Experience the efficiency of our 4-20mA current loop solution with DAC161S997 and PIC32MZ2048EFH100
Enhance your process automation

Published Aug 09, 2023
Click board™
4-20mA T 2 Click
Dev. board
Flip&Click PIC32MZ
Compiler
NECTO Studio
MCU
PIC32MZ2048EFH100
Experience precise signal transmission with our advanced analog current loop transmitter, which provides seamless connectivity and compatibility with various industrial applications
A
A
Hardware Overview
How does it work?
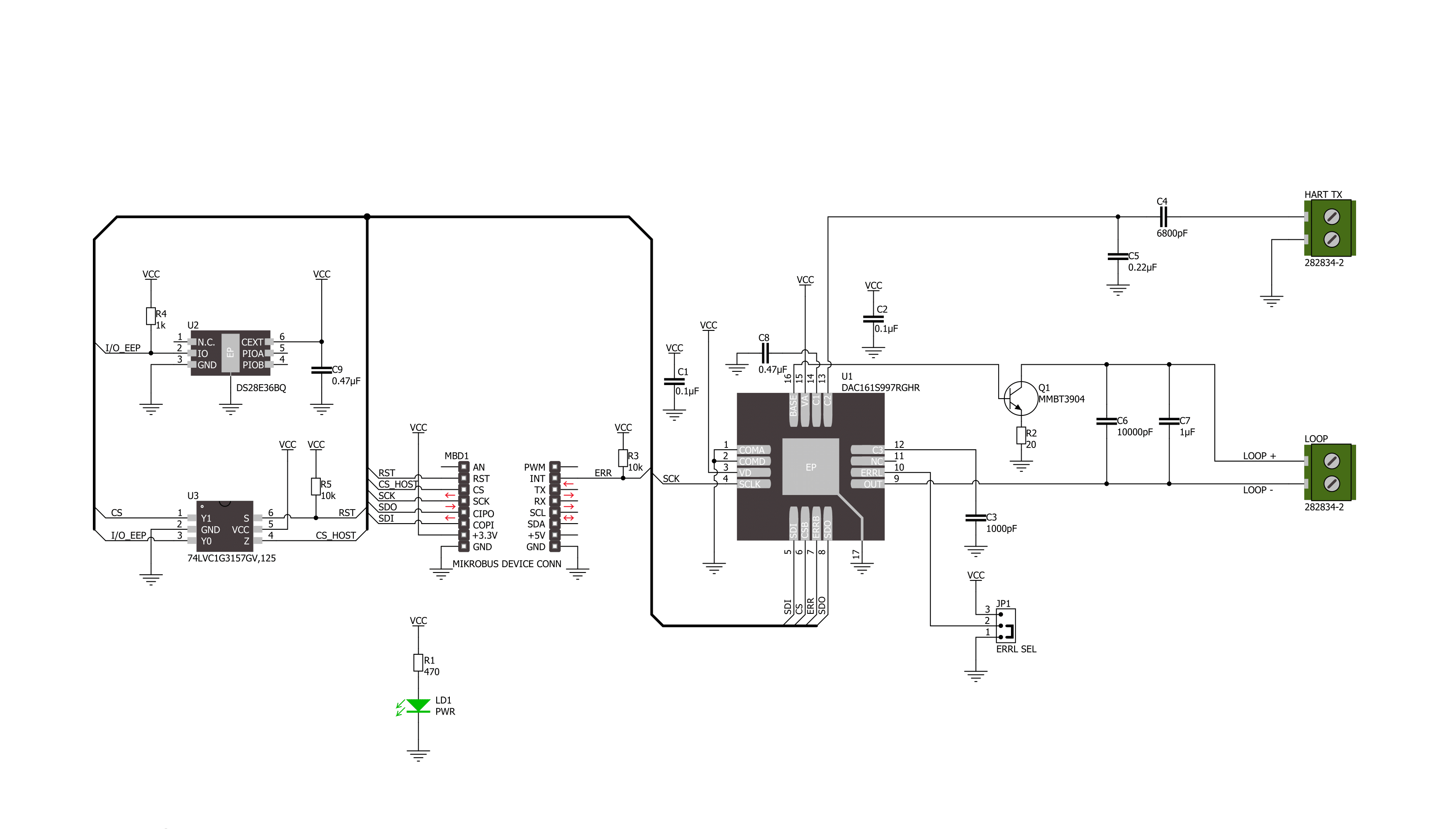
4-20mA T 2 Click is based on the DAC161S997, a low-power 16-bit ΣΔ digital-to-analog converter (DAC) from Texas Instruments, realized as a ΣΔ modulator. Next to ΣΔ DAC, the DAC161S997 also contains an internal ultra-low power voltage reference and an internal oscillator to reduce power and component count in compact loop-powered applications. This architecture, where DAC's output current represents a multiplied copy of the filtered modulator output, ensures an excellent linearity performance while minimizing the device's power consumption. In addition to an industry-standard 4-20 mA current loop over the LOOP terminal, the DAC161S997 also has the possibility of a simple Highway Addressable
Remote Transducer (HART) modulator interfacing through an onboard HART TX terminal. It allows the injection of FSK-modulated digital data into the 4-20mA current loop. This Click board™ communicates with MCU using a 4-wire SPI serial interface with a maximum frequency of 10MHz, for data transfer and configuration of the DAC functions. The DAC161S997 supports both Mode 0 and Mode 3 of the SPI protocol. 4-20mA T 2 Click comes with an additional feature, as an interrupt, available on the ERR pin of the mikroBUS™ socket, the loop-error detection/reporting feature. By default, the DAC161S997 detects and reports several types of errors: loop error, SPI timeout error (channel error), frame error, and alarm current. In
the case of a fault condition or during the initial Power-Up sequence, the DAC161S997 will output current in either the upper or lower error current band. The band's choice is user-selectable via the appropriate position of an onboard jumper ERRL SEL, while the current error value is programmable through the SPI interface. This Click board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. Also, it comes equipped with a library containing functions and an example code that can be used, as a reference, for further development.

