Experience the future of temperature record-keeping with MAX6642 and PIC32MZ2048EFM100
We keep your temperature wisdom stored safely

Published Nov 08, 2023
Click board™
Temp-Log 6 Click
Dev. board
Curiosity PIC32 MZ EF
Compiler
NECTO Studio
MCU
PIC32MZ2048EFM100
Elevate your temperature monitoring game with our solution's advanced EEPROM memory, ensuring you have the data you need when you need it.
A
A
Hardware Overview
How does it work?
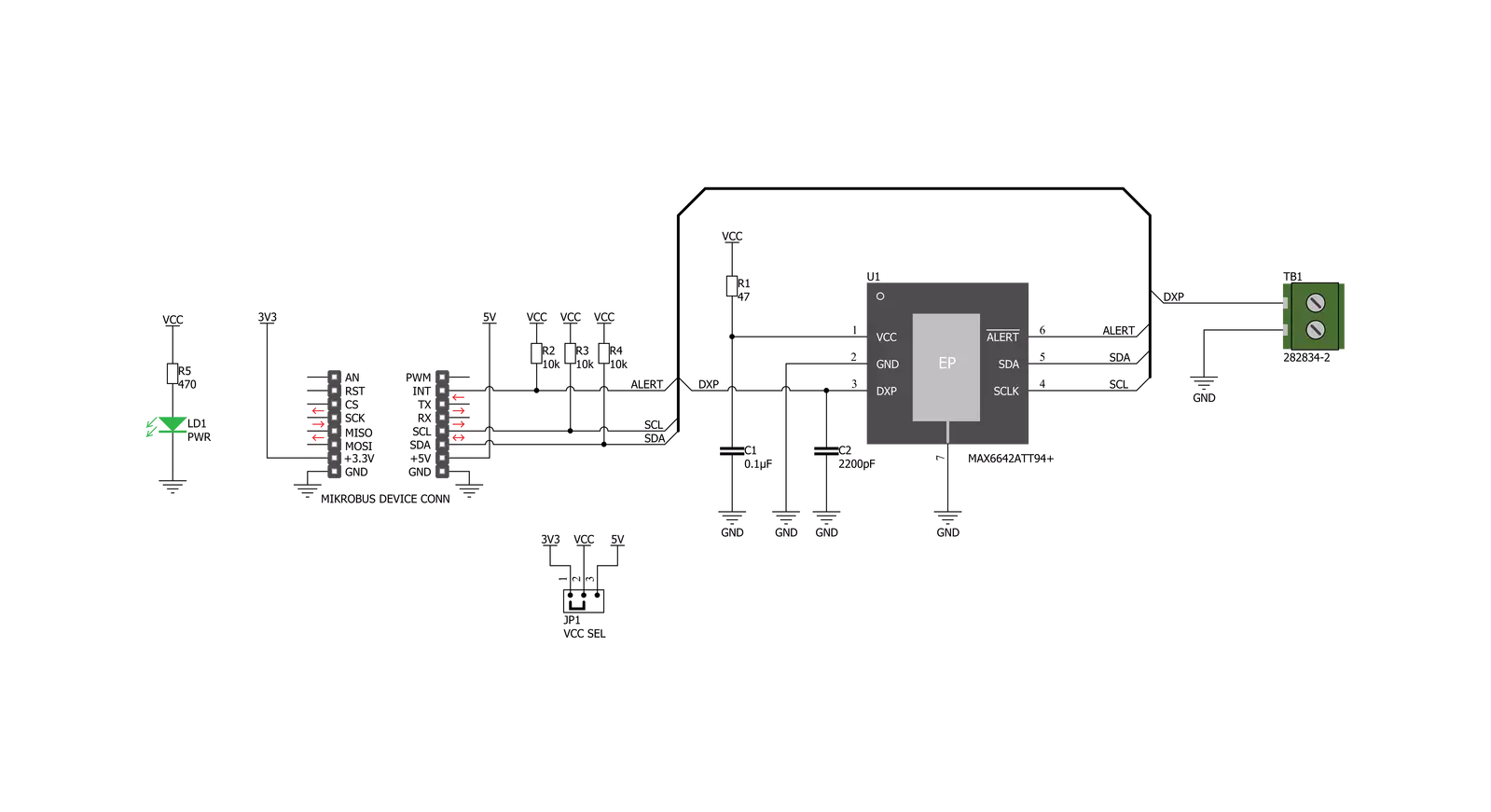
Temp-Log 6 Click is based on the MAX6642, a ±1°C, SMBus/I2C compatible local/remote temperature sensor with an overtemperature alarm, from Analog Devices. This sensor is capable of measuring its own die temperature, as well as a temperature of a remote PN junction, which can be either a PNP transistor on a substrate of some integrated component (typically CPU, FPGA, ASIC or GPU), but also a discrete diode-connected PNP transistor with its collector grounded. There are some specific requirements for a discrete component when using it as a remote temperature sensor: it has to be a small signal PNP transistor with its collector grounded along with its base, while the emitter is connected to the DXP input pin of the MAX6642. Datasheet of the MAX6642 also states some forward voltage ranges for the highest and the lowest expected temperatures, so the transistor should be selected according to these parameters. The discrete component can be connected to the screw terminal at the edge of the Click board™. The MAX6642 features a 10-bit ADC
which results in having the 0.25°C resolution. For the local temperature sensing, there are only 8 bits of data available, while the full 10-bit resolution is used for the remote sensing. The MAX6642 IC automatically sends biasing current through the PN junctions, while the IC samples the forward voltage for the given current and calculates the temperature. The ADC integrates the result over a period of 60ms, reducing the noise that way. Therefore, the temperature acquisition is not particularly fast. In return, the temperature measurement results are more accurate and reliable. The accuracy of the remote measurement depends on the ideality factor of the remote PN junction. The ideality factor is one of the listed specifications of devices equipped with such on-chip elements. The MAX6642 is designed for an ideality factor of 1.008, a typical value for the Intel Pentium III CPU. However, if using IC with a different ideality factor, a conversion formula needs to be applied. The conversion formula can be found within the MAX6642 datasheet. The MAX6642 IC also features the ALERT reporting
capability. If a programmed threshold is exceeded, the ALERT pin will be asserted to a LOW logic level. When the ALERT pin is asserted, it will remain latched until its STATUS register is read after the overtemperature condition no longer exists. Another way to clear the ALERT interrupt is to respond to the alert response address. This is a global I2C/SMBus protocol, where the host MCU broadcasts a Receive Byte transmission after the interrupt is received. One (or more) slave devices which generated this interrupt will respond, sending their I2C slave address, following the bus arbitration rules. This protocol is explained in more details within the MAX6642 datasheet. The ALERT pin is routed to the INT pin of the mikroBUS™ and it is pulled up by a resistor. Temp-Log 6 click uses an I2C interface to communicate with the host MCU. It is equipped with an SMD jumper labeled as VCC SEL. This jumper is used to select the power supply for the pull-up resistors on the I2C bus, allowing both 3.3V and 5V MCUs to be interfaced with this Click board™.

