Experience groundbreaking UWB technology with DWM1000 and PIC32MZ2048EFM100
Where every centimeter counts

Published Nov 08, 2023
Click board™
UWB Click
Dev. board
Curiosity PIC32 MZ EF
Compiler
NECTO Studio
MCU
PIC32MZ2048EFM100
Our UWB transceiver sets a new standard in 2-way ranging and TDOA systems, ensuring 10cm accuracy for applications such as indoor positioning, asset management, and beyond.
A
A
Hardware Overview
How does it work?
UWB Click is based on the DWM1000, UWB-compliant wireless transceiver module from Qorvo. RF components, Qorvo UWB transceiver, and other components reside on-module. DWM1000 enables cost-effective and reduced complexity integration of UWB communications and ranging features, greatly accelerating design implementation. This module enables the location of objects in real-time location systems (RTLS) to a precision of 10cm indoors, high data rate communications up to 6.8 Mbps, and excellent communications range of up to 300m thanks to coherent receiver techniques. The module contains an on-board 38.4 MHz reference crystal, which has been trimmed in production to reduce the initial frequency error to approximately 2 ppm, using the transceiver’s internal on-chip crystal trimming circuit. The DWM1000 module communicates with MCU using the standard SPI serial interface with a maximum SPI frequency of 20 MHz. This module also has several GPIO pins, while in this case
two of them are used to drive LED indicators that notify the user which configuration of the transceiver is used (TX or RX). Also, it possesses Reset and Interrupt pins routed to the INT and RST pin of the mikroBUS™. When power is applied to the DWM1000, the RST pin is driven low by internal circuitry as part