Master motor speed control with Si8711CC and STM32F407VGT6
PWM precision meets motor control

Published Dec 29, 2023
Click board™
PWM driver Click
Dev. board
Clicker 4 for STM32F4
Compiler
NECTO Studio
MCU
STM32F407VGT6
Unlock speed control possibilities with our PWM-controlled DC motor solution
A
A
Hardware Overview
How does it work?
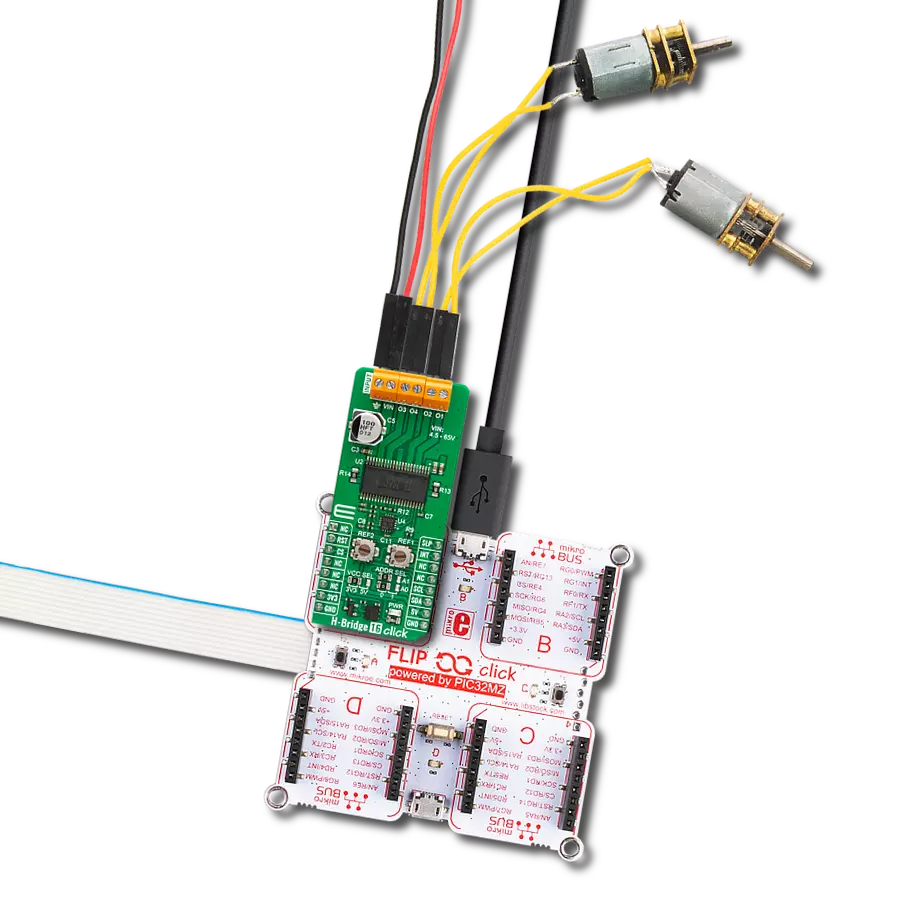
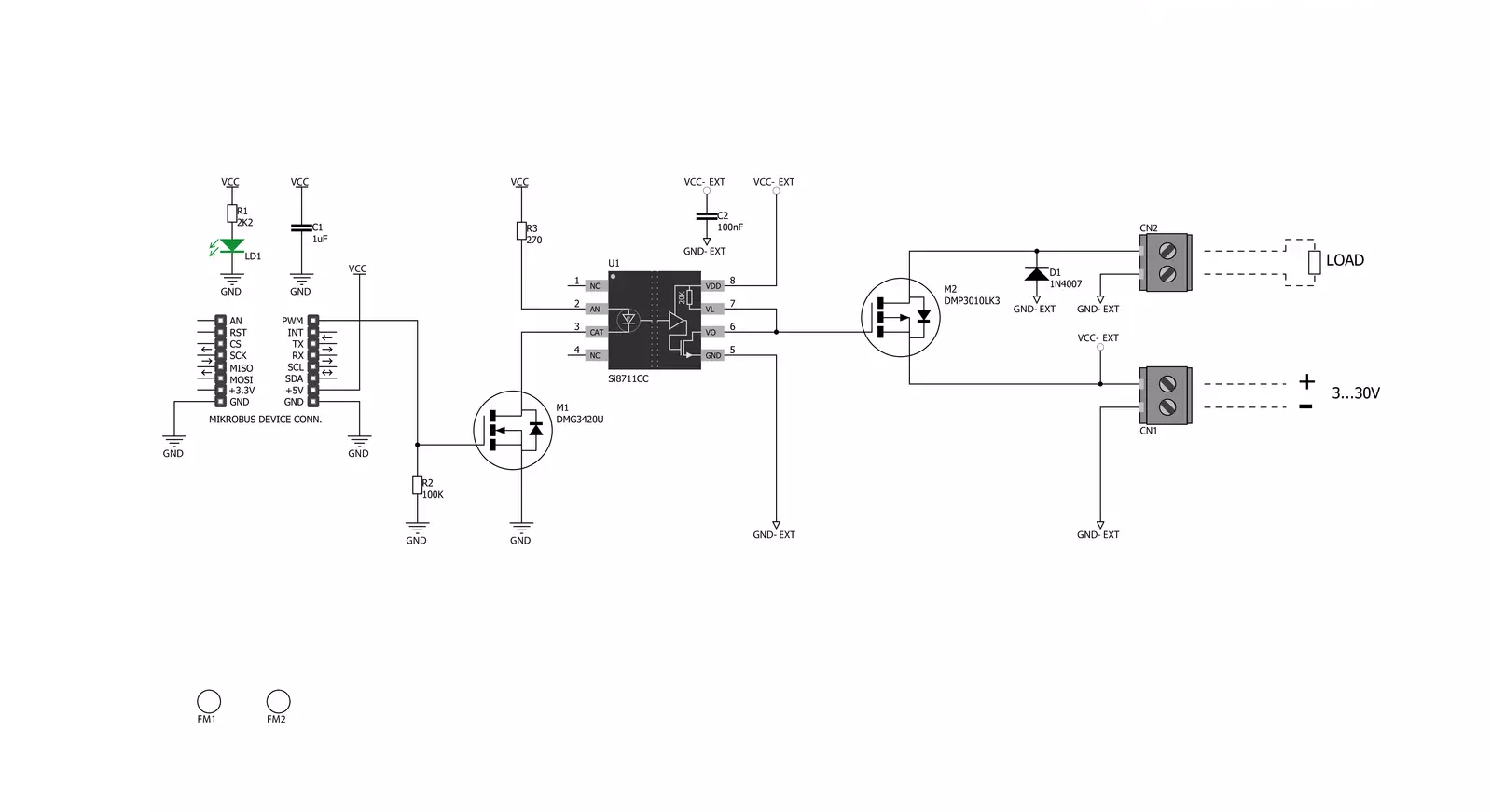
PWM driver Click is based on the Si8711CC, a 5kV LED emulator input, open collector output isolator from Skyworks. Compared to the optocouplers, the Si8711CC is more resistant to temperature, age, and forward current effects. It has a longer service life, higher common-mode transient immunity, and more. The Si8711CC is based on proprietary CMOS isolation technology for low-power, high-speed operation and is resistant to wear-out effects that, in the case of optocouplers, degrade the performance. The Si8711CC features up to 5000VRMS isolation and 10kV surge protection, making it a perfect isolator. For controlling the devices, it is capable of data rates DC of up to 15Mbps, with a propagation delay of 30ns. The Si8711CC controls the loads over the DMP3010LK3,
a P-channel enhancement mode MOSFET from Diodes Incorporated. This fast-switching diode has ESD protected gate, low input capacitance, and low on-resistance, designed to maintain superior switching performance, making it ideal for high-efficiency power management applications. The PWM Driver Click comes with the screw terminals labeled LOAD (+END, -END) to connect the load, which the Si7811CC controls over the DMP3010LK3 diode, and EXT for external