Empower your projects with serial-controlled driver based on the MAX22200 and PIC18F57Q43
Master the flow!

Published Feb 13, 2024
Click board™
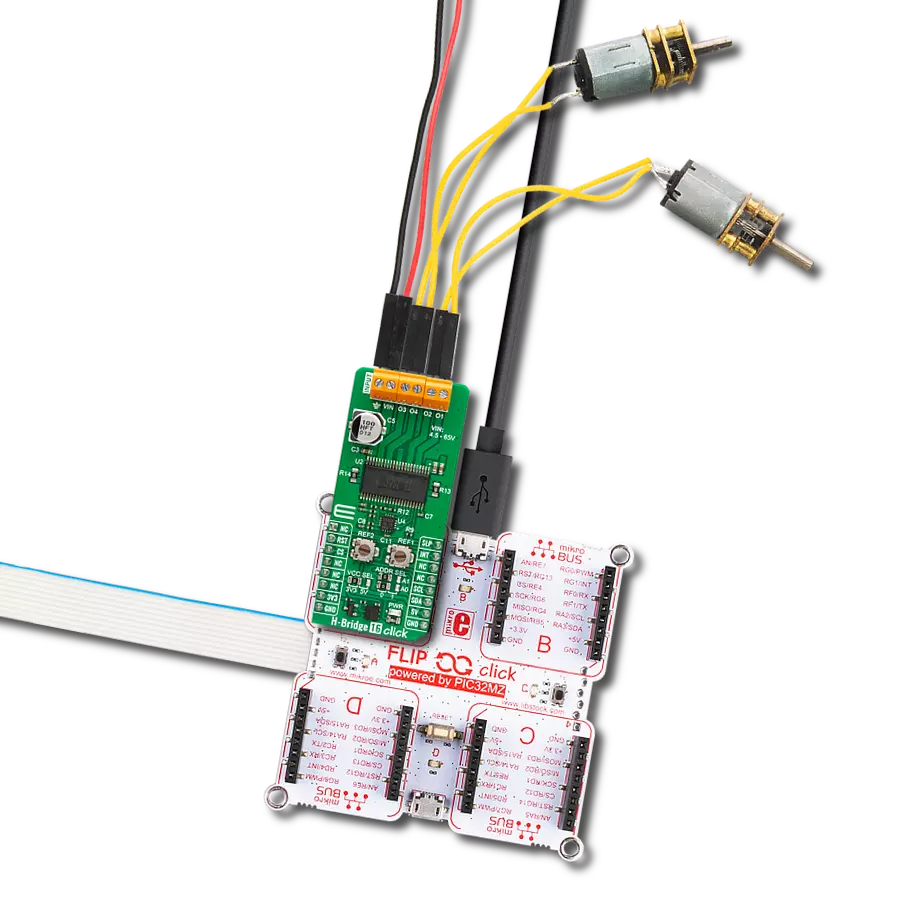
H-Bridge 11 Click
Dev. board
Curiosity Nano with PIC18F57Q43
Compiler
NECTO Studio
MCU
PIC18F57Q43
Streamline the operation of multiple solenoids and motors, and ensure synchronized movements and optimized performance in various systems
A
A
Hardware Overview
How does it work?
H-Bridge 11 Click is based on the MAX22200, an octal serial-controlled solenoid and motor driver from Analog Devices. The MAX22200 is rated for an operating voltage range from 4.5V to 36V, which can be brought externally through a VIN screw terminal. Each channel, market with OUTx, can be configured as a low-side or high-side driver and features a low-impedance with 200mΩ typical ON-resistance push-pull output stage with sink-and-source driving capability and up to 1A RMS driving current. Also, pairs of half-bridges can be paralleled to double the driving current or can be configured as full-bridges to drive up to four latched valves (bistable valves) or four brushed DC motors. The MAX22200 features a two-level drive sequence for optimal control of solenoid valves such as voltage-drive (VDR) and current-drive regulation (CDR) (low-side driver only). In VDR mode, the MAX22200 outputs a PWM voltage with a programmable duty cycle through the SPI interface. The output current is proportional to the programmed duty cycle for a given supply voltage and solenoid resistor. In CDR mode, an internal
integrated lossless current sensing (ICS) circuit senses the output current and compares it with a programmable reference current. The CDR loop modifies the PWM duty cycle so that the output current peak matches the programmed reference current. Reference current can be set using the IREF SEL jumper, providing the possibility of setting a current of 1A, 0.5A, or 0.25A depending on the position of the jumper and the set HFS bit (jumper at position 15k with HFS_bit=0 provides 1A, jumper at position 30k with HFS_bit=1 provides 0.25A). This Click board™ communicates with MCU through a standard SPI interface, supporting clock speed up to 5MHz and the most common SPI mode, SPI Mode 0. It also can be turned on or off through the RST pin of the mikroBUS™ socket, hence, offering a switch operation to turn ON/OFF power delivery to the MAX22200. Depending on the content of the TRGnSPI bit in the configuration register of that specific channel, the driver channels can be activated/deactivated either using the SPI interface or through a logic input signal on unpopulated header pins TRIGA
and TRIGB (0, 2, 4, 6 can be triggered by the logic input TRIGA, while 1, 3, 5, 7 can be triggered by using the logic input TRIGB). For a successful register write/read function, it is first necessary to set the CMD pin of the mikroBUS™ socket to an appropriate logic level: high for the write and low for the read command. It also provides a fault status indication signal, routed to the FLT pin of the mikroBUS™ socket, alongside its red LED indicator marked as FAULT to indicate different fault conditions such as overcurrent protection, thermal shutdown, undervoltage lockout, open-load detection, and detection of plunger movement. This Click board™ can operate with either 3.3V or 5V logic voltage levels selected via the VCC SEL jumper. This way, both 3.3V and 5V capable MCUs can use the communication lines properly. The Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used, as a reference, for further development.