Features overview
Development board
Curiosity PIC32 MZ EF development board is a fully integrated 32-bit development platform featuring the high-performance PIC32MZ EF Series (PIC32MZ2048EFM) that has a 2MB Flash, 512KB RAM, integrated FPU, Crypto accelerator, and excellent connectivity options. It includes an integrated programmer and debugger, requiring no additional hardware. Users can expand
functionality through MIKROE mikroBUS™ Click™ adapter boards, add Ethernet connectivity with the Microchip PHY daughter board, add WiFi connectivity capability using the Microchip expansions boards, and add audio input and output capability with Microchip audio daughter boards. These boards are fully integrated into PIC32’s powerful software framework, MPLAB Harmony,
which provides a flexible and modular interface to application development a rich set of inter-operable software stacks (TCP-IP, USB), and easy-to-use features. The Curiosity PIC32 MZ EF development board offers expansion capabilities making it an excellent choice for a rapid prototyping board in Connectivity, IOT, and general-purpose applications.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Curiosity PIC32 MZ EF as your development board.














Software Support
Library Description
This library contains API for Temp-Log 6 Click driver.
Key functions:
templog6_write_byte- Writes one byte of data.templog6_read_byte- Reads one byte of data.templog6_get_interrupt- Gets the INT pin.
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief TempLog6 Click example
*
* # Description
* The example starts off with the initialization and configuration of the Click and logger
* modules, tests the communication channel and reads and displays local and remote temperature
* values every second.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes and configures the Click and logger modules and tests the communication for errors.
*
* ## Application Task
* Reads and displays local and remote temperature values every second.
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "templog6.h"
// ------------------------------------------------------------------ VARIABLES
static templog6_t templog6;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( )
{
log_cfg_t log_cfg;
templog6_cfg_t cfg;
uint8_t test;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
templog6_cfg_setup( &cfg );
TEMPLOG6_MAP_MIKROBUS( cfg, MIKROBUS_1 );
templog6_init( &templog6, &cfg );
// Test communication
test = templog6_read_byte( &templog6, TEMPLOG6_REG_MANUFACTURER_ID );
if ( test == TEMPLOG6_MANUFACTURER_ID )
{
log_printf( &logger, "--- Comunication OK!!! ---\r\n" );
}
else
{
log_printf( &logger, "--- Comunication ERROR!!! ---\r\n" );
for ( ; ; );
}
templog6_default_cfg( &templog6 );
log_printf( &logger, "--- Start measurement ---\r\n" );
}
void application_task ( )
{
float remote_temp;
float local_temp;
local_temp = templog6_read_byte( &templog6, TEMPLOG6_REG_LOCAL_TEMPERATURE );
log_printf( &logger, "--- Local Temperature: %f C\r\n", local_temp );
remote_temp = templog6_read_byte( &templog6, TEMPLOG6_REG_REMOTE_TEMPERATURE );
log_printf( &logger, "--- Remote Temperature: %f C\r\n", remote_temp );
log_printf( &logger, "-----------------------------\r\n" );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Temperature & humidity