power supply. It is not recommended to use this Click board™ with loads over 50W as the MOSFET can get overheated; this, however, does not apply if the Click board™ is used as an ON/OFF switch. The PWM Driver Click is controlled by the host MCU by PWM pulses over the PWM pin of the mikroBUS™ socket. The PWM
pin does not have direct control over the Si8711CC but rather through the DMG3420U, an N-channel enhancement mode MOSFET from Diodes Incorporated. This diode shares many features with the one mentioned above, such as low on-resistance, low input capacitance, fast switching speed, and more. This Click board™ can be operated only with a 5V logic voltage level. The board must perform appropriate logic voltage level conversion before using MCUs with different logic levels. However, the Click board™ comes equipped with a library containing functions and an example code that can be used, as a reference, for further development.

Features overview
Development board
Clicker 4 for STM32F4 is a compact development board designed as a complete solution that you can use to quickly build your own gadgets with unique functionalities. Featuring an STM32F407VGT6 MCU, four mikroBUS™ sockets for Click boards™ connectivity, power management, and more, it represents a perfect solution for the rapid development of many different types of applications. At its core is an STM32F407VGT6 MCU, a powerful microcontroller by STMicroelectronics based on the high-performance
Arm® Cortex®-M4 32-bit processor core operating at up to 168 MHz frequency. It provides sufficient processing power for the most demanding tasks, allowing Clicker 4 to adapt to any specific application requirements. Besides two 1x20 pin headers, four improved mikroBUS™ sockets represent the most distinctive connectivity feature, allowing access to a huge base of Click boards™, growing on a daily basis. Each section of Clicker 4 is clearly marked, offering an intuitive and clean interface. This makes working with the
development board much simpler and, thus, faster. The usability of Clicker 4 doesn’t end with its ability to accelerate the prototyping and application development stages: it is designed as a complete solution that can be implemented directly into any project, with no additional hardware modifications required. Four mounting holes [4.2mm/0.165”] at all four corners allow simple installation by using mounting screws.

Microcontroller Overview
MCU Card / MCU

Architecture
ARM Cortex-M4
MCU Memory (KB)
10
Silicon Vendor
STMicroelectronics
Pin count
100
RAM (Bytes)
100
Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic
Step by step
Project assembly

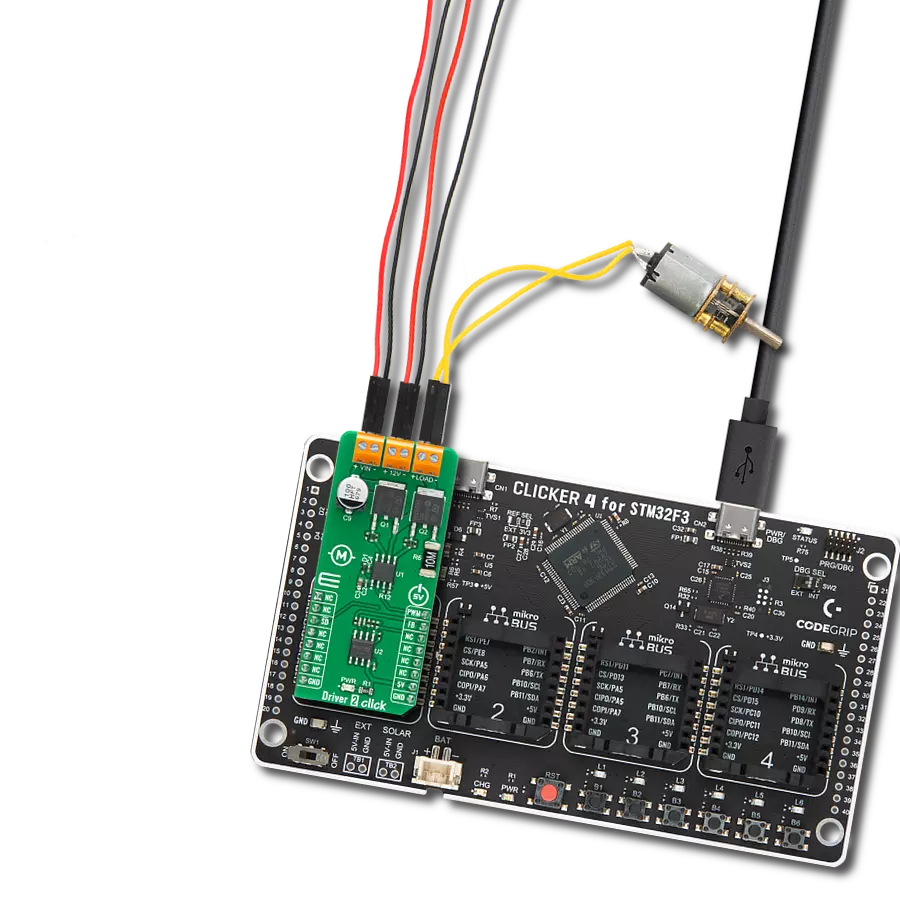
Start by selecting your development board and Click board™. Begin with the Clicker 4 for STM32F4 as your development board.













Software Support
Library Description
This library contains API for PWM driver Click driver.
Key functions:
pwmdriver_set_duty_cycle- Generic sets PWM duty cyclepwmdriver_pwm_stop- Stop PWM modulepwmdriver_pwm_start- Start PWM module
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file
* @brief PwmDriver Click example
*
* # Description
* This application is controls the speed DC motors.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initialization driver enables - GPIO, PWM initialization set PWM duty cycle and PWM frequency,
