_buf_cnt;
uint8_t process_cnt = PROCESS_COUNTER;
// Clear parser buffer
memset( current_rsp_buf, 0 , PROCESS_PARSER_BUFFER_SIZE );
while( process_cnt != 0 ) {
rsp_size = rs4853v3_generic_read( &rs4853v3, &uart_rx_buffer, PROCESS_RX_BUFFER_SIZE );
if ( rsp_size > 0 ) {
// Validation of the received data
for ( check_buf_cnt = 0; check_buf_cnt < rsp_size; check_buf_cnt++ ) {
if ( uart_rx_buffer[ check_buf_cnt ] == 0 ) {
uart_rx_buffer[ check_buf_cnt ] = 13;
}
}
// Storages data in parser buffer
rsp_cnt += rsp_size;
if ( rsp_cnt < PROCESS_PARSER_BUFFER_SIZE ) {
strncat( current_rsp_buf, uart_rx_buffer, rsp_size );
}
// Clear RX buffer
memset( uart_rx_buffer, 0, PROCESS_RX_BUFFER_SIZE );
}
else {
process_cnt--;
// Process delay
Delay_ms ( 100 );
}
}
}
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void ) {
log_cfg_t log_cfg;
rs4853v3_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
// Click initialization.
rs4853v3_cfg_setup( &cfg );
RS4853V3_MAP_MIKROBUS( cfg, MIKROBUS_1 );
rs4853v3_init( &rs4853v3, &cfg );
log_info( &logger, " Application Task " );
Delay_ms ( 100 );
#ifdef DEMO_APP_TRANSMITTER
log_printf( &logger, "------------------\r\n" );
log_printf( &logger, " Send data: \r\n" );
log_printf( &logger, " MikroE \r\n" );
log_printf( &logger, "------------------\r\n" );
log_printf( &logger, " Transmit data \r\n" );
Delay_ms ( 1000 );
#endif
#ifdef DEMO_APP_RECEIVER
log_printf( &logger, "------------------\r\n" );
log_printf( &logger, " Receive data \r\n" );
#endif
log_printf( &logger, "------------------\r\n" );
}
void application_task ( void ) {
#ifdef DEMO_APP_RECEIVER
rs4853v3_process( );
if ( current_rsp_buf > 0 ) {
log_printf( &logger, "%s", current_rsp_buf );
rs4853v3_clear_current_rsp_buf( );
}
#endif
#ifdef DEMO_APP_TRANSMITTER
rs4853v3_send_command( &rs4853v3, &demo_message[ 0 ] );
log_printf( &logger, "\t%s", &demo_message[ 0 ] );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
log_printf( &logger, "------------------\r\n" );
#endif
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END