Features overview
Development board
PIC18F57Q43 Curiosity Nano evaluation kit is a cutting-edge hardware platform designed to evaluate microcontrollers within the PIC18-Q43 family. Central to its design is the inclusion of the powerful PIC18F57Q43 microcontroller (MCU), offering advanced functionalities and robust performance. Key features of this evaluation kit include a yellow user LED and a responsive
mechanical user switch, providing seamless interaction and testing. The provision for a 32.768kHz crystal footprint ensures precision timing capabilities. With an onboard debugger boasting a green power and status LED, programming and debugging become intuitive and efficient. Further enhancing its utility is the Virtual serial port (CDC) and a debug GPIO channel (DGI
GPIO), offering extensive connectivity options. Powered via USB, this kit boasts an adjustable target voltage feature facilitated by the MIC5353 LDO regulator, ensuring stable operation with an output voltage ranging from 1.8V to 5.1V, with a maximum output current of 500mA, subject to ambient temperature and voltage constraints.

Microcontroller Overview
MCU Card / MCU
Architecture
PIC
MCU Memory (KB)
128
Silicon Vendor
Microchip
Pin count
48
RAM (Bytes)
8196
You complete me!
Accessories
Curiosity Nano Base for Click boards is a versatile hardware extension platform created to streamline the integration between Curiosity Nano kits and extension boards, tailored explicitly for the mikroBUS™-standardized Click boards and Xplained Pro extension boards. This innovative base board (shield) offers seamless connectivity and expansion possibilities, simplifying experimentation and development. Key features include USB power compatibility from the Curiosity Nano kit, alongside an alternative external power input option for enhanced flexibility. The onboard Li-Ion/LiPo charger and management circuit ensure smooth operation for battery-powered applications, simplifying usage and management. Moreover, the base incorporates a fixed 3.3V PSU dedicated to target and mikroBUS™ power rails, alongside a fixed 5.0V boost converter catering to 5V power rails of mikroBUS™ sockets, providing stable power delivery for various connected devices.

DC Gear Motor - 430RPM (3-6V) represents an all-in-one combination of a motor and gearbox, where the addition of gear leads to a reduction of motor speed while increasing the torque output. This gear motor has a spur gearbox, making it a highly reliable solution for applications with lower torque and speed requirements. The most critical parameters for gear motors are speed, torque, and efficiency, which are, in this case, 520RPM with no load and 430RPM at maximum efficiency, alongside a current of 60mA and a torque of 50g.cm. Rated for a 3-6V operational voltage range and clockwise/counterclockwise rotation direction, this motor represents an excellent solution for many functions initially performed by brushed DC motors in robotics, medical equipment, electric door locks, and much more.

Used MCU Pins
mikroBUS™ mapper
Take a closer look
Click board™ Schematic

Step by step
Project assembly

Start by selecting your development board and Click board™. Begin with the Curiosity Nano with PIC18F57Q43 as your development board.















