Design a transmitter in a 4-20mA current loop standard with XTR116 and PIC18LF26K42
Transmit analog signals (like sensor data) over long distances in industrial settings
Published Nov 01, 2023
Click board™
4-20 mA T Click
Dev. board
EasyPIC v8
Compiler
NECTO Studio
MCU
PIC18LF26K42
Achieve accurate current scaling and output limit functions within the 4-20mA current loop
A
A
Hardware Overview
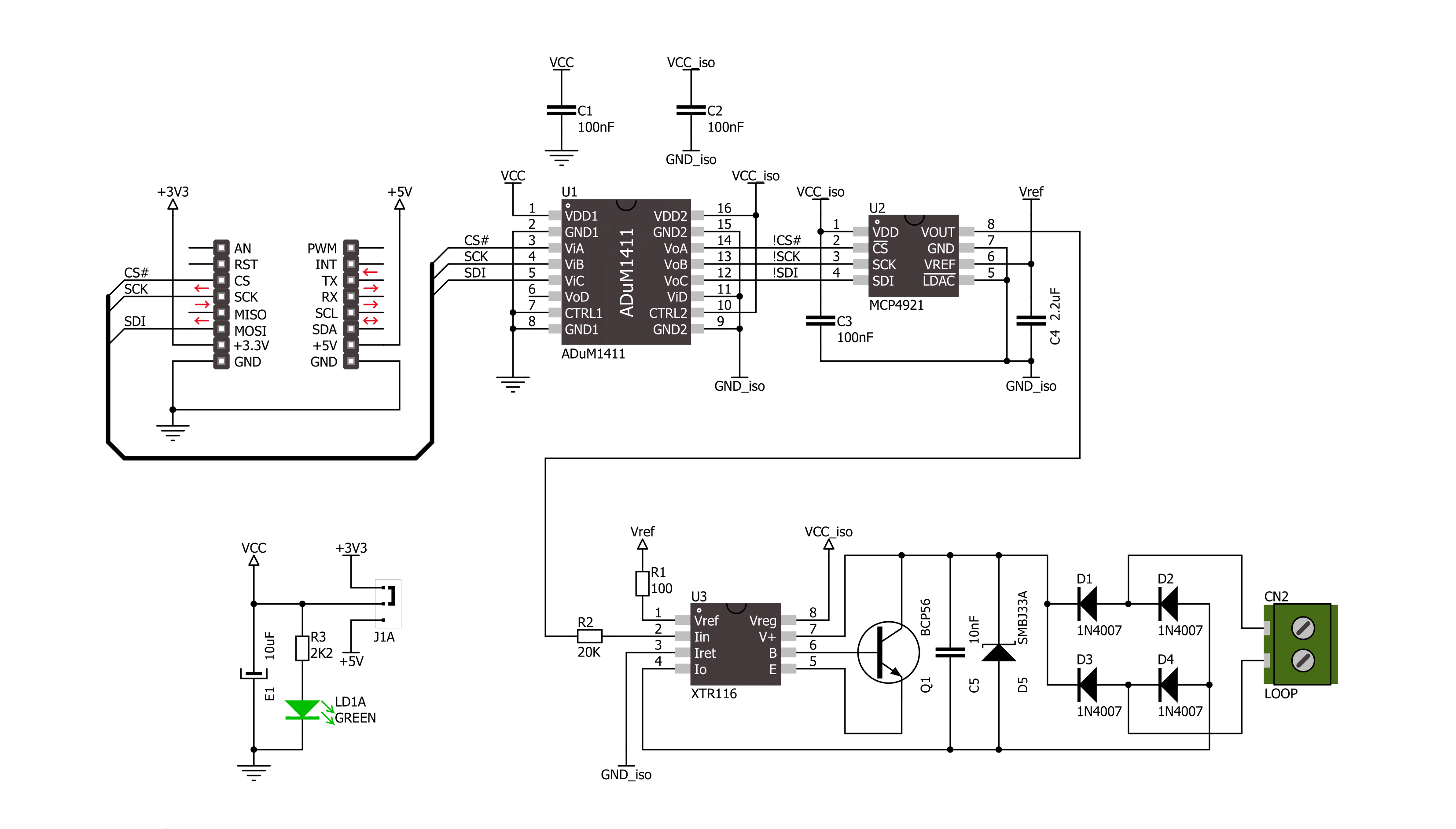
How does it work?
