Ensure your space remains cozy and balanced with Si7034 and PIC32MZ2048EFM100
Measure the elements that matter most for a healthier environment

Published Nov 07, 2023
Click board™
Temp&Hum 2 Click
Dev. board
Curiosity PIC32 MZ EF
Compiler
NECTO Studio
MCU
PIC32MZ2048EFM100
Our mission is to empower you with precise temperature and humidity measurements, ensuring that you can effortlessly maintain a balanced, comfortable, and eco-conscious living or working space
A
A
Hardware Overview
How does it work?
Temp&Hum 2 Click is based on the Si7034, a digital humidity and temperature sensor IC with I2C interface, from Silicon Labs. It is a digital relative humidity and a temperature sensor that integrates temperature and humidity sensor elements, an analog-to-digital converter, signal processing, calibration, and data correction on the chip. Each chip is factory calibrated, and the calibration data is stored in its non-volatile memory. The maximum accuracy achieved with this sensor is ± 4% RH for the humidity range from 0 to 80%. Besides the humidity sensing element, this sensor includes an accurate thermal sensor, which can achieve up to ±0.4 °C. It is used in conjunction with the humidity measurement, to allow thermal compensation of the relative humidity measurements. This sensor IC also has an integrated heating element that is used to evaporate condensation reducing the effect of the offset accumulation when used in high humidity conditions, or to implement dew-point
measurement when the Si7034 is used with a separate temperature sensor. The heating element current can be adjusted by the appropriate bits in the Humidity Control Register. Due to the nature of the used sensors, a special care should be taken to reduce the sensor contamination to a minimum. Particles, dirt or other artifacts collected on the surface of the exposed polymer film will affect its ability to measure the humidity, and therefore, the manufacturer recommends protecting the sensor against particles. The sensor otherwise has a long aging period with minimal drift. Synthetic long-term stability tests show less than 0.25 %RH per year drift. The data provided by the IC is ready to be used directly. Two measurements are done when a command is received via the I2C. One is the humidity measurement, while the second is temperature measurement, used for the compensation. Si7034 IC operates on 1.8V and therefore, a small LDO has to be used to convert 3.3V from the mikroBUS™
power rail, down to 1.8V. In addition, the I2C signal voltage levels also have to be converted so it can be used with the MCUs operated with 3.3V. For this purpose, the Click board™ utilizes the PCA9306, a level shifting IC, made by Texas Instruments. It uses 1.8V as the first reference voltage and 3,3V from the mikroBUS™ power rail as the second reference voltage, shifting the I2C communication signal levels, allowing this Click board™ to be used with MCUs operated at 3.3V. The sensor IC is physically located away from other components on the Click board™, so the heating influence of the surrounding components or PCB is reduced to a minimum, allowing the accuracy of the Click board™ to stay within the specifications. The i2C lines of the IC are routed to the mikroBUS™ and supplied by the pull-up resistors, allowing this Click board™ to be used right out of the box. Temp&Hum 2 click uses only 3.3V rail from the mikroBUS™.

Features overview
Development board
Curiosity PIC32 MZ EF development board is a fully integrated 32-bit development platform featuring the high-performance PIC32MZ EF Series (PIC32MZ2048EFM) that has a 2MB Flash, 512KB RAM, integrated FPU, Crypto accelerator, and excellent connectivity options. It includes an integrated programmer and debugger, requiring no additional hardware. Users can expand
functionality through MIKROE mikroBUS™ Click™ adapter boards, add Ethernet connectivity with the Microchip PHY daughter board, add WiFi connectivity capability using the Microchip expansions boards, and add audio input and output capability with Microchip audio daughter boards. These boards are fully integrated into PIC32’s powerful software framework, MPLAB Harmony,
which provides a flexible and modular interface to application development a rich set of inter-operable software stacks (TCP-IP, USB), and easy-to-use features. The Curiosity PIC32 MZ EF development board offers expansion capabilities making it an excellent choice for a rapid prototyping board in Connectivity, IOT, and general-purpose applications.