of its power-up sequence. RST remains low until the on-module crystal oscillator has powered up and its output is suitable for use by the rest of the device, at which time RST is stated high. RST pin may also be used as an output to reset external circuitry as part of system bring-up as power is applied. Always-On (AON) memory can be used to retain DWM1000 configuration data during the lowest power operational states when the on-chip voltage regulators are disabled. Depending on the end-use applications and the system design, DWM1000 settings may need to be tuned. To help with this tuning several built-in functions such as continuous wave TX and continuous packet transmission can be enabled. To maximize range,
DWM1000 transmit power spectral density (PSD) should be set to the maximum allowable for the geographic region in which it will be used. As the module contains an integrated antenna, the transmit power can only be measured over the air. The DWM1000 provides the facility to adjust the transmit power, and these adjustments can be used to maximize transmit power whilst meeting the regulatory spectral mask. This Click board™ uses the SPI communication interface. It is designed to be operated only with 3.3V logic levels. A proper logic voltage level conversion should be performed before the Click board™ is used with MCUs with logic levels of 5V. More information about the DWM1000’s functionality, electrical specifications, and typical performance can be found in the attached datasheet. However, the Click board™ comes equipped with a library that contains easy to use functions and a usage example that may be used as a reference for the development.

Features overview
Development board
Curiosity PIC32 MZ EF development board is a fully integrated 32-bit development platform featuring the high-performance PIC32MZ EF Series (PIC32MZ2048EFM) that has a 2MB Flash, 512KB RAM, integrated FPU, Crypto accelerator, and excellent connectivity options. It includes an integrated programmer and debugger, requiring no additional hardware. Users can expand
functionality through MIKROE mikroBUS™ Click™ adapter boards, add Ethernet connectivity with the Microchip PHY daughter board, add WiFi connectivity capability using the Microchip expansions boards, and add audio input and output capability with Microchip audio daughter boards. These boards are fully integrated into PIC32’s powerful software framework, MPLAB Harmony,
which provides a flexible and modular interface to application development a rich set of inter-operable software stacks (TCP-IP, USB), and easy-to-use features. The Curiosity PIC32 MZ EF development board offers expansion capabilities making it an excellent choice for a rapid prototyping board in Connectivity, IOT, and general-purpose applications.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic

Step by step
Project assembly

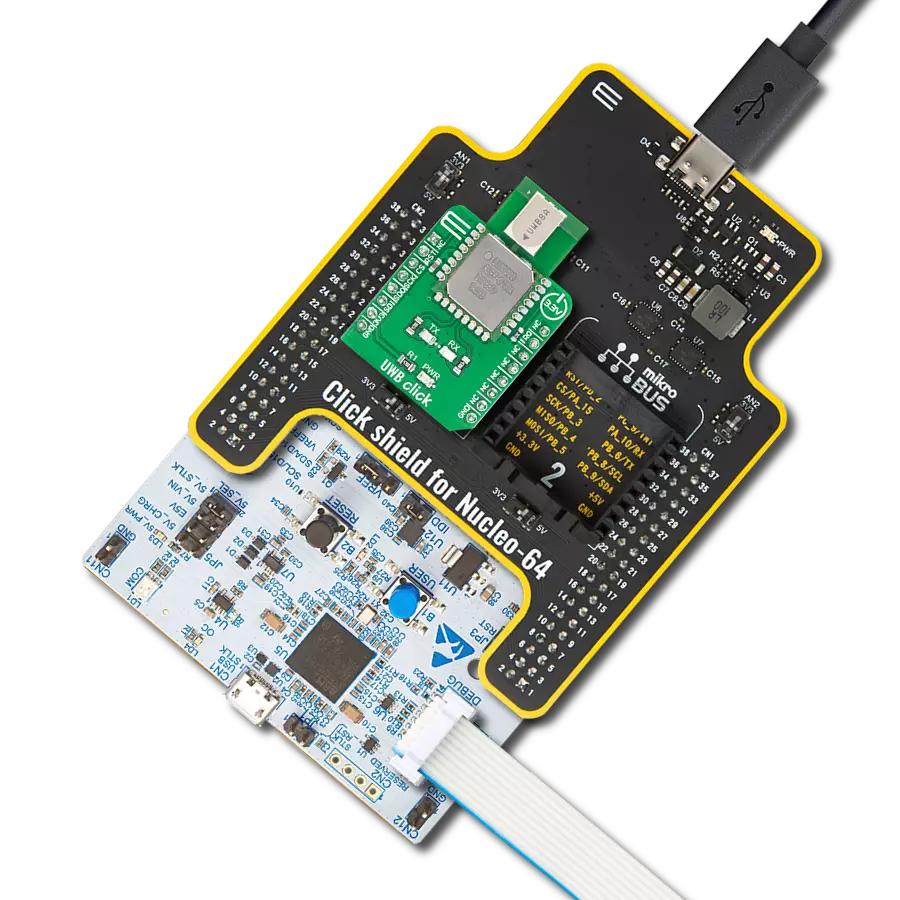
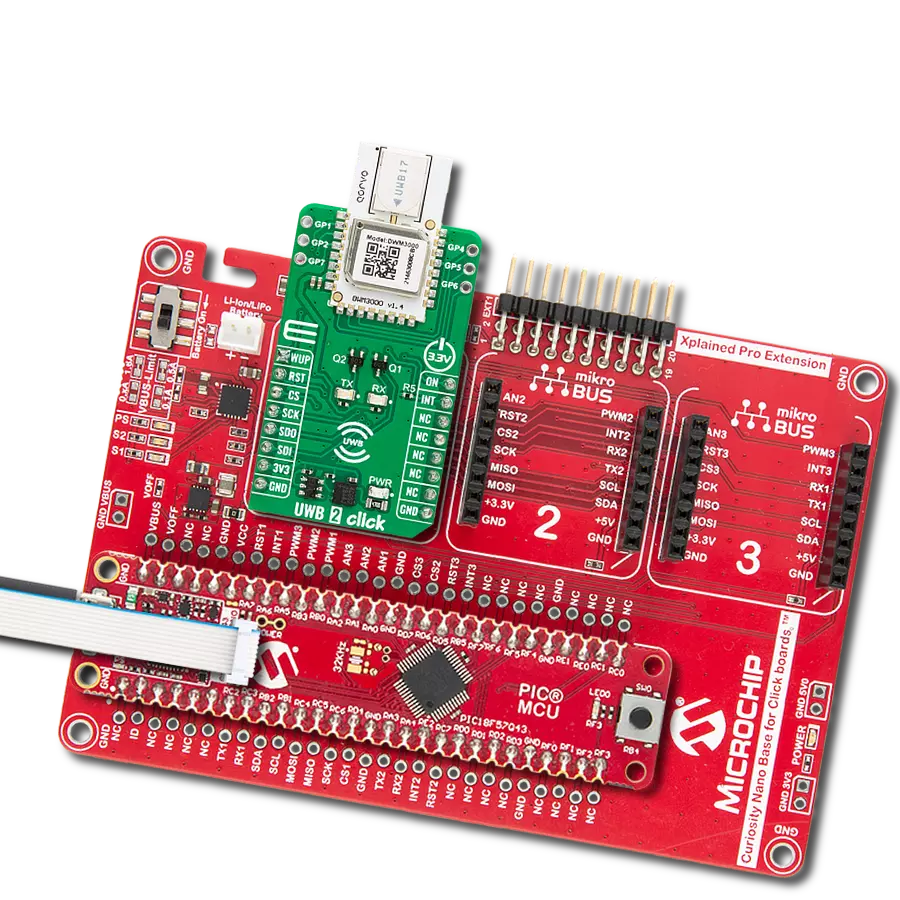
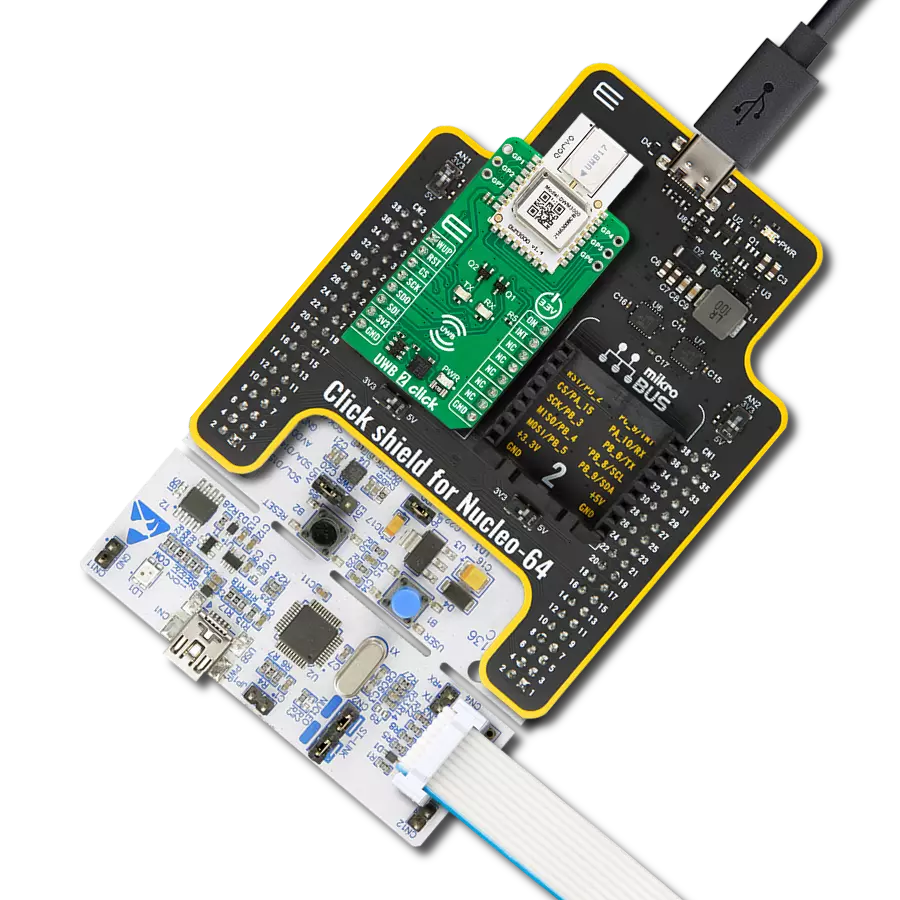
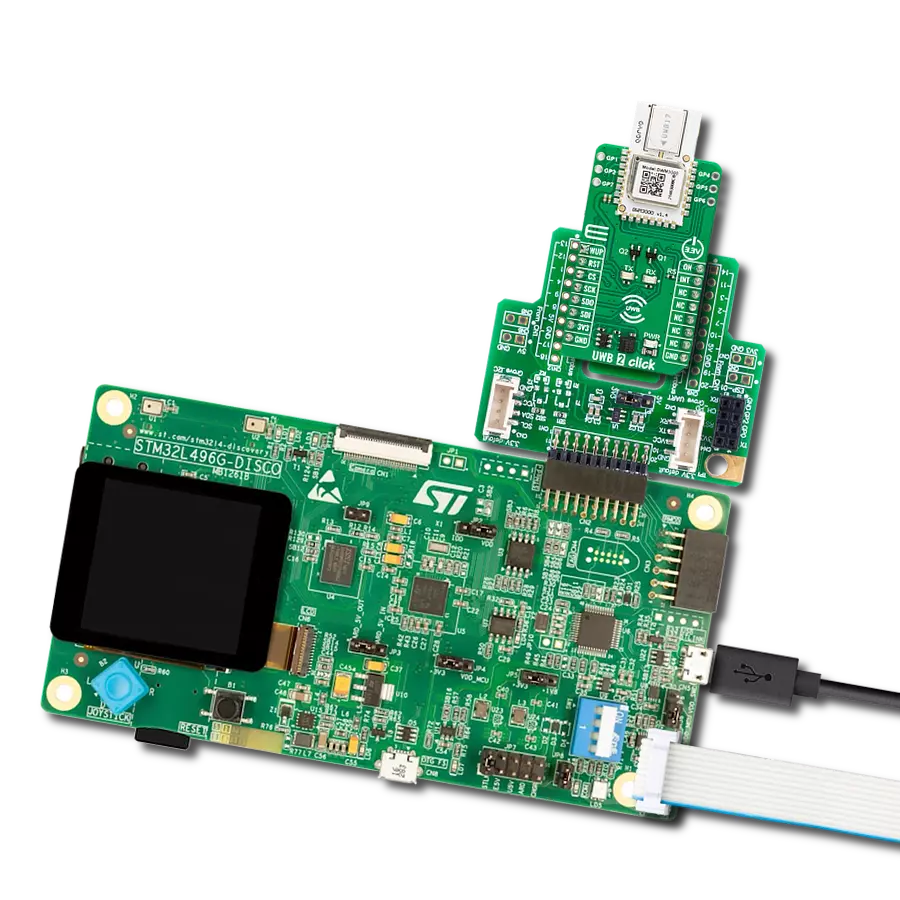
Start by selecting your development board and Click board™. Begin with the Curiosity PIC32 MZ EF as your development board.













Software Support
Library Description
This library contains API for UWB Click driver.
Key functions:
uwb_set_mode- This function set device working mode.uwb_get_transmit_status- This function get transmit status.uwb_start_transceiver- This function start communication of device.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief Uwb Click example