Software Support
Library Description
This library contains API for H-Bridge 11 Click driver.
Key functions:
hbridge11_get_fault_pin- This function returns the fault pin logic statehbridge11_read_flags- This function reads and clears the fault flags from the status registerhbridge11_set_motor_state- This function sets the operating state for the selected motor from the half-bridge pairs 0-1, 2-3, 4-5, or 6-7
Open Source
Code example
The complete application code and a ready-to-use project are available through the NECTO Studio Package Manager for direct installation in the NECTO Studio. The application code can also be found on the MIKROE GitHub account.
/*!
* @file main.c
* @brief H-Bridge 11 Click example
*
* # Description
* This example demonstrates the use of the H-Bridge 11 Click board by
* driving the DC motors connected between OUT0-OUT1 and OUT2-OUT3 in both directions.
*
* The demo application is composed of two sections :
*
* ## Application Init
* Initializes the driver and performs the Click default configuration.
*
* ## Application Task
* Drives the motors connected between OUT0-OUT1 and OUT2-OUT3 in both directions
* in the span of 12 seconds, and logs data on the USB UART where you can track the program flow.
*
* @author Stefan Filipovic
*
*/
#include "board.h"
#include "log.h"
#include "hbridge11.h"
static hbridge11_t hbridge11;
static log_t logger;
/**
* @brief H-Bridge 11 check fault function.
* @details This function checks the fault pin state then reads the fault flags
* and displays on the USB UART.
* @return None.
* @note None.
*/
static void hbridge11_check_fault ( void );
void application_init ( void )
{
log_cfg_t log_cfg; /**< Logger config object. */
hbridge11_cfg_t hbridge11_cfg; /**< Click config object. */
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, " Application Init " );
// Click initialization.
hbridge11_cfg_setup( &hbridge11_cfg );
HBRIDGE11_MAP_MIKROBUS( hbridge11_cfg, MIKROBUS_1 );
if ( SPI_MASTER_ERROR == hbridge11_init( &hbridge11, &hbridge11_cfg ) )
{
log_error( &logger, " Communication init." );
for ( ; ; );
}
if ( HBRIDGE11_ERROR == hbridge11_default_cfg ( &hbridge11 ) )
{
log_error( &logger, " Default configuration." );
for ( ; ; );
}
log_info( &logger, " Application Task " );
}
void application_task ( void )
{
hbridge11_set_motor_state ( &hbridge11, HBRIDGE11_MOTOR_SEL_0, HBRIDGE11_MOTOR_STATE_FORWARD );
hbridge11_set_motor_state ( &hbridge11, HBRIDGE11_MOTOR_SEL_1, HBRIDGE11_MOTOR_STATE_FORWARD );
log_printf( &logger, "\r\n MOTOR 0: FORWARD\r\n" );
log_printf( &logger, " MOTOR 1: FORWARD\r\n" );
hbridge11_check_fault ( );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
hbridge11_set_motor_state ( &hbridge11, HBRIDGE11_MOTOR_SEL_0, HBRIDGE11_MOTOR_STATE_BRAKE );
hbridge11_set_motor_state ( &hbridge11, HBRIDGE11_MOTOR_SEL_1, HBRIDGE11_MOTOR_STATE_BRAKE );
log_printf( &logger, "\r\n MOTOR 0: BRAKE\r\n" );
log_printf( &logger, " MOTOR 1: BRAKE\r\n" );
hbridge11_check_fault ( );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
hbridge11_set_motor_state ( &hbridge11, HBRIDGE11_MOTOR_SEL_0, HBRIDGE11_MOTOR_STATE_REVERSE );
hbridge11_set_motor_state ( &hbridge11, HBRIDGE11_MOTOR_SEL_1, HBRIDGE11_MOTOR_STATE_REVERSE );
log_printf( &logger, "\r\n MOTOR 0: REVERSE\r\n" );
log_printf( &logger, " MOTOR 1: REVERSE\r\n" );
hbridge11_check_fault ( );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
hbridge11_set_motor_state ( &hbridge11, HBRIDGE11_MOTOR_SEL_0, HBRIDGE11_MOTOR_STATE_HI_Z );
hbridge11_set_motor_state ( &hbridge11, HBRIDGE11_MOTOR_SEL_1, HBRIDGE11_MOTOR_STATE_HI_Z );
log_printf( &logger, "\r\n MOTOR 0: DISCONNECTED\r\n" );
log_printf( &logger, " MOTOR 1: DISCONNECTED\r\n" );
hbridge11_check_fault ( );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
Delay_ms ( 1000 );
}
int main ( void )
{
/* Do not remove this line or clock might not be set correctly. */
#ifdef PREINIT_SUPPORTED
preinit();
#endif
application_init( );
for ( ; ; )
{
application_task( );
}
return 0;
}
static void hbridge11_check_fault ( void )
{
uint8_t fault_flags = 0;
if ( !hbridge11_get_fault_pin ( &hbridge11 ) )
{
if ( HBRIDGE11_OK == hbridge11_read_flags ( &hbridge11, &fault_flags ) )
{
log_printf ( &logger, " Fault flags: 0x%.2X\r\n", ( uint16_t ) fault_flags );
}
}
}
// ------------------------------------------------------------------------ END
Additional Support
Resources
Category:Brushed