4-20mA T Click is based on the XTR116, a two-wire current transmitter from Texas Instruments. The XTR116 can provide accurate current scaling and output current limit functions with precision current output converters. It is designed to transmit analog 4 to 20mA signals over an industry-standard current loop. On this board, the output loop current from the XTR116 goes through the bridge rectifier to a VLOOP screw terminal. The diode bridge causes a 1.4V loss in loop supply voltage. Wide loop supply range can be between 7.5V and 36V
with a low span and nonlinearity error. As input offset voltages on the XTR116 are small, this board uses MCP4921, a 12-bit DAC from Microchip with optional 2x buffer output and an SPI interface. Thanks to the XTR116’s integrated power regulator and reference voltage block, the MCP4921 receives its power supply and the reference voltage necessary for correct data conversion. It communicates with the host MCU via three mikroBUS™ SPI lines over an isolator ADuM1411 from Analog Devices, a quad-channel 10Mbps data
rate digital isolator, to make sure higher voltages cannot harm the target microcontroller. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via an onboard jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. Also, this Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used as a reference for further development.

Features overview
Development board
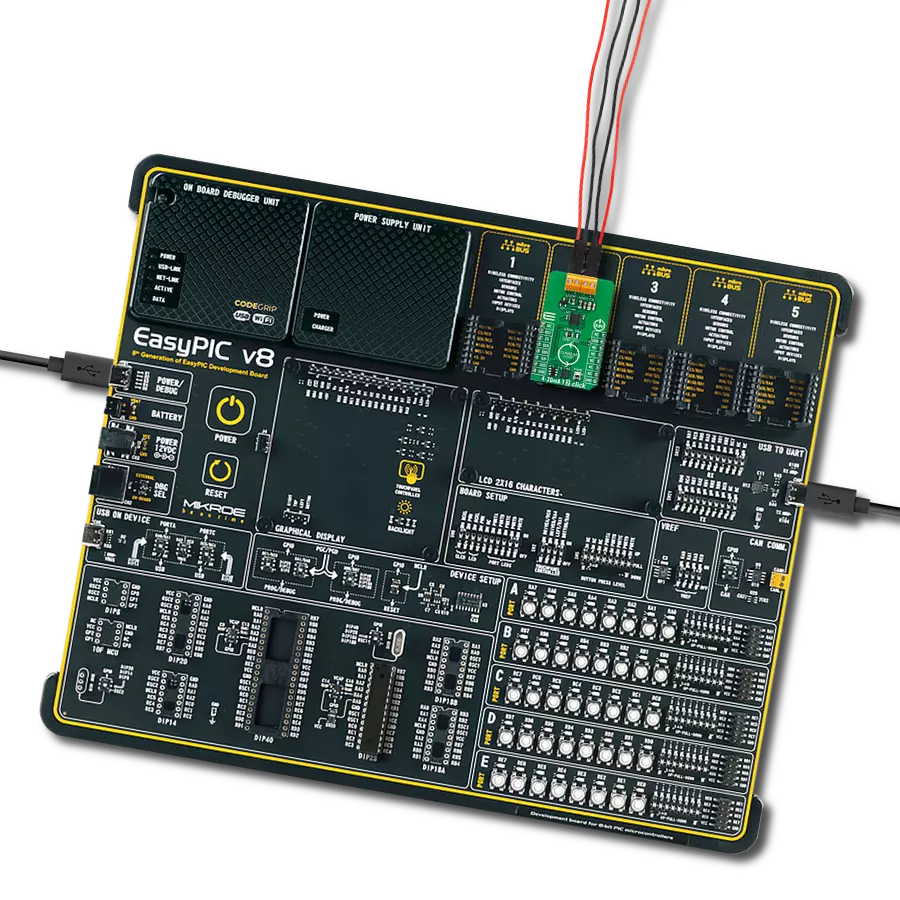
EasyPIC v8 is a development board specially designed for the needs of rapid development of embedded applications. It supports many high pin count 8-bit PIC microcontrollers from Microchip, regardless of their number of pins, and a broad set of unique functions, such as the first-ever embedded debugger/programmer. The development board is well organized and designed so that the end-user has all the necessary elements, such as switches, buttons, indicators, connectors, and others, in one place. Thanks to innovative manufacturing technology, EasyPIC v8 provides a fluid and immersive working experience, allowing access anywhere and under any
circumstances at any time. Each part of the EasyPIC v8 development board contains the components necessary for the most efficient operation of the same board. In addition to the advanced integrated CODEGRIP programmer/debugger module, which offers many valuable programming/debugging options and seamless integration with the Mikroe software environment, the board also includes a clean and regulated power supply module for the development board. It can use a wide range of external power sources, including a battery, an external 12V power supply, and a power source via the USB Type-C (USB-C) connector.