Microcontroller Overview
MCU Card / MCU

Architecture
PIC32
MCU Memory (KB)
2048
Silicon Vendor
Microchip
Pin count
100
RAM (Bytes)
524288
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic

Step by step
Project assembly

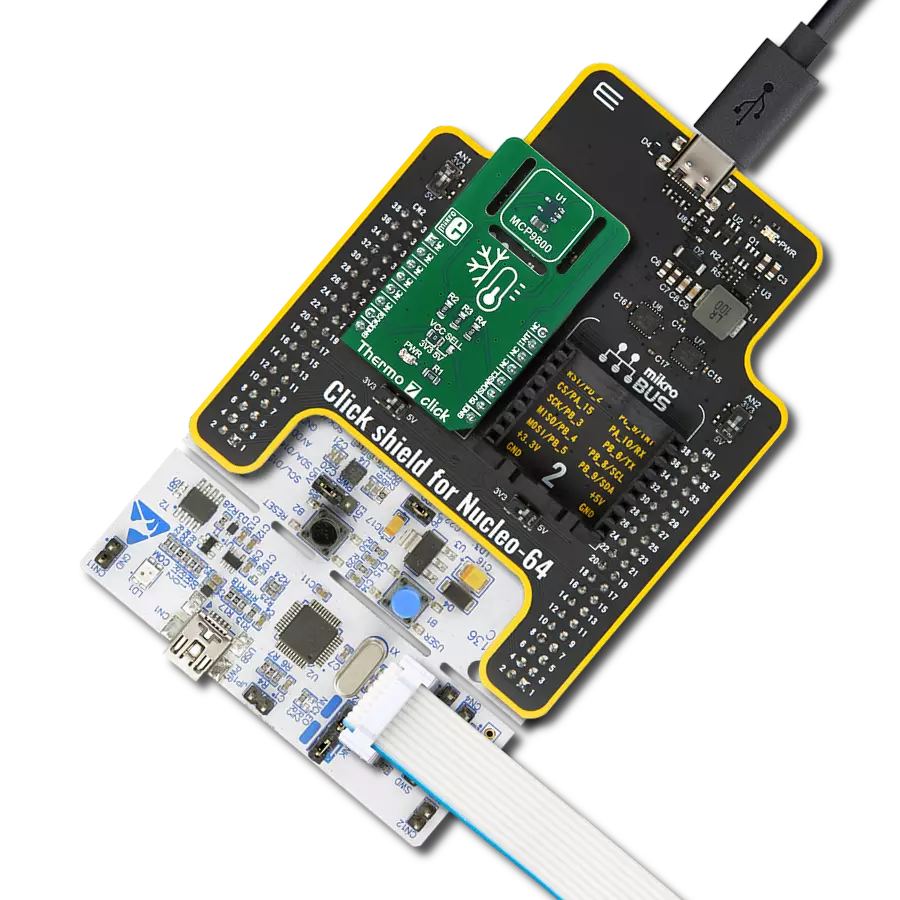
Start by selecting your development board and Click board™. Begin with the Curiosity PIC32 MZ EF as your development board.













Software Support
Library Description
This library contains API for Temp&Hum 2 Click driver.
Key functions:
temhum2_get_eletronic_id- This function for reads Eletronic IDtemphum2_set_mode- Functions for set measurement modetemphum2_get_measurement- Functions for mesurement
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* \file
* \brief TempHum2 Click example
*
* # Description
* This application measures temperature and humidity.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes driver init, set work mode and Heater
*
* ## Application Task
* Reads temperature and humidity and logs values on usbuart for every 500ms.
*
*
* \author MikroE Team
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "temphum2.h"
// ------------------------------------------------------------------ VARIABLES
static temphum2_t temphum2;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
temphum2_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
temphum2_cfg_setup( &cfg );
TEMPHUM2_MAP_MIKROBUS( cfg, MIKROBUS_1 );
temphum2_init( &temphum2, &cfg );
temphum2_default_cfg( &temphum2 );
}
void application_task ( void )
{
float data_buffer[ 2 ];
temphum2_get_measurement( &temphum2, &data_buffer[ 0 ] );
log_printf( &logger, " --- Temperature : %.2f C \r\n ", data_buffer[ 0 ] );
log_printf( &logger, " --- Humidity : %.2f RH \r\n ", data_buffer[ 1 ] );
Delay_ms ( 500 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Temperature & humidity