Features overview
Development board
Flip&Click PIC32MZ is a compact development board designed as a complete solution that brings the flexibility of add-on Click boards™ to your favorite microcontroller, making it a perfect starter kit for implementing your ideas. It comes with an onboard 32-bit PIC32MZ microcontroller, the PIC32MZ2048EFH100 from Microchip, four mikroBUS™ sockets for Click board™ connectivity, two USB connectors, LED indicators, buttons, debugger/programmer connectors, and two headers compatible with Arduino-UNO pinout. Thanks to innovative manufacturing technology,
it allows you to build gadgets with unique functionalities and features quickly. Each part of the Flip&Click PIC32MZ development kit contains the components necessary for the most efficient operation of the same board. In addition, there is the possibility of choosing the Flip&Click PIC32MZ programming method, using the chipKIT bootloader (Arduino-style development environment) or our USB HID bootloader using mikroC, mikroBasic, and mikroPascal for PIC32. This kit includes a clean and regulated power supply block through the USB Type-C (USB-C) connector. All communication
methods that mikroBUS™ itself supports are on this board, including the well-established mikroBUS™ socket, user-configurable buttons, and LED indicators. Flip&Click PIC32MZ development kit allows you to create a new application in minutes. Natively supported by Mikroe software tools, it covers many aspects of prototyping thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

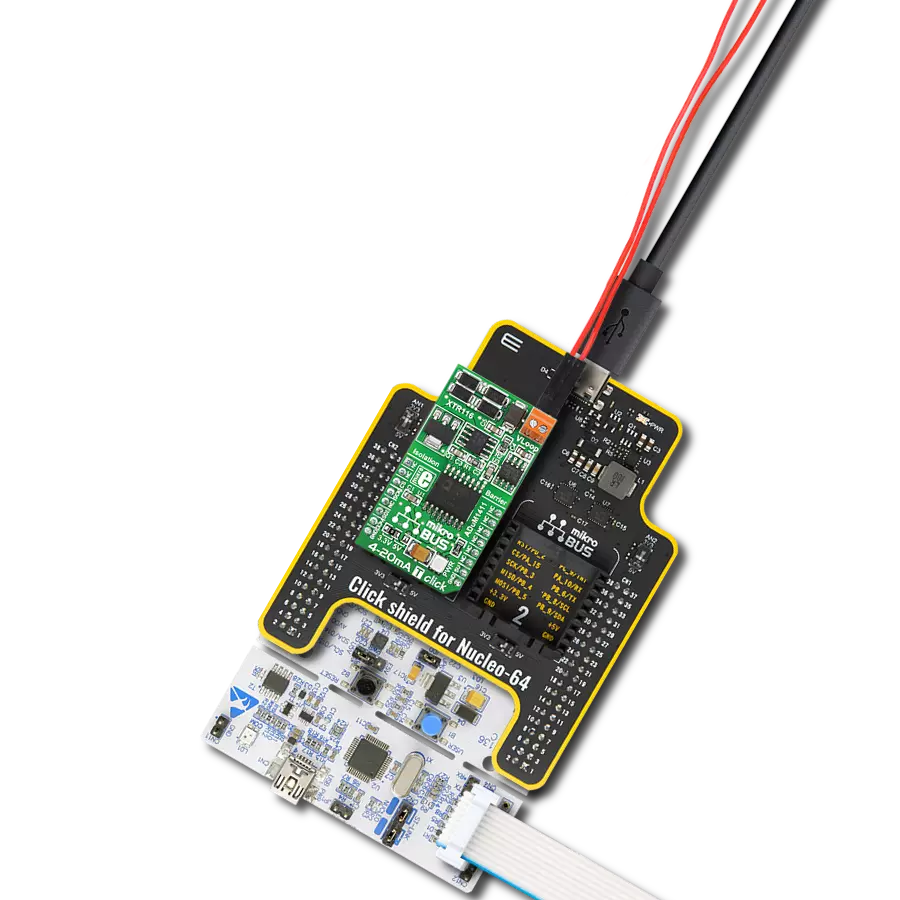
Start by selecting your development board and Click board™. Begin with the Flip&Click PIC32MZ as your development board.