*
* # Description
* UWB Click sends and receive data, depending on the selected device mode.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and configures the Click board for the selected mode.
*
* ## Application Task
* Depending on the selected mode, it reads all the received data or sends the desired message
* every 2 seconds.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "uwb.h"
// ------------------------------------------------------------------ VARIABLES
static uwb_t uwb;
static log_t logger;
// Device mode setter - selects the module working mode RX(receiver)/TX(transmitter)
static uint8_t dev_mode = UWB_MODE_TX;
// Transmit buffers
static uint8_t data_tx_1[ 7 ] = "MikroE";
static uint8_t data_tx_2[ 10 ] = "UWB Click";
// Transmit length read var
static uint16_t temp_len = 0;
// Recieved data buffer
static uint8_t transmit_data[ 256 ] = { 0 };
// Dev_status var
static uint8_t dev_status = { 0 };
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
uwb_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
uwb_cfg_setup( &cfg );
UWB_MAP_MIKROBUS( cfg, MIKROBUS_1 );
uwb_init( &uwb, &cfg );
Delay_ms ( 100 );
uwb_enable ( &uwb );
Delay_ms ( 100 );
uint8_t id_raw[ 4 ] = { 0 };
uwb.offset = UWB_SUB_NO;
uwb_generic_read( &uwb, UWB_REG_DEV_ID, &id_raw[ 0 ], 4 );
uint16_t tag_data = ( ( uint16_t ) id_raw[ 3 ] << 8 ) | id_raw[ 2 ];
if ( UWB_TAG != tag_data )
{
log_printf( &logger, " ***** ERROR ***** \r\n" );
for ( ; ; );
}
uwb_set_mode( &uwb, UWB_MODE_IDLE );
//-----------------------------------------------------
// Setting device mode and interrupt for that mode as well as clearing dev_status reg.