Communication options such as USB-UART, USB DEVICE, and CAN are also included, including the well-established mikroBUS™ standard, two display options (graphical and character-based LCD), and several different DIP sockets. These sockets cover a wide range of 8-bit PIC MCUs, from the smallest PIC MCU devices with only eight up to forty pins. EasyPIC v8 is an integral part of the Mikroe ecosystem for rapid development. Natively supported by Mikroe software tools, it covers many aspects of prototyping and development thanks to a considerable number of different Click boards™ (over a thousand boards), the number of which is growing every day.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC
MCU Memory (KB)
64
Silicon Vendor
Microchip
Pin count
28
RAM (Bytes)
4096
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

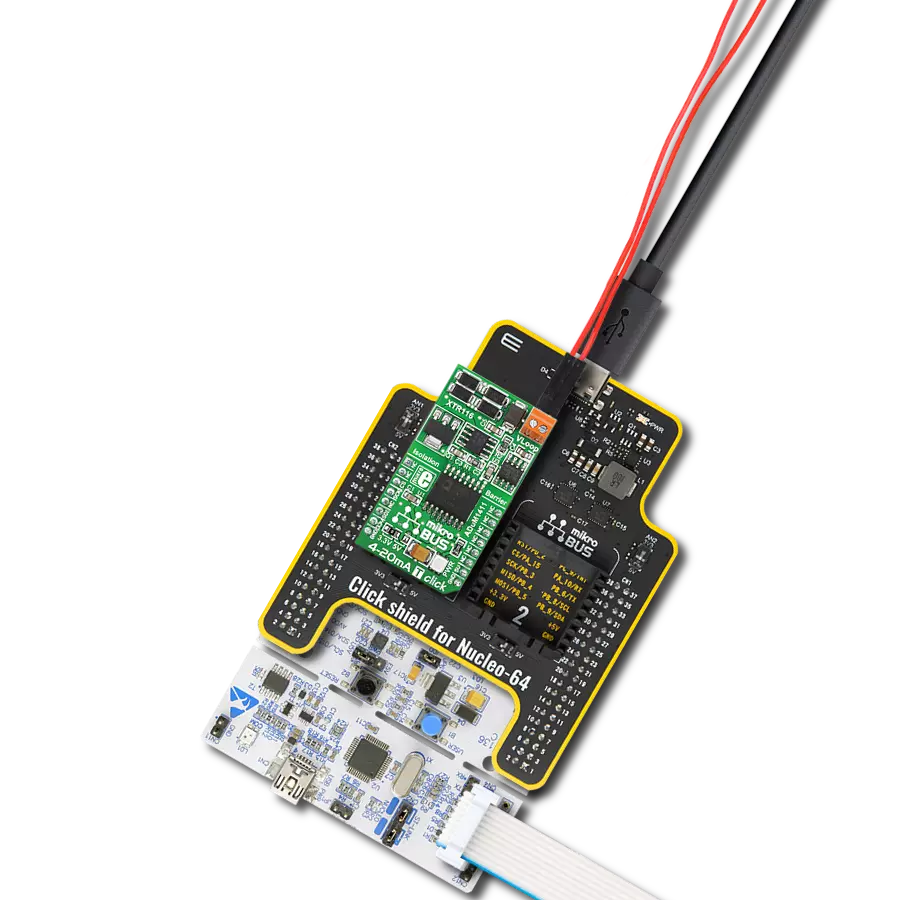
Start by selecting your development board and Click board™. Begin with the EasyPIC v8 as your development board.














Software Support
Library Description
This library contains API for 4-20mA T Click driver.
Key functions:
c420mat_dac_output- This function sets the output of DACc420mat_set_i_out- This function sets the output current to selected value
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief C420mat Click example
*
* # Description
* This aplication changes the value of the output current.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes Click SPI driver.
*
* ## Application Task
* Periodically changes Iout value.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "c420mat.h"
// ------------------------------------------------------------------ VARIABLES
static c420mat_t c420mat;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
c420mat_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
c420mat_cfg_setup( &cfg );
C420MAT_MAP_MIKROBUS( cfg, MIKROBUS_1 );
c420mat_init( &c420mat, &cfg );
}
void application_task ( void )
{
c420mat_set_i_out( &c420mat, 56 ); // sets Iout to 5.6mA
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
c420mat_set_i_out( &c420mat, 158 ); // sets Iout to 15.8mA
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Current