Track your results in real time
Application Output
1. Application Output - In Debug mode, the 'Application Output' window enables real-time data monitoring, offering direct insight into execution results. Ensure proper data display by configuring the environment correctly using the provided tutorial.

2. UART Terminal - Use the UART Terminal to monitor data transmission via a USB to UART converter, allowing direct communication between the Click board™ and your development system. Configure the baud rate and other serial settings according to your project's requirements to ensure proper functionality. For step-by-step setup instructions, refer to the provided tutorial.

3. Plot Output - The Plot feature offers a powerful way to visualize real-time sensor data, enabling trend analysis, debugging, and comparison of multiple data points. To set it up correctly, follow the provided tutorial, which includes a step-by-step example of using the Plot feature to display Click board™ readings. To use the Plot feature in your code, use the function: plot(*insert_graph_name*, variable_name);. This is a general format, and it is up to the user to replace 'insert_graph_name' with the actual graph name and 'variable_name' with the parameter to be displayed.

Software Support
Library Description
This library contains API for 4-20mA T 2 Click driver.
Key functions:
c420mat2_set_output_current- 4-20mA T 2 set output current functionc420mat2_get_status- 4-20mA T 2 set status functionc420mat2_set_lower_limit- 4-20mA T 2 set lower limit function
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief 4-20mA T 2 Click example
*
* # Description
* This example demonstrates the use of 4-20mA T 2 Click board™.
* This driver provides functions to configure
* analog output current transfer over an industry standard 4-20mA current loop.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization of SPI module and log UART.
* After driver initialization, default settings turn on the device.
*
* ## Application Task
* This example demonstrates the use of the 4-20mA T 2 Click board™.
* This example periodically changes the analog output current transfer
* from 4mA to 20mA and display status every 5 seconds.
* Results are being sent to the UART Terminal, where you can track their changes.
*
* @author Nenad Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "c420mat2.h"
static c420mat2_t c420mat2;
static log_t logger;
static c420mat2_status_t status;
void display_status ( void )
{
log_printf( &logger, " Status: \r\n" );
if ( C420MAT2_STATUS_ERROR == status.ferr_sts )
{
log_printf( &logger, " - A frame error has occurred.\r\n" );
}
else
{
log_printf( &logger, " - No frame error occurred.\r\n" );
}
if ( C420MAT2_STATUS_ERROR == status.spi_timeout_err )
{
log_printf( &logger, " - The SPI interface has not received a valid command.\r\n" );
}
else
{
log_printf( &logger, " - The SPI interface has received a valid command.\r\n" );
}
if ( C420MAT2_STATUS_ERROR == status.loop_sts )
{
log_printf( &logger, " - A status loop error has occurred.\r\n" );
}
else
{
log_printf( &logger, " - No status loop error has occurred.\r\n" );
}
if ( C420MAT2_STATUS_ERROR == status.curr_loop_sts )
{
log_printf( &logger, " - A current loop error is occurring.\r\n" );
}
else
{
log_printf( &logger, " - No current loop error is occurring.\r\n" );
}
log_printf( &logger, " ----------------------------\r\n" );
}
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
c420mat2_cfg_t c420mat2_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
c420mat2_cfg_setup( &c420mat2_cfg );
C420MAT2_MAP_MIKROBUS( c420mat2_cfg, MIKROBUS_1 );
if ( SPI_MASTER_ERROR == c420mat2_init( &c420mat2, &c420mat2_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( C420MAT2_ERROR == c420mat2_default_cfg ( &c420mat2 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
log_printf( &logger, " -----------------------------\r\n" );
Delay_ms ( 100 );
}
void application_task ( void )
{
if ( C420MAT2_OK == c420mat2_set_output_current( &c420mat2, 4.0 ) )
{
log_printf( &logger, " Loop Current: 4.0 mA \r\n" );
log_printf( &logger, " - - - - - - - - - - - - - - -\r\n" );
if ( C420MAT2_OK == c420mat2_get_status ( &c420mat2, &status ) )
{
display_status( );
}
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
if ( C420MAT2_OK == c420mat2_set_output_current( &c420mat2, 10.0 ) )
{
log_printf( &logger, " Loop Current: 10.0 mA \r\n" );
log_printf( &logger, " - - - - - - - - - - - - - - -\r\n" );
if ( C420MAT2_OK == c420mat2_get_status ( &c420mat2, &status ) )
{
display_status( );
}
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
if ( C420MAT2_OK == c420mat2_set_output_current( &c420mat2, 15.0 ) )
{
log_printf( &logger, " Loop Current: 15.0 mA \r\n" );
log_printf( &logger, " - - - - - - - - - - - - - - -\r\n" );
if ( C420MAT2_OK == c420mat2_get_status ( &c420mat2, &status ) )
{
display_status( );
}
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
if ( C420MAT2_OK == c420mat2_set_output_current( &c420mat2, 20.0 ) )
{
log_printf( &logger, " Loop Current: 20.0 mA \r\n" );
log_printf( &logger, " - - - - - - - - - - - - - - -\r\n" );
if ( C420MAT2_OK == c420mat2_get_status ( &c420mat2, &status ) )
{
display_status( );
}
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Current