uwb_set_mode( &uwb, dev_mode );
uwb_int_mask_set( &uwb );
uwb_clear_status( &uwb );
// Setting device address and network ID
log_printf( &logger, " ******************** \r\n" );
if ( UWB_MODE_RX == dev_mode )
{
uwb_set_dev_adr_n_network_id( &uwb, 6, 10 );
log_printf( &logger, " ***** RECEIVER ***** \r\n" );
}
else if ( UWB_MODE_TX == dev_mode )
{
uwb_set_dev_adr_n_network_id( &uwb, 5, 10 );
log_printf( &logger, " **** TRANSMITER **** \r\n" );
}
log_printf( &logger, " ******************** \r\n" );
Delay_ms ( 100 );
// Setting default configuartion and tuning device for that configuration
uwb_use_smart_power( &uwb, UWB_LOW );
uwb_frame_check( UWB_LOW );
uwb_frame_filter( &uwb, UWB_LOW );
uwb_set_transmit_type( &uwb, &UWB_TMODE_LONGDATA_RANGE_LOWPOWER[ 0 ] );
uwb_set_channel( &uwb, UWB_CHANNEL_5 );
uwb_tune_config( &uwb );
Delay_ms ( 100 );
if ( UWB_MODE_RX == dev_mode )
{
// Setup for first receive
uwb_set_mode( &uwb, UWB_MODE_IDLE );
uwb_set_bit ( &uwb, UWB_REG_SYS_CFG, 29, UWB_HIGH );
uwb_set_bit ( &uwb, UWB_REG_SYS_CFG, 30, UWB_HIGH );
uwb_set_bit ( &uwb, UWB_REG_SYS_CFG, 31, UWB_HIGH );
uwb_set_mode( &uwb, UWB_MODE_RX );
uwb_clear_status( &uwb );
uwb_start_transceiver( &uwb );
}
else if ( UWB_MODE_TX == dev_mode )
{
// Setup for first transmit
uwb_set_mode( &uwb, UWB_MODE_IDLE );
uwb_clear_status( &uwb );
uwb_set_transmit( &uwb, &data_tx_1[ 0 ], 6 );
uwb_set_mode( &uwb, UWB_MODE_TX );
uwb_start_transceiver( &uwb );
log_printf( &logger, " - Transmit 1 done - \r\n" );
}
log_printf( &logger, " ***** APP TASK ***** \r\n" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
void application_task ( void )
{
dev_status = uwb_get_qint_pin_status( &uwb );
if ( UWB_MODE_RX == dev_mode )
{
if ( dev_status )
{
// Reading transmitted data, logs it and resetting to receive mode
uwb_set_mode( &uwb, UWB_MODE_IDLE );
uwb_clear_status( &uwb );
temp_len = uwb_get_transmit_len( &uwb );
uwb_get_transmit( &uwb, &transmit_data[ 0 ], temp_len );
log_printf( &logger, "Received data: %s\r\n", transmit_data );
log_printf( &logger, " - Receive done - \r\n" );
uwb_set_mode( &uwb, UWB_MODE_RX );
uwb_start_transceiver( &uwb );
}
}
else if ( UWB_MODE_TX == dev_mode )
{
if ( dev_status )
{
// Transmits data, resetting to transmit mode and sets 2sec delay
uwb_set_mode( &uwb, UWB_MODE_IDLE );
uwb_clear_status( &uwb );
uwb_set_transmit( &uwb, &data_tx_2[ 0 ], 9 );
uwb_set_mode( &uwb, UWB_MODE_TX );
uwb_start_transceiver( &uwb );
log_printf( &logger, " - Transmit 2 done - \r\n" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
uwb_set_mode( &uwb, UWB_MODE_IDLE );
uwb_clear_status( &uwb );
uwb_set_transmit( &uwb, &data_tx_1[ 0 ], 6 );
uwb_set_mode( &uwb, UWB_MODE_TX );
uwb_start_transceiver( &uwb );
log_printf( &logger, " - Transmit 1 done - \r\n" );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
}
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:UWB