* start PWM, enable the engine, and start to write log.
*
* ## Application Task
* This is an example that demonstrates the use of the PWM driver Click board.
* This example shows the automatic control of PWM,
* the first increases duty cycle and then the duty cycle is falling.
* Results are being sent to the Usart Terminal where you can track their changes.
*
* *note:*
* EXT PWR 3-30VDC
*
* @author Nikola Peric
*
*/
// ------------------------------------------------------------------- INCLUDES
#include "board.h"
#include "log.h"
#include "pwmdriver.h"
// ------------------------------------------------------------------ VARIABLES
static pwmdriver_t pwmdriver;
static log_t logger;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
pwmdriver_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
pwmdriver_cfg_setup( &cfg );
PWMDRIVER_MAP_MIKROBUS( cfg, MIKROBUS_1 );
pwmdriver_init( &pwmdriver, &cfg );
Delay_ms ( 100 );
log_printf( &logger, " Initialization PWM \r\n " );
pwmdriver_set_duty_cycle( &pwmdriver, 0.0 );
pwmdriver_pwm_start( &pwmdriver );
Delay_ms ( 1000 );
log_info( &logger, "---- Application Task ----" );
}
void application_task ( void )
{
static int8_t duty_cnt = 1;
static int8_t duty_inc = 1;
float duty = duty_cnt / 10.0;
pwmdriver_set_duty_cycle ( &pwmdriver, duty );
log_printf( &logger, "Duty: %d%%\r\n", ( uint16_t )( duty_cnt * 10 ) );
Delay_ms ( 500 );
if ( 10 == duty_cnt )
{
duty_inc = -1;
}
else if ( 0 == duty_cnt )
{
duty_inc = 1;
}
duty_cnt += duty_inc